
一种机器人智能化焊接系统、设备和方法.pdf

骊英****bb


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人智能化焊接系统、设备和方法.pdf
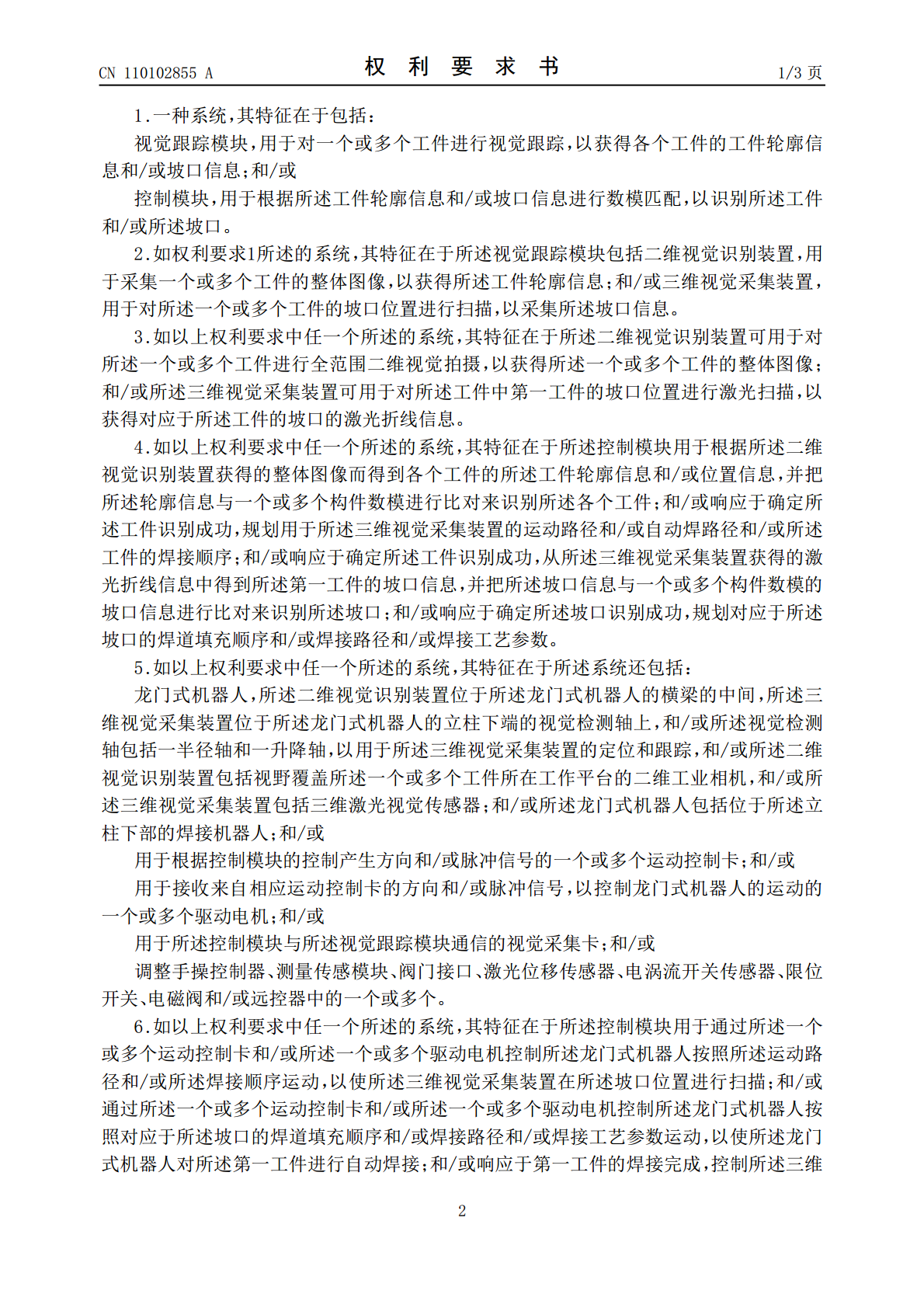
