
一种连杆式爬杆机器人.pdf

Th****84

1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种连杆式爬杆机器人.pdf
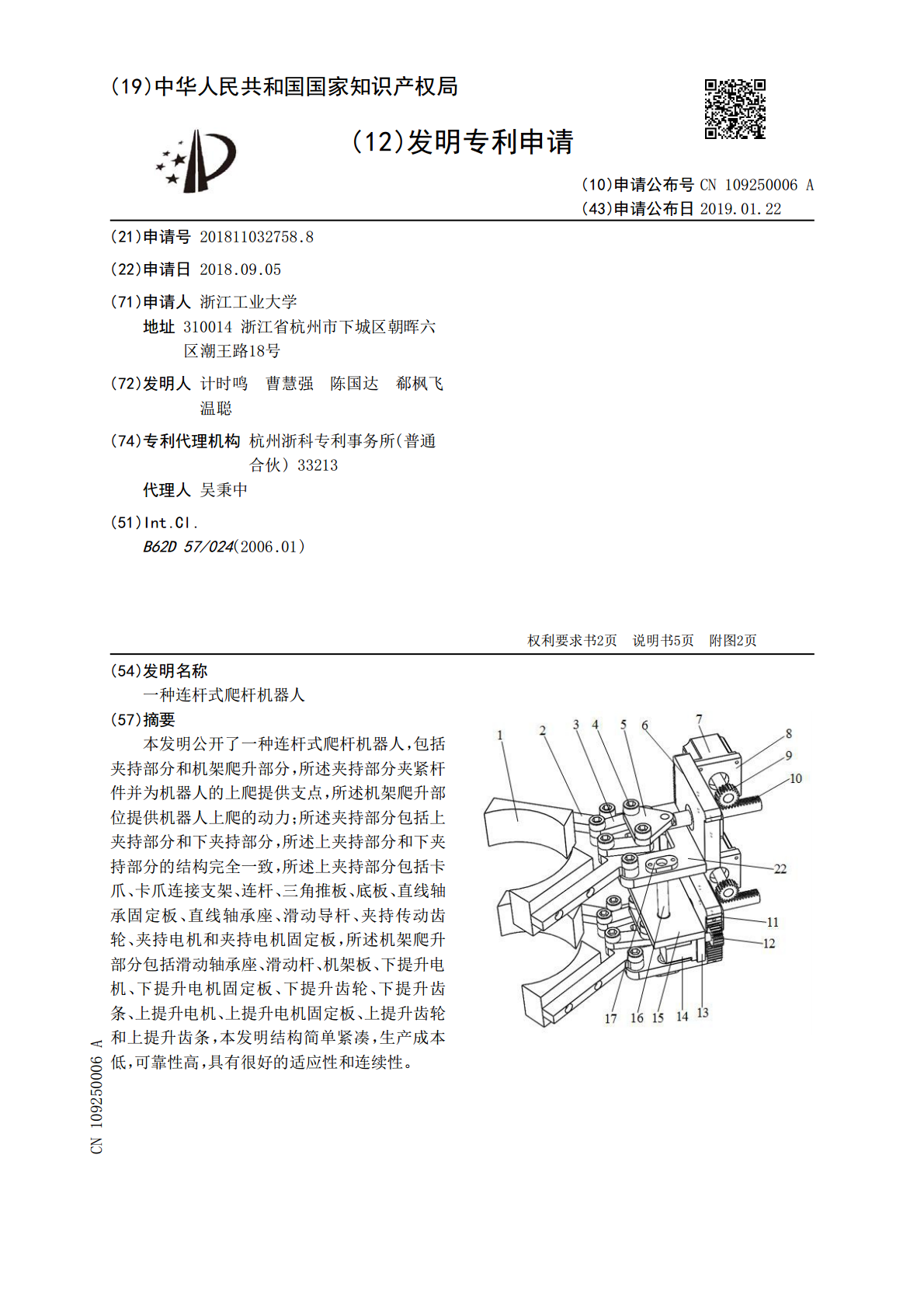
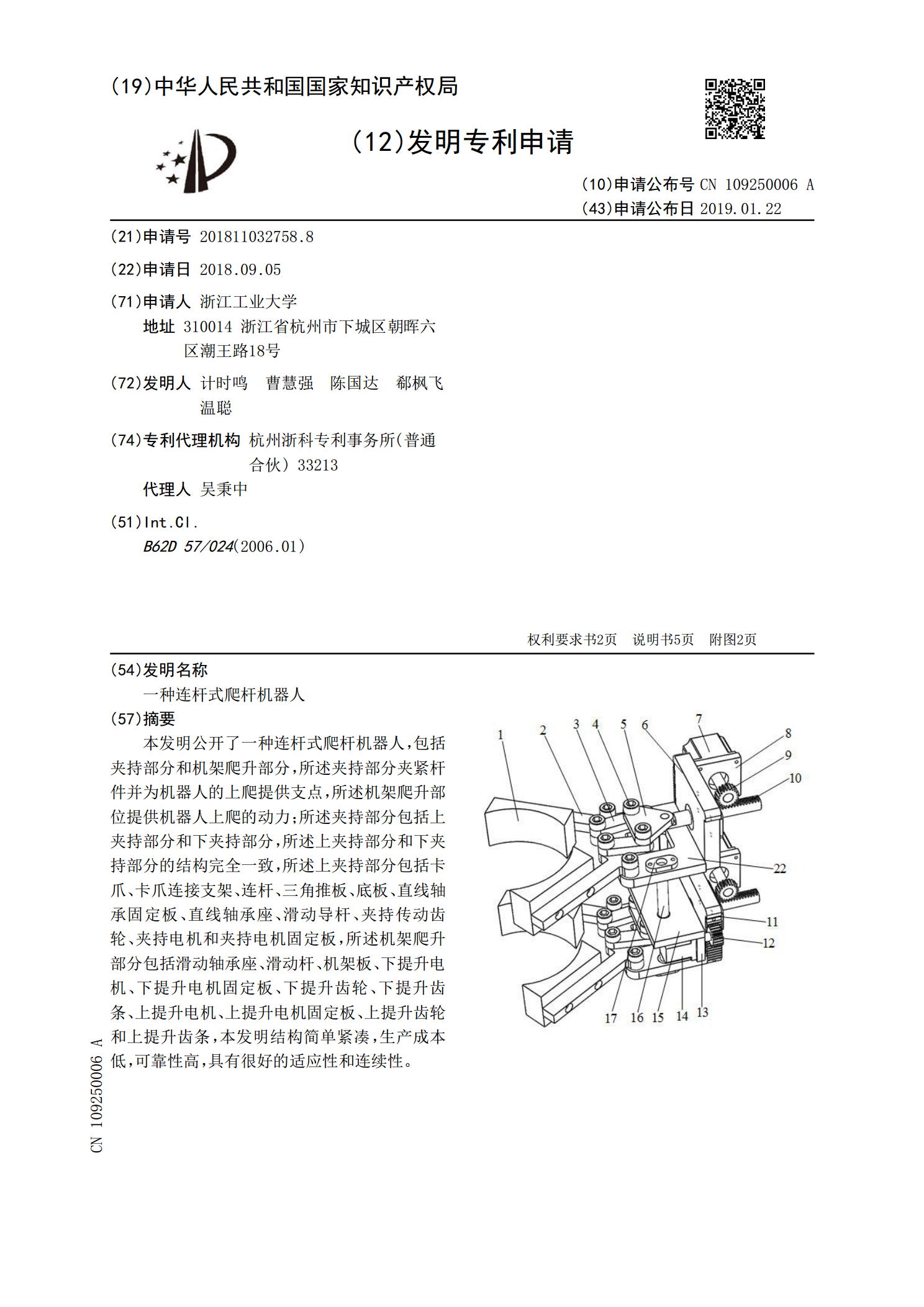
本发明公开了一种连杆式爬杆机器人,包括夹持部分和机架爬升部分,所述夹持部分夹紧杆件并为机器人的上爬提供支点,所述机架爬升部位提供机器人上爬的动力;所述夹持部分包括上夹持部分和下夹