
基于分数阶PID的四旋翼飞行器控制.pptx

快乐****蜜蜂

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于分数阶PID的四旋翼飞行器控制.pptx
基于分数阶PID的四旋翼飞行器控制01添加章节标题四旋翼飞行器简介定义与结构工作原理应用领域分数阶PID控制算法分数阶PID定义分数阶PID控制器设计分数阶PID的优势与挑战基于分数阶PID的四旋翼飞行器控制策略控制目标与要求控制策略设计控制器参数整定实验验证与结果分析实验平台搭建实验过程与数据记录结果分析性能评估与优化建议结论与展望研究成果总结未来研究方向感谢观看

基于分数阶PID的四旋翼飞行器控制的任务书.docx
基于分数阶PID的四旋翼飞行器控制的任务书一、任务背景随着无人机技术的不断发展,四旋翼飞行器已经成为广泛应用的一种无人机,其具有飞行稳定、操控灵活、载荷能力强等优点,因此被广泛应用于物流配送、灾害救援、军事侦查等领域。但是,四旋翼飞行器的控制问题一直是研究的热点和难点。传统PID控制方法是一种快速响应的控制方法,但是在控制精度和稳定性方面存在不足。针对PID控制方法的不足,研究人员提出了分数阶PID控制方法。分数阶PID控制方法在控制精度方面相比于传统方法有所提高,并且能够在控制系统发生变化时保持较好的稳
基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法.pdf
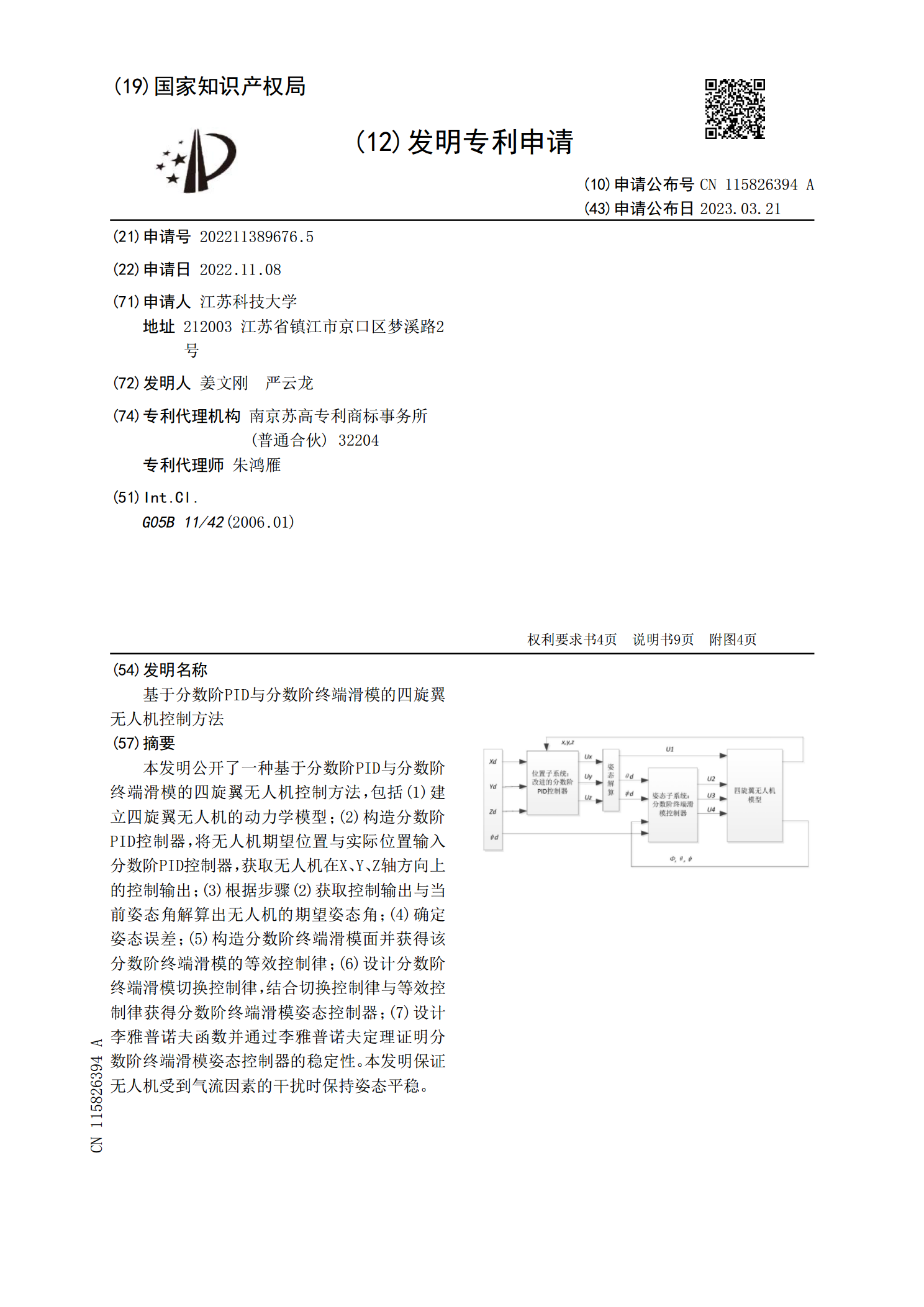
本发明公开了一种基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法,包括(1)建立四旋翼无人机的动力学模型;(2)构造分数阶PID控制器,将无人机期望位置与实际位置输入分数阶PID控制器,获取无人机在X、Y、Z轴方向上的控制输出;(3)根据步骤(2)获取控制输出与当前姿态角解算出无人机的期望姿态角;(4)确定姿态误差;(5)构造分数阶终端滑模面并获得该分数阶终端滑模的等效控制律;(6)设计分数阶终端滑模切换控制律,结合切换控制律与等效控制律获得分数阶终端滑模姿态控制器;(7)设计李雅普诺夫函数并通过李

四旋翼无人机分数阶PID控制研究的开题报告.docx
四旋翼无人机分数阶PID控制研究的开题报告一、选题背景及意义近年来,无人机技术得到了快速发展,成为了航空领域中最重要的发展方向之一。其中,四旋翼无人机因其简单的结构、灵活的机动性和稳定的飞行特性而受到了广泛应用。但是,在飞行控制方面,四旋翼无人机飞行时存在机体姿态控制精度低、飞行稳定性差、悬停稳定性差等问题,这些问题在实际应用中会导致飞机无法正常使用或受控飞行性能下降,因此,研究四旋翼无人机飞行控制方案具有重要的理论和实践意义。PID控制器是常用的控制技术之一,但传统的PID控制器参数的设定通常基于满足二

四旋翼飞行器的基于PID姿态控制算法的设计与实现.docx
四旋翼飞行器的基于PID姿态控制算法的设计与实现四旋翼飞行器的基于PID姿态控制算法的设计与实现摘要:随着无人机技术的快速发展,四旋翼飞行器作为一种常见的无人机类型,受到了广泛关注。姿态控制是四旋翼飞行器自主飞行的重要问题之一。本文主要介绍了基于PID(比例-积分-微分)姿态控制算法的设计与实现,该算法通过对四旋翼飞行器姿态误差进行反馈控制,实现飞行器的稳定悬停和精确控制。首先,介绍了四旋翼飞行器的结构和运动模型。然后,详细阐述了PID算法的原理和控制策略。最后,通过实际飞行实验验证了该算法的有效性和可行