
自动驾驶方法、装置及系统、计算机可读存储介质.pdf

靖烟****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动驾驶方法、装置及系统、计算机可读存储介质.pdf
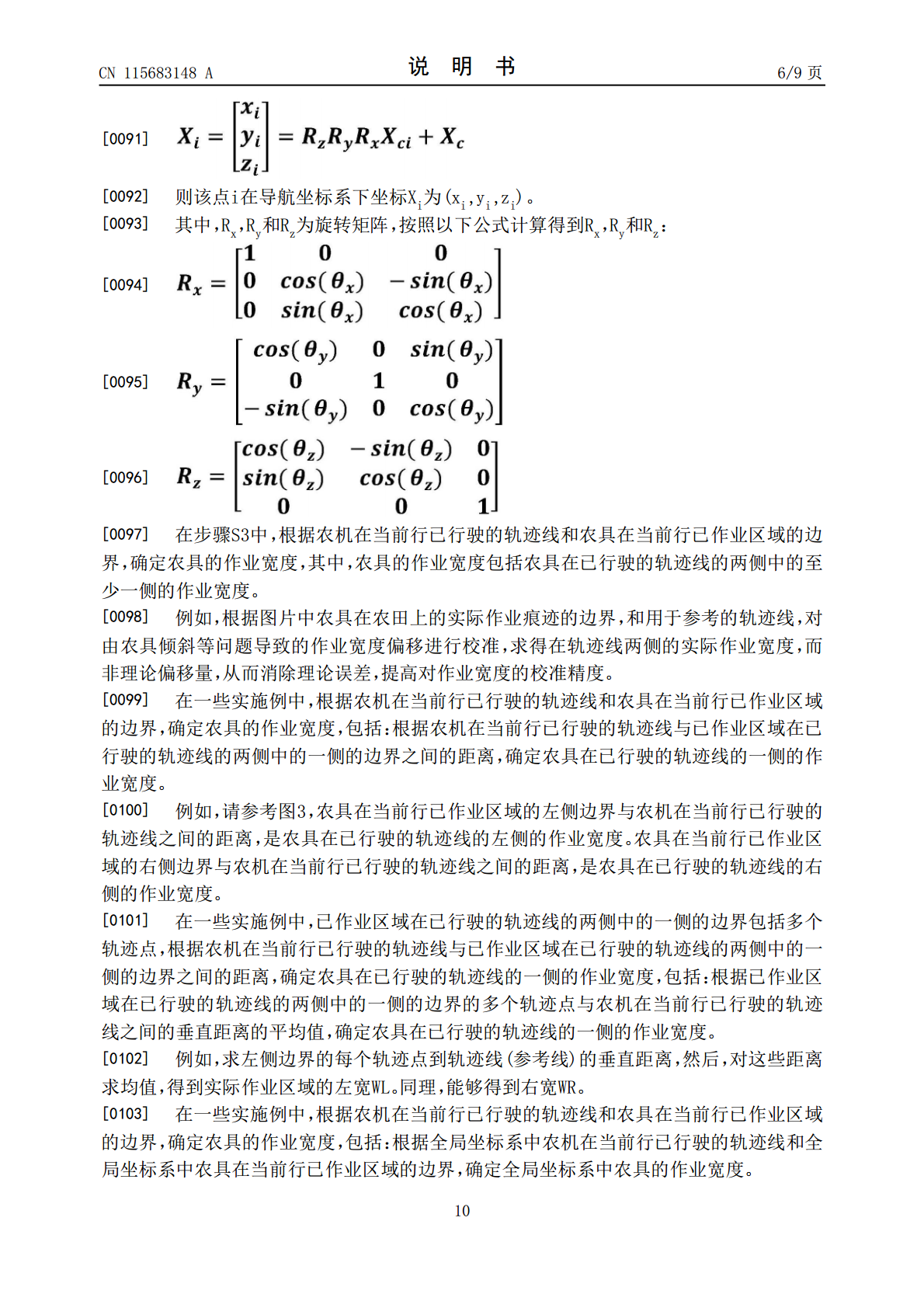
本公开涉及自动驾驶方法、装置及系统、计算机可存储介质,涉及农机自动驾驶领域。自动驾驶方法包括获取农机在当前行已行驶的轨迹线和与所述农机连接的农具在当前行已作业区域的图像;根据所述农具在当前行已作业区域的图像,确定所述农具在当前行已作