持部分,所述上夹持部分和下夹持部分的结构完全一致,所述上夹持部分包括卡爪、卡爪连接支架、连杆、三角推板、底板、直线轴承固定板、直线轴承座、滑动导杆、夹持传动齿轮、夹持电机和夹持电机固定板,所述机架爬升部分包括滑动轴承座、滑动杆、机架板、下提升电机、下提升电机固定板、下提升齿轮、下提升齿条、上提升电机、上提升电机固定板、上提升齿轮和
一种爬杆机器人.pdf
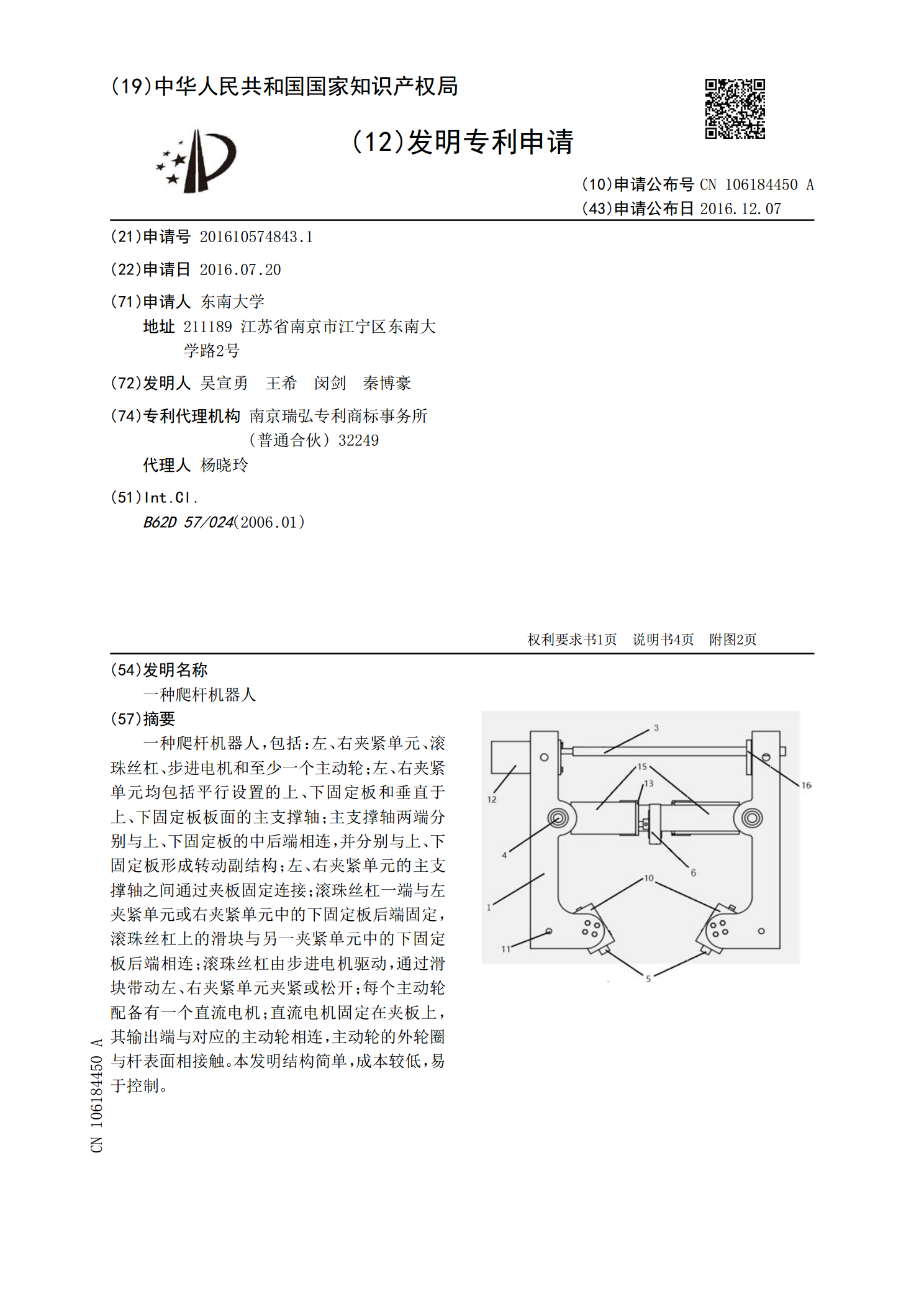
一种爬杆机器人,包括:左、右夹紧单元、滚珠丝杠、步进电机和至少一个主动轮;左、右夹紧单元均包括