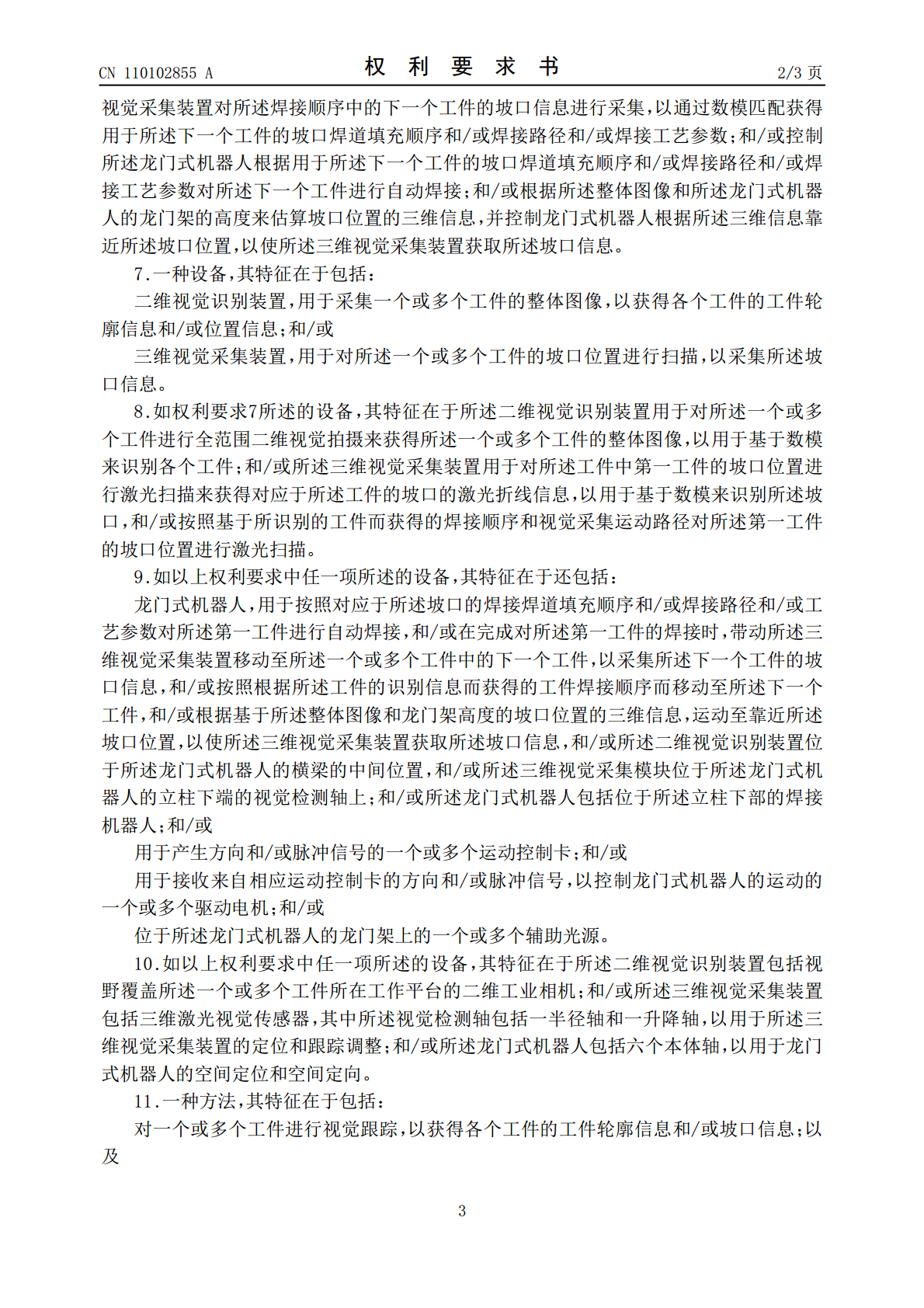
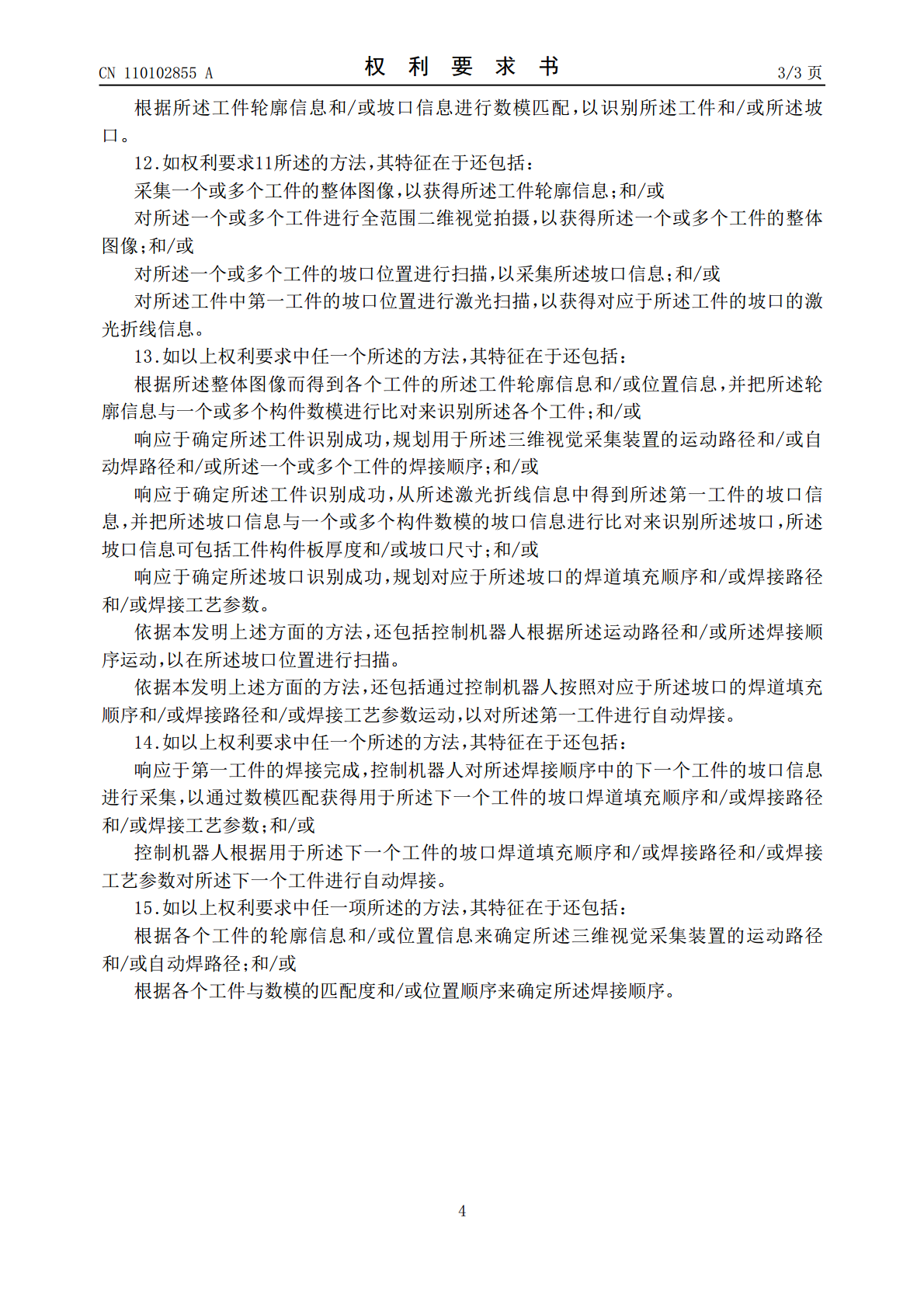