业区域的边界;根据所述农机在当前行已行驶的轨迹线和所述农具在当前行已作业区域的边界,确定所述农具的作业宽度,所述农具的作业宽度包括农具在所述已行驶的轨迹线的两侧中的至少一侧的作业宽度;根据所述农具的作业宽度,以及当前行和下一行之间的留白间距,确定农机在下一行的行驶轨迹线与在当前
用于自动驾驶的方法、装置和计算机可读存储介质.pdf
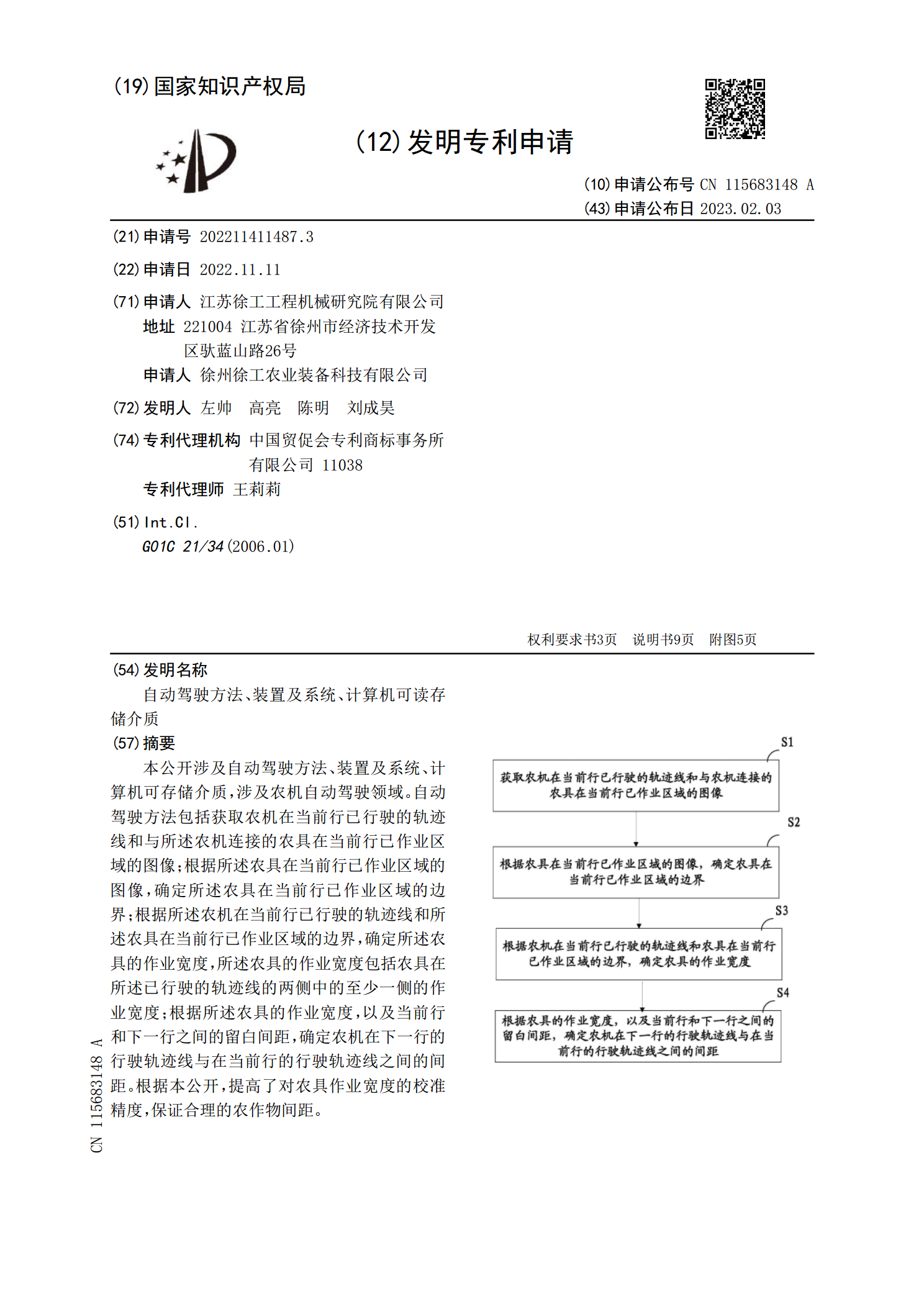
本公开的实施例涉及用于自动驾驶的方法、装置和计算机可读存储介质。