
机器人臂与外科手术探针的集成.pdf

书生****aa


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共66页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人臂与外科手术探针的集成.pdf
本公开的实施例提供了用于将探针耦合到器械设备操纵器(例如,机器人臂)的改进的方法和装置。在一些实施例中,可以由手持件承载的探针被配置成耦合到机器人臂的设备操纵器的端部。可以提供一种传动装置,该传动装置被配置成耦合到探针并且还耦合到器械设备操纵器。该传动装置可被配置成接收来自器械设备操纵器的运动输入,并将运动输入变换成探针的运动。该传动装置可以提供改进的探针的移动。通过减少手持件和探针上的部件数量,手持件和探针可以作为无菌的、一次性使用的消耗品设备提供,并且传动装置可以重复使用。

外科手术操作臂及外科手术机器人.pdf
本发明公开了一种外科手术操作臂,包括支架组件、至少一个运动组件、弯曲驱动组件和内窥镜。支架组件包括前、后支撑座,以及通过支撑杆连接至前支撑座的弯曲组件,其中,所述弯曲组件包括与所述支撑杆相连的后端构件,以及通过转轴与所述后端构件可枢转地依次连接的中间构件和前端构件。每个运动组件均包括平行设置的多个传动组件。传动组件的弹性丝杆可滑动地穿过分别开设在前端构件、中间构件和后端构件中的第一通孔。弯曲驱动组件的驱动绳可滑动地穿过分别开设在前端构件和中间构件的第二通孔,并且固定连接至后端构件。驱动绳适于驱动前端构件、

