
基于分数阶PID滑模变结构的逆变器控制研究.pptx

快乐****蜜蜂


1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于分数阶PID滑模变结构的逆变器控制研究.pptx
汇报人:目录PARTONEPARTTWO分数阶微积分简介滑模变结构控制原理分数阶PID滑模变结构控制算法PARTTHREE逆变器工作原理逆变器控制目标逆变器控制策略实现PARTFOUR控制算法在逆变器中的实现控制算法的仿真验证控制算法在实际系统中的应用PARTFIVE实验设置与实验过程实验结果展示结果分析PARTSIX研究结论研究不足与展望THANKYOU

基于滑模变结构光伏并网逆变器控制研究.docx
基于滑模变结构光伏并网逆变器控制研究基于滑模变结构光伏并网逆变器控制研究摘要:随着全球能源需求的迅速增长和环境保护的意识提高,光伏发电逐渐成为主流的可再生能源之一。然而,光伏发电系统的不稳定性以及并网逆变器的运行效率成为制约其大规模应用的关键问题。本文提出了一种基于滑模变结构的光伏并网逆变器控制策略,通过设计一个具有多个滑模面的滑模控制器,实现了光伏并网逆变器的高稳定性和高效率运行。关键词:光伏发电;并网逆变器;滑模变结构;控制策略;稳定性1.引言近年来,全球能源需求的快速增长和环境问题的日益严重引发人们

基于分数阶PID与重复控制逆变器优化方法研究.docx
基于分数阶PID与重复控制逆变器优化方法研究基于分数阶PID与重复控制的逆变器优化方法研究摘要:近年来,逆变器在能源转换和电力控制系统中得到广泛应用。为了提高逆变器的性能和稳定性,需要探索新的控制方法和优化算法。本论文针对逆变器的控制问题,提出了一种基于分数阶PID与重复控制的优化方法。首先,介绍了逆变器的基本原理和控制框架。然后,详细介绍了分数阶PID控制器和重复控制器的原理和应用。接着,提出了一种基于分数阶PID与重复控制的逆变器优化方法,并进行了仿真实验验证。最后,对优化方法的性能进行了分析,并展望
基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法.pdf
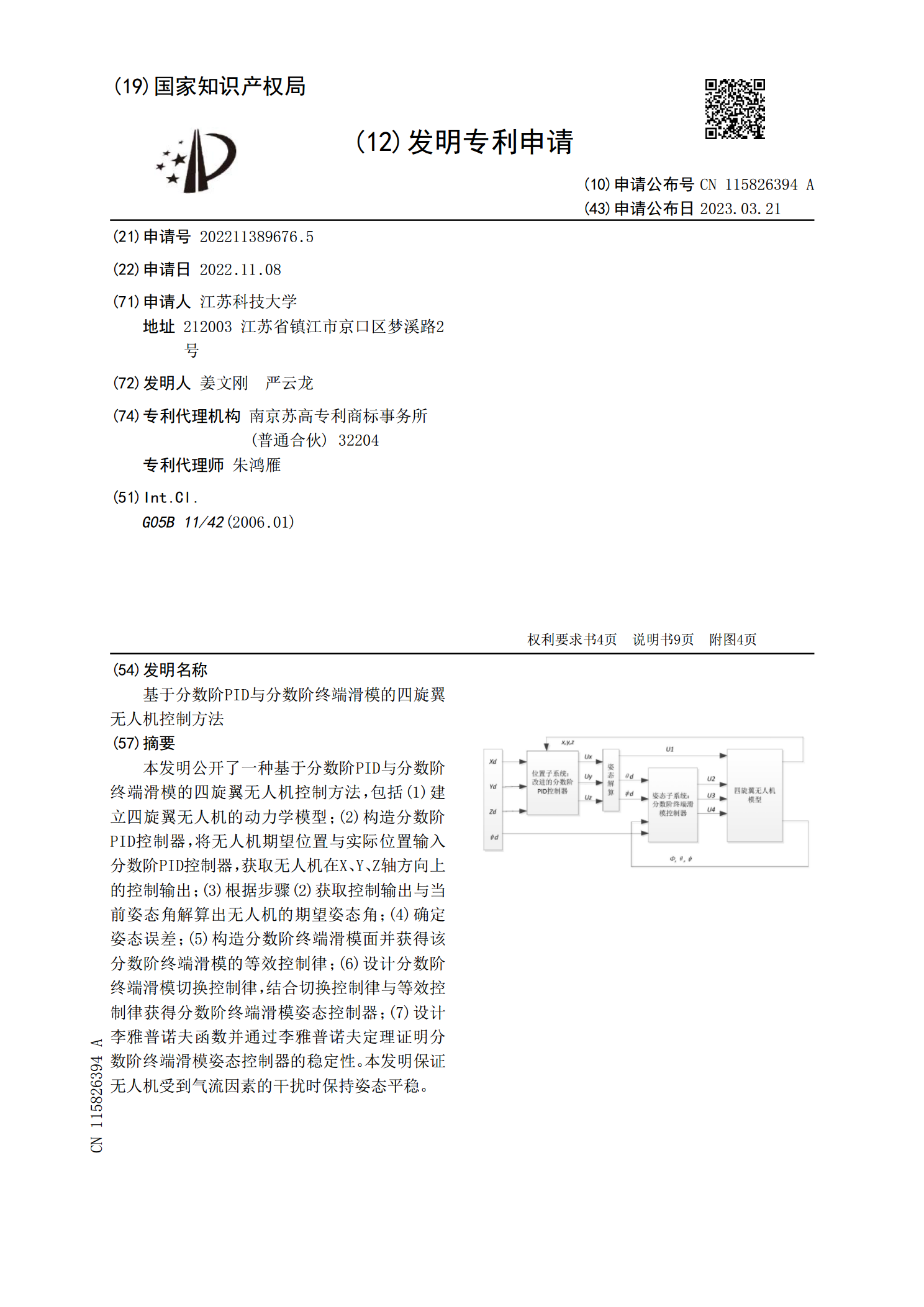
本发明公开了一种基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法,包括(1)建立四旋翼无人机的动力学模型;(2)构造分数阶PID控制器,将无人机期望位置与实际位置输入分数阶PID控制器,获取无人机在X、Y、Z轴方向上的控制输出;(3)根据步骤(2)获取控制输出与当前姿态角解算出无人机的期望姿态角;(4)确定姿态误差;(5)构造分数阶终端滑模面并获得该分数阶终端滑模的等效控制律;(6)设计分数阶终端滑模切换控制律,结合切换控制律与等效控制律获得分数阶终端滑模姿态控制器;(7)设计李雅普诺夫函数并通过李

基于粒子群优化的分数阶PID滑模控制参数整定.docx
基于粒子群优化的分数阶PID滑模控制参数整定标题:基于粒子群优化的分数阶PID滑模控制参数的整定摘要:随着现代控制理论的发展,控制器参数的整定成为了研究的热点。本论文针对分数阶PID滑模控制器的参数整定问题进行研究,提出了一种基于粒子群优化的方法。首先分析了分数阶PID滑模控制器的原理和特点,然后介绍了粒子群优化算法的基本原理,最后利用该算法对控制器的参数进行优化。在数值仿真中,通过与传统方法的对比,验证了该方法在控制器参数整定中的有效性和高效性。关键词:粒子群优化、分数阶PID滑模控制、参数整定第一章引