该方法包括:获取与车辆相关的多个候选出口的多组出口特征,每个候选出口是与所述车辆的可行驶路线相关联的道路的一部分;确定所述车辆相对于所述多个候选出口的多组车辆特征,每组车辆特征至少包括所述车辆相对于所述多个候选出口中的相应候选出口的运动状态;以及基于所述多组出口特征和所述多组车辆特征,从所述多个候选出口中确定与所述车辆的行驶路线匹配的出口。该方法将目标高阶意图预测抽象为目标与出口匹配问题,可以适配各种路口场景,具有良好的泛化性能。
自动驾驶方法、装置、电子设备及计算机可读存储介质.pdf
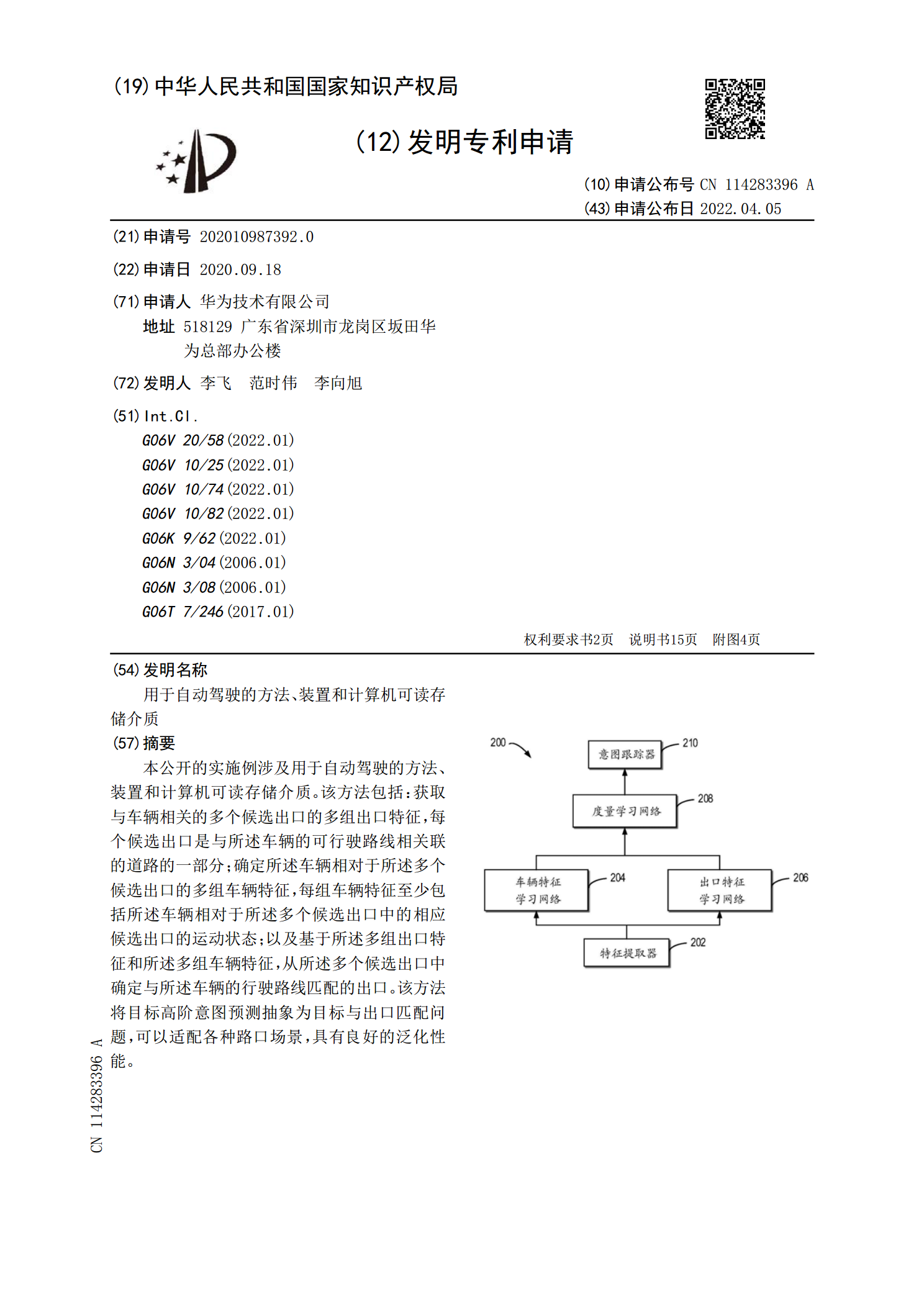