外科手术导引探针.pdf
一种用于识别患者的解剖区域内的位置的导引探针。导引探针可以可选地包括:可抓握部分、插入部分和发射器。插入部分可以联接至可抓握部分。插入部分可以具有长形范围和纵向轴线。插入部分可以包括挠性部段和弯曲部段。弯曲部段可以定位在挠性部段的远端。发射器可以联接至插入部分的远端端部部分。发射器可以构造成用于在解剖区域内使用以发射可以在患者体外被检测的信号,由此,信号能够使解剖区域内的位置在体外被识别以用于待应用的疗法。
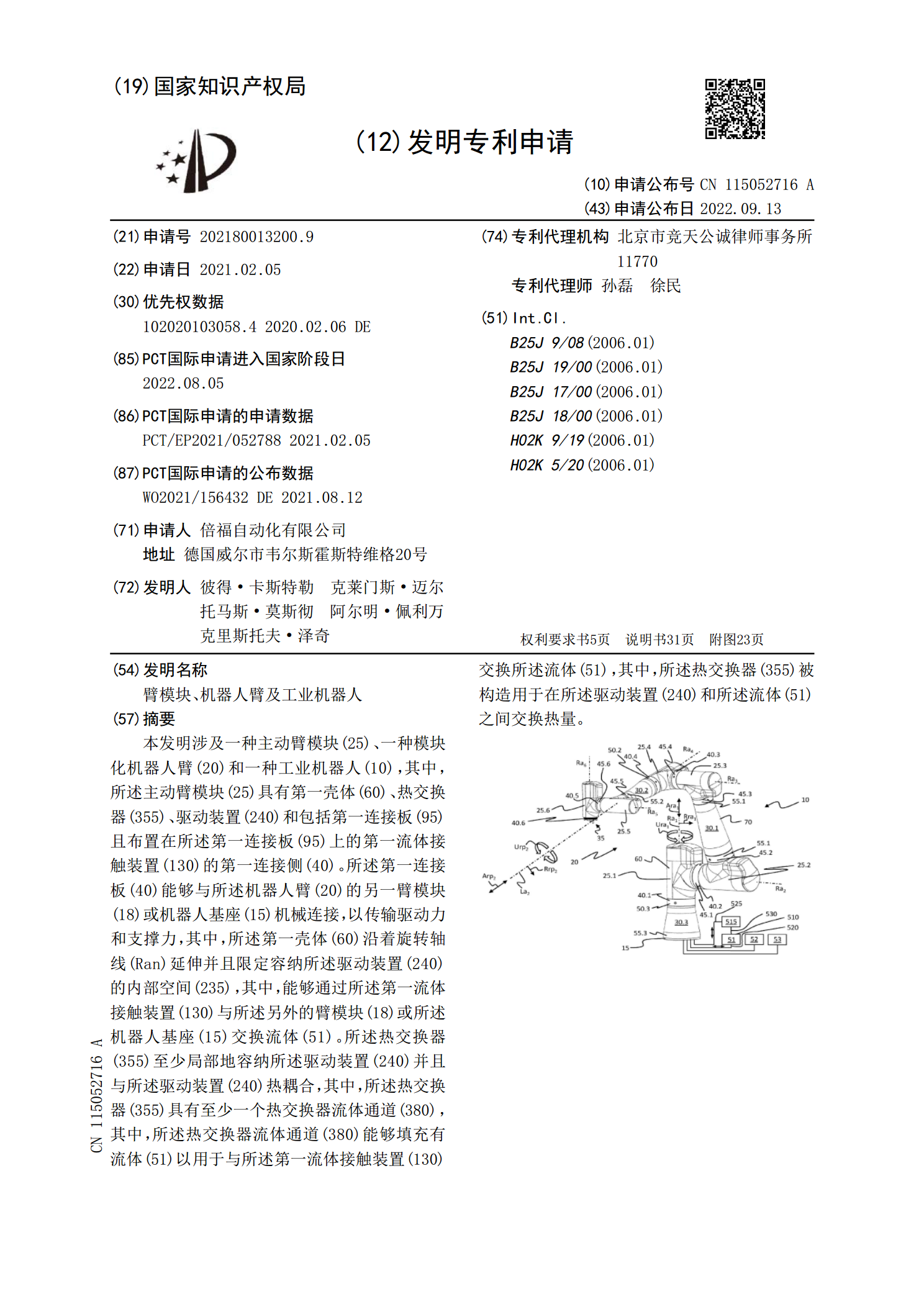
臂模块、机器人臂及工业机器人.pdf
本发明涉及一种主动臂模块(25)、一种模块化机器人臂(20)和一种工业机器人(10),其中,所述主动臂模块(25)具有第一壳体(60)、热交换器(355)、驱动装置(240)和包括第一连接板(95)且布置在所述第一连接板(95)上的第一流体接触装置(130)的第一连接侧(40)。所述第一连接板(40)能够与所述机器人臂(20)的另一臂模块(18)或机器人基座(15)机械连接,以传输驱动力和支撑力,其中,所述第一壳体(60)沿着旋转轴线(Ran)延伸并且限定容纳所述驱动装置(240)的内部空间(235),其
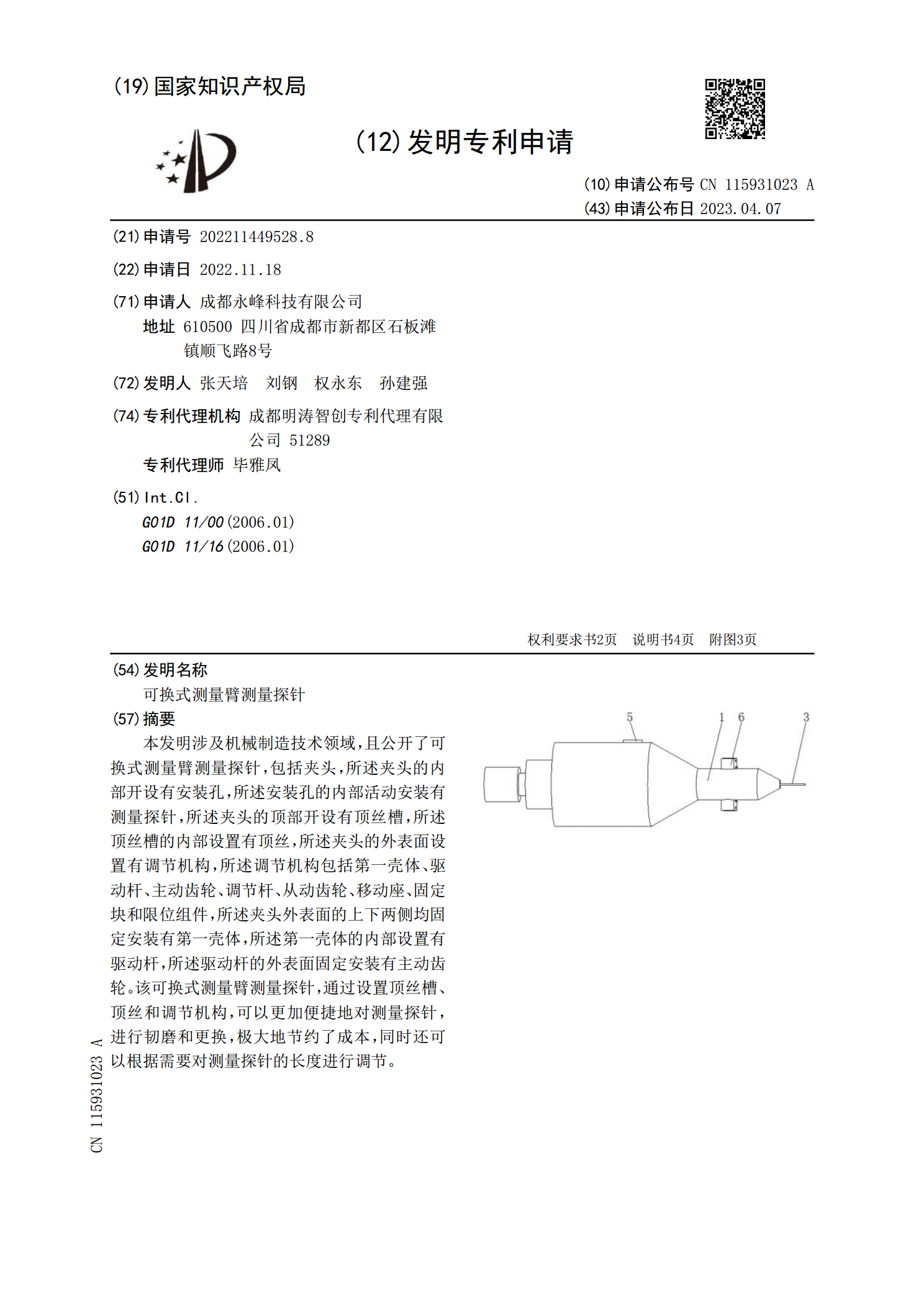
可换式测量臂测量探针.pdf
本发明涉及机械制造技术领域,且公开了可换式测量臂测量探针,包括夹头,所述夹头的内部开设有安装孔,所述安装孔的内部活动安装有测量探针,所述夹头的顶部开设有顶丝槽,所述顶丝槽的内部设置有顶丝,所述夹头的外表面设置有调节机构,所述调节机构包括第一壳体、驱动杆、主动齿轮、调节杆、从动齿轮、移动座、固定块和限位组件,所述夹头外表面的上下两侧均固定安装有第一壳体,所述第一壳体的内部设置有驱动杆,所述驱动杆的外表面固定安装有主动齿轮。该可换式测量臂测量探针,通过设置顶丝槽、顶丝和调节机构,可以更加便捷地对测量探针,进行