
一种船舶复杂结构机器人智能焊接方法及系统.pdf

斌斌****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种船舶复杂结构机器人智能焊接方法及系统.pdf
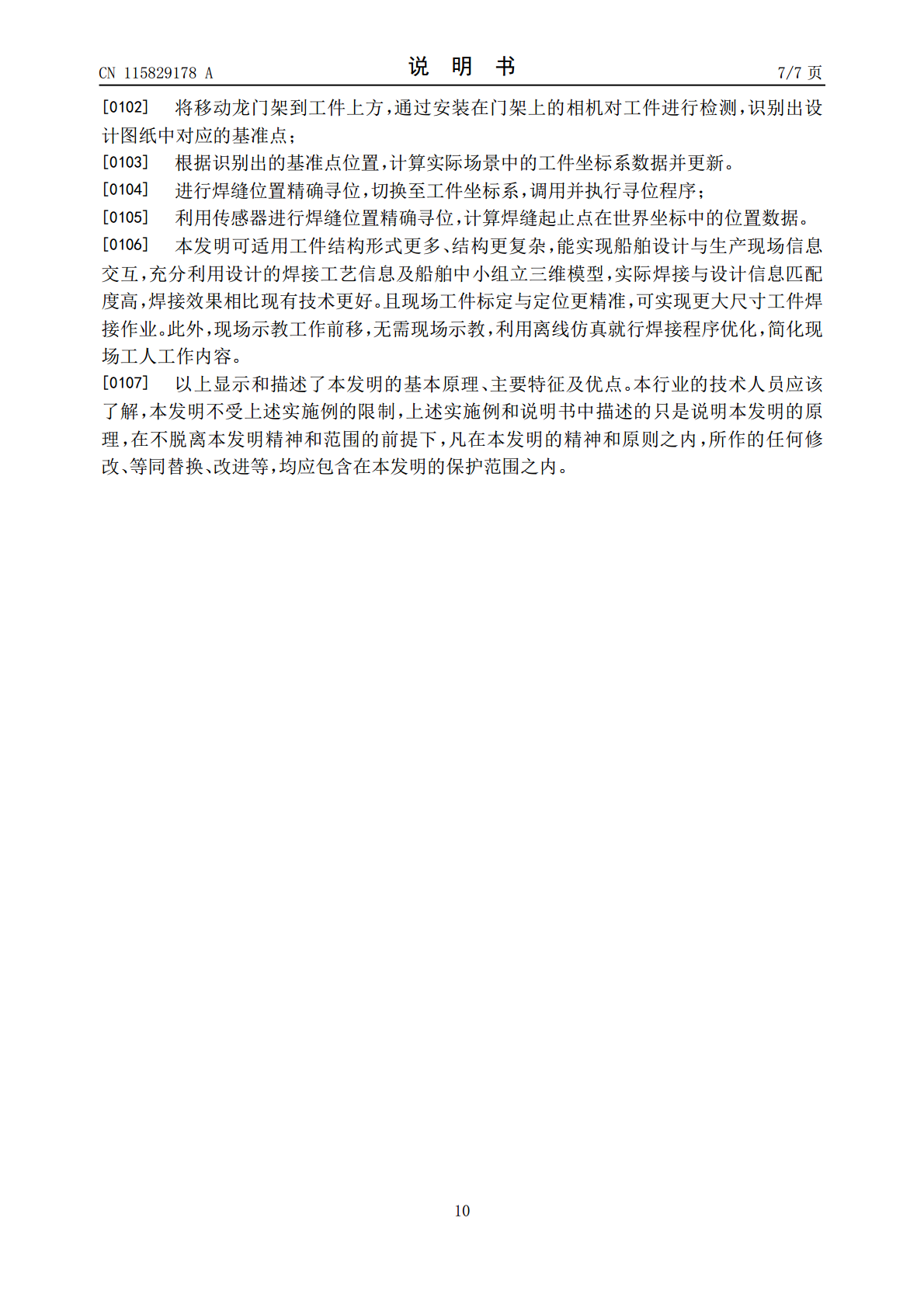
本发明公开了一种船舶复杂结构机器人智能焊接方法及系统,方法包括以下步骤:对导入的船舶设计文件进行处理,提取焊缝信息数据并生成可处理的三维模型;通过提取的焊缝信息,基于工艺规则或路径最优算法完成多机器人焊接任务分配;机器人根据分配到的焊接任务,通过索引焊缝类型及工艺要求,生成机器人仿真程序;对生成的程序进行仿真验证,若存在运动干涉,进入三维仿真环境进行轨迹调整,直至无运动干涉;将程序下发至机器人,并移动龙门架进行工件坐标系标定;移动机器人进行焊缝位置精确定位;开始焊接作业。本发明可以实现多机器人焊接任务自主
船舶小组立复杂结构智能焊接装备应用方案.pptx