平行设置的上、下固定板和垂直于上、下固定板板面的主支撑轴;主支撑轴两端分别与上、下固定板的中后端相连,并分别与上、下固定板形成转动副结构;左、右夹紧单元的主支撑轴之间通过夹板固定连接;滚珠丝杠一端与左夹紧单元或右夹紧单元中的下固定板后端固定,滚珠丝杠上的滑块与另一夹紧单元中的下固定板后端相连;滚珠丝杠由步进电机驱动,通过滑块带动左、右夹紧单元夹紧或松开;每个主动轮配备有一个直流电机;直流电机固定在夹板上,其输出端
一种爬杆机器人.pdf
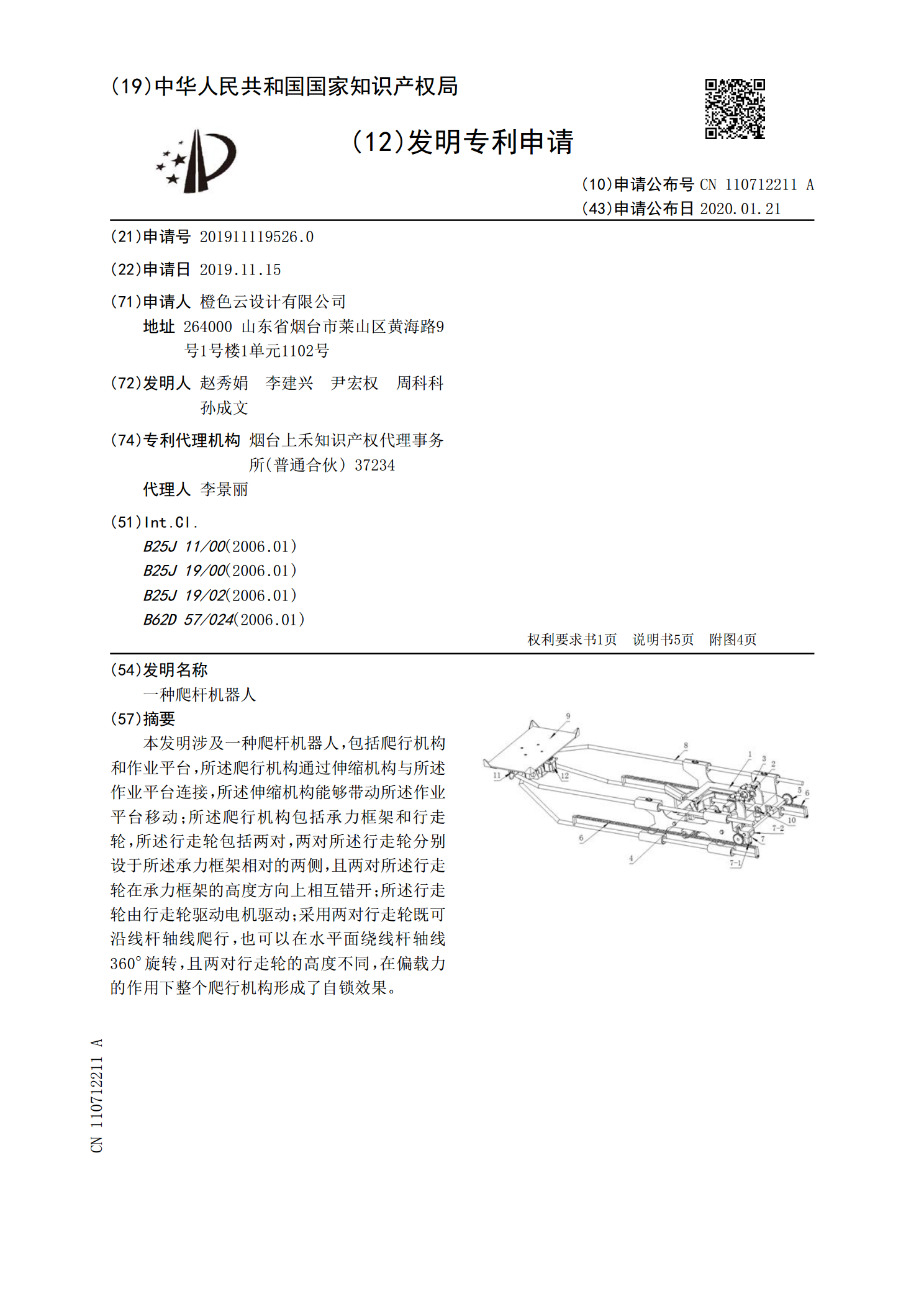