本发明实施例涉及汽车技术领域,公开了一种自动驾驶方法,该方法包括:通过获取语音信息,在预设的信息模板库中获取与该语音信息相匹配的目标信息模板,进而根据匹配到的目标信息模板、语音信息以及地图导航信息,生成对应的路径规划信息,并且根据路径规划信息生成对应语音信息的驾驶执行指令,基于生成的驾驶执行指令来控制车辆执行相匹配的驾驶操作。应用本发明的技术方案,能够在不调动原有地图预存信息的情况下,将采集到的语音指令转化为地图信息,从而控制通过智能驾驶系统进行辅助驾驶,提高了智能驾驶系统控制的灵活性和智能性。本发明还提
焊接方法、系统、装置及计算机可读存储介质.pdf
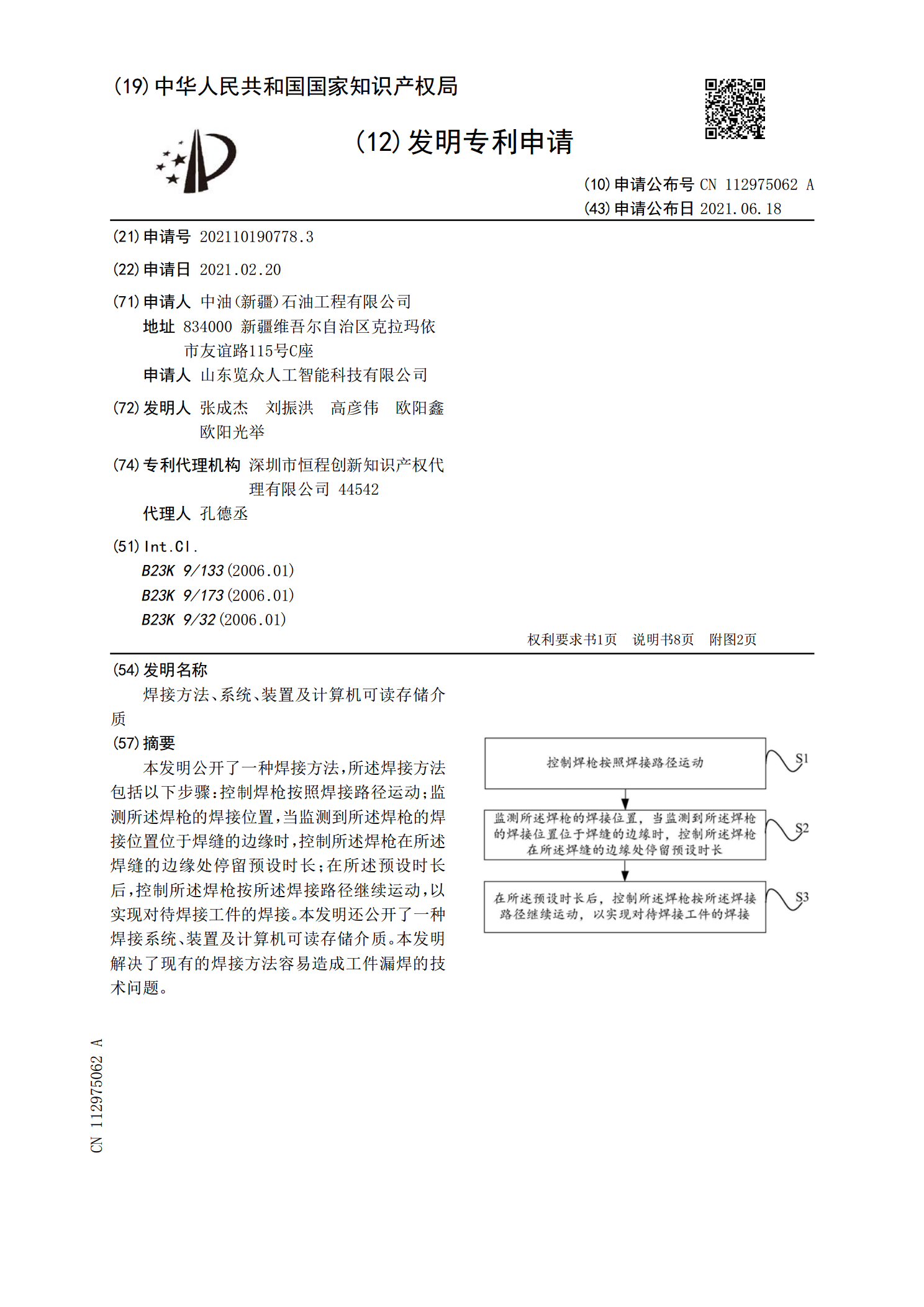
本发明公开了一种焊接方法,所述焊接方法包括以下步骤:控制焊枪按照焊接路径运动;监测所述焊枪的焊接位置,当监测到所述焊枪的焊接位置位于焊缝的边缘时,控制所述焊枪在所述焊缝的边缘处停留预设时长;在所述预设时长后,控制所述焊枪按所述焊接路径继续运动,以实现对待焊接工件的焊接。本发明还公开了一种焊接系统、装置及计算机可读存储介质。本发明解决了现有的焊接方法容易造成工件漏焊的技术问题。
培训方法、装置、系统与计算机可读存储介质.pdf