汇报人:目录PARTONEPARTTWO船舶小组立复杂结构智能焊接装备的定义船舶小组立复杂结构智能焊接装备的应用范围船舶小组立复杂结构智能焊接装备的优势PARTTHREE智能焊接技术原理船舶小组立复杂结构智能焊接装备工作流程船舶小组立复杂结构智能焊接装备技术特点PARTFOUR船舶小组立复杂结构智能焊接装备选型船舶小组立复杂结构智能焊接装备安装与调试船舶小组立复杂结构智能焊接装备使用和维护船舶小组立复杂结构智能焊接装备故障排除与维修PARTFIVE应用案例一:某大型船舶制造企业应用实例应用案例二:某中型船
一种用于船舶舱室的智能焊接机器人.pdf
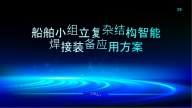
本发明公开了一种用于船舶舱室的智能焊接机器人,包括焊接机器人、焊枪、焊缝识别与跟踪传感器、高度测距仪、焊接送丝机、焊接丝盘、清枪剪丝器、移动平台、系统总控台、机器人升降底座、拼接轨道、可调支腿等。所述拼接轨道采用模块化设计,多个拼接轨道之间可以方便地实现快速插接与锁紧,每个拼接轨道配备有两个可调支腿,可调支腿放于船舶舱室格挡内,可根据舱室型材高度进行高低调节。本发明设计巧妙,灵活机动,成本可控,适应船舶多种类型舱室型材格挡,具有快速、高效、智能、柔性好的特点,能很好地完成舱室多分段焊缝的高精度智能焊接,大