本发明涉及一种爬杆机器人,包括爬行机构和作业平台,所述爬行机构通过伸缩机构与所述作业平台连接,所述伸缩机构能够带动所述作业平台移动;所述爬行机构包括承力框架和行走轮,所述行走轮包括两对,两对所述行走轮分别设于所述承力框架相对的两侧,且两对所述行走轮在承力框架的高度方向上相互错开;所述行走轮由行走轮驱动电机驱动;采用两对行走轮既可沿线杆轴线爬行,也可以在水平面绕线杆轴线360°旋转,且两对行走轮的高度不同,在偏载力的作用下整个爬行机构形成了自锁效果。

一种爬杆机器人.pdf
本发明涉及一种爬杆机器人。爬杆机器人包括第一、第二架体,第一、第二架体上均设有行走轮机构,两个架体中的一个在其行走轮机构的两侧位置与另一个的行走轮机构的两侧位置分别通过两处连接结构对应连接,使得两个架体上的行走轮机构相对布置,且在两行走轮机构之间形成供带爬杆体穿过的容纳空间,两处连接结构中,有一处为软连接结构,有一处为可拆连接结构,两个架体的行走轮机构的两侧的侧边中的至少一个上设有调节该侧边长度的主动收缩机构。一处为软连接,通过主动收缩机构调节该侧的长度时可依靠软连接结构的设置补偿收缩的变形量,整个调节过
一种爬杆机器人.pdf
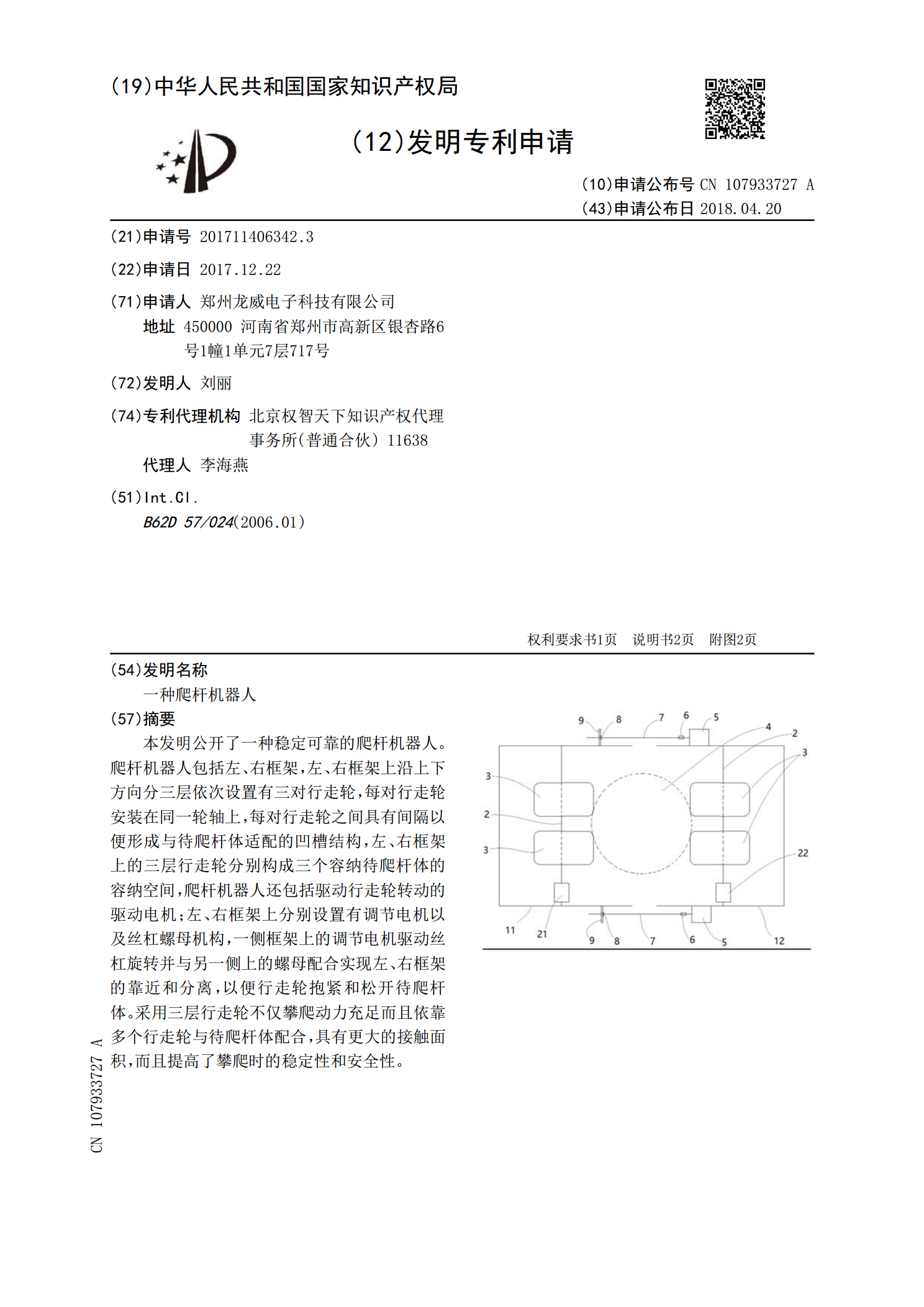
本发明公开了一种稳定可靠的爬杆机器人。爬杆机器人包括左、右框架,左、右框架上沿上下方向分三层依次设置有三对行走轮,每对行走轮安装在同一轮轴上,每对行走轮之间具有间隔以便形成与待爬杆体适配的凹槽结构,左、右框架上的三层行走轮分别构成三个容纳待爬杆体的容纳空间,爬杆机器人还包括驱动行走轮转动的驱动电机;左、右框架上分别设置有调节电机以及丝杠螺母机构,一侧框架上的调节电机驱动丝杠旋转并与另一侧上的螺母配合实现左、右框架的靠近和分离,以便行走轮抱紧和松开待爬杆体。采用三层行走轮不仅攀爬动力充足而且依靠多个行走轮与