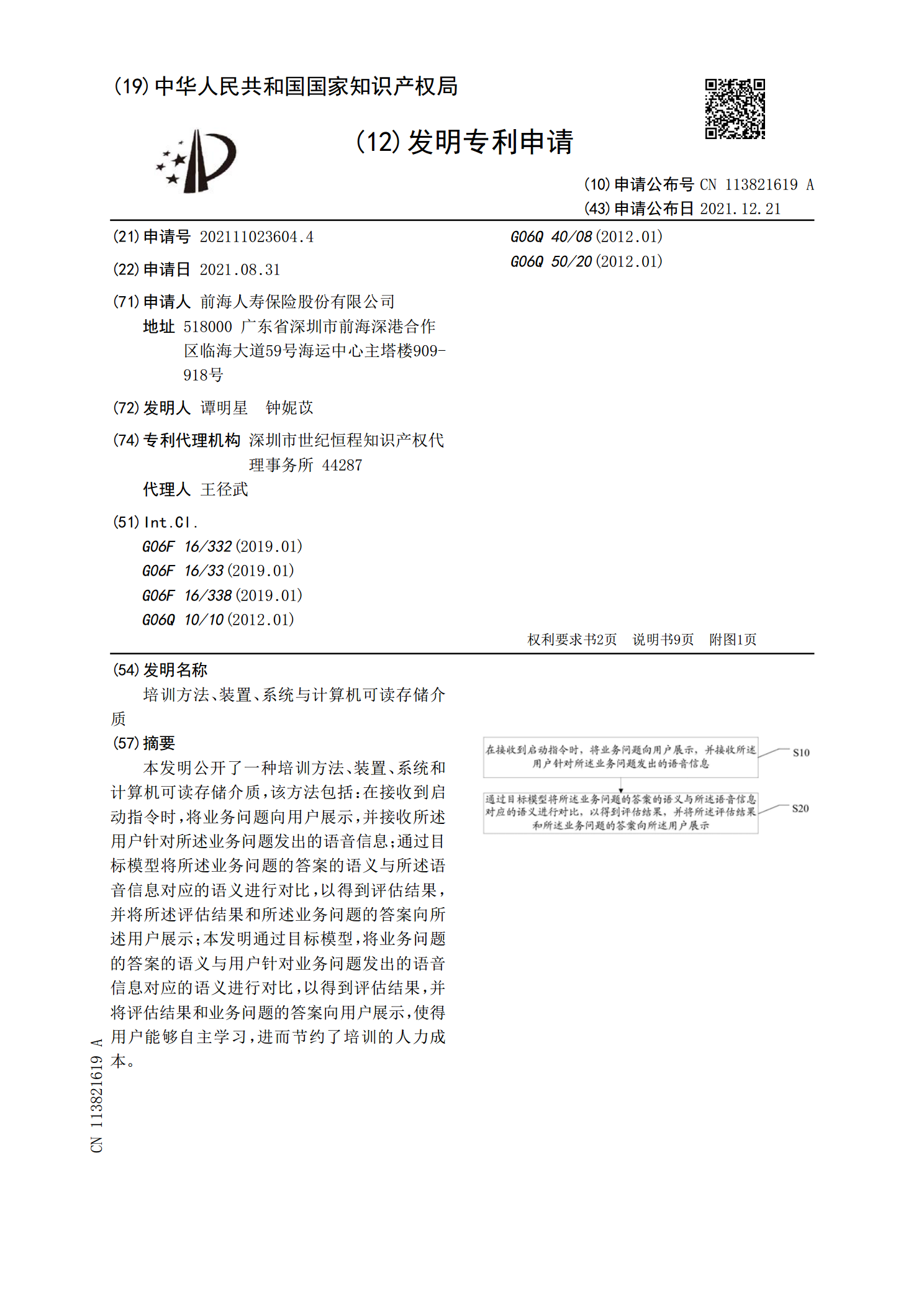
本发明公开了一种培训方法、装置、系统和计算机可读存储介质,该方法包括:在接收到启动指令时,将业务问题向用户展示,并接收所述用户针对所述业务问题发出的语音信息;通过目标模型将所述业务问题的答案的语义与所述语音信息对应的语义进行对比,以得到评估结果,并将所述评估结果和所述业务问题的答案向所述用户展示;本发明通过目标模型,将业务问题的答案的语义与用户针对业务问题发出的语音信息对应的语义进行对比,以得到评估结果,并将评估结果和业务问题的答案向用户展示,使得用户能够自主学习,进而节约了培训的人力成本。