一种船舶曲面结构的机器人焊接工艺.pdf
本发明提供一种船舶曲面结构的机器人焊接工艺,包括以下步骤:将船舶曲面结构放置于曲面胎架上;焊接工具采用气体保护焊、药芯焊丝或实芯焊丝,焊接过程进行V型或三角形摆动,摆动两侧根据焊缝间隙及焊脚大小设置停留时间;将机器人焊接参数量化;根据船舶曲面结构形状,将复杂单一曲线焊缝进行位置划分,分成不同的基本位置;将焊接位置拆分为平角焊、立角焊、平包角焊、立圆弧角焊、立曲面角焊缝和平曲面角焊缝;根据各基本位置的焊接参数,分别完成各基本位置的焊接;本发明有效解决此种曲面结构传统焊接方法导致的焊接质量不稳定,焊接效率低,
一种机器人智能化焊接系统、设备和方法.pdf
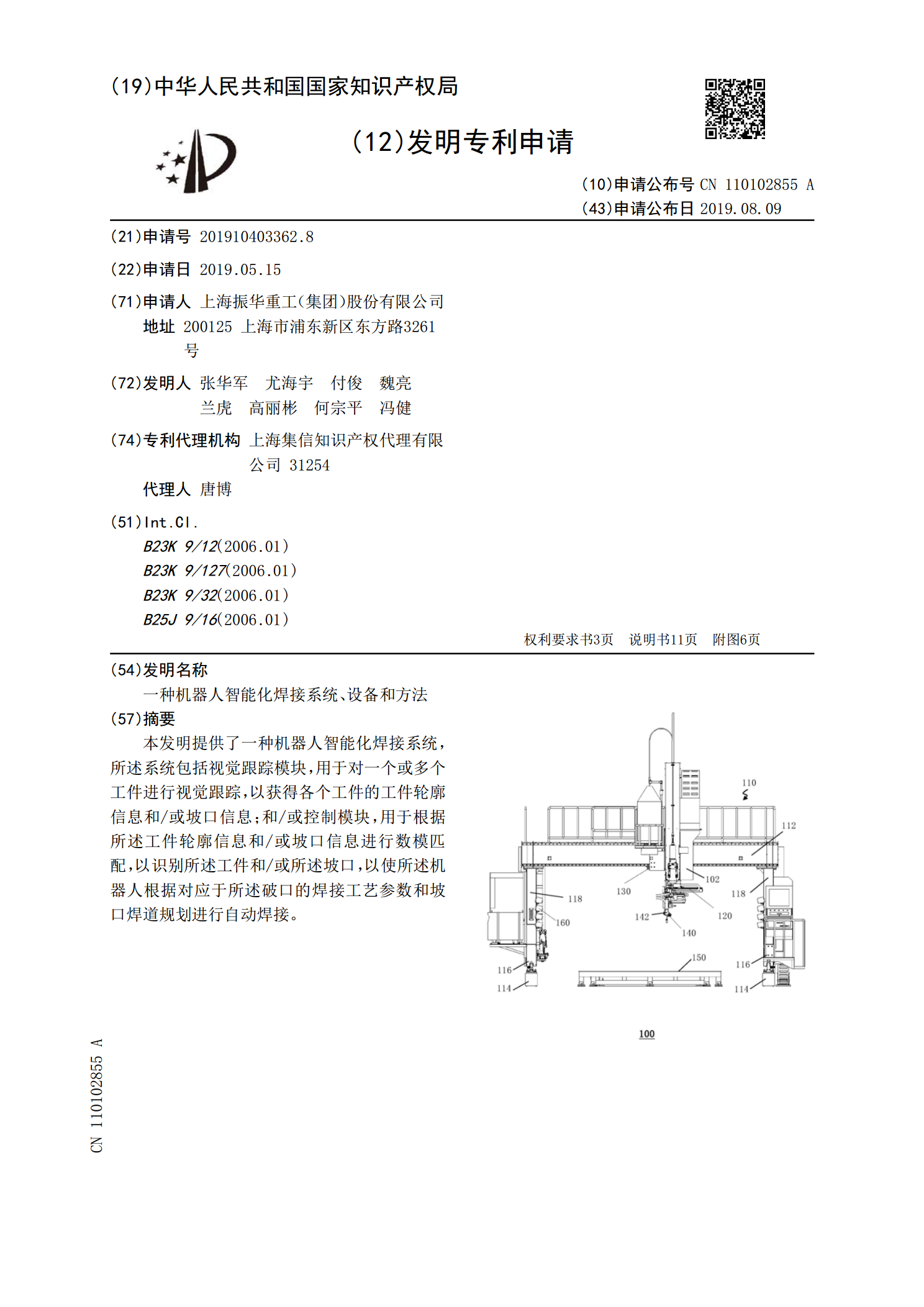
本发明提供了一种机器人智能化焊接系统,所述系统包括视觉跟踪模块,用于对一个或多个工件进行视觉跟踪,以获得各个工件的工件轮廓信息和/或坡口信息;和/或控制模块,用于根据所述工件轮廓信息和/或坡口信息进行数模匹配,以识别所述工件和/或所述坡口,以使所述机器人根据对应于所述破口的焊接工艺参数和坡口焊道规划进行自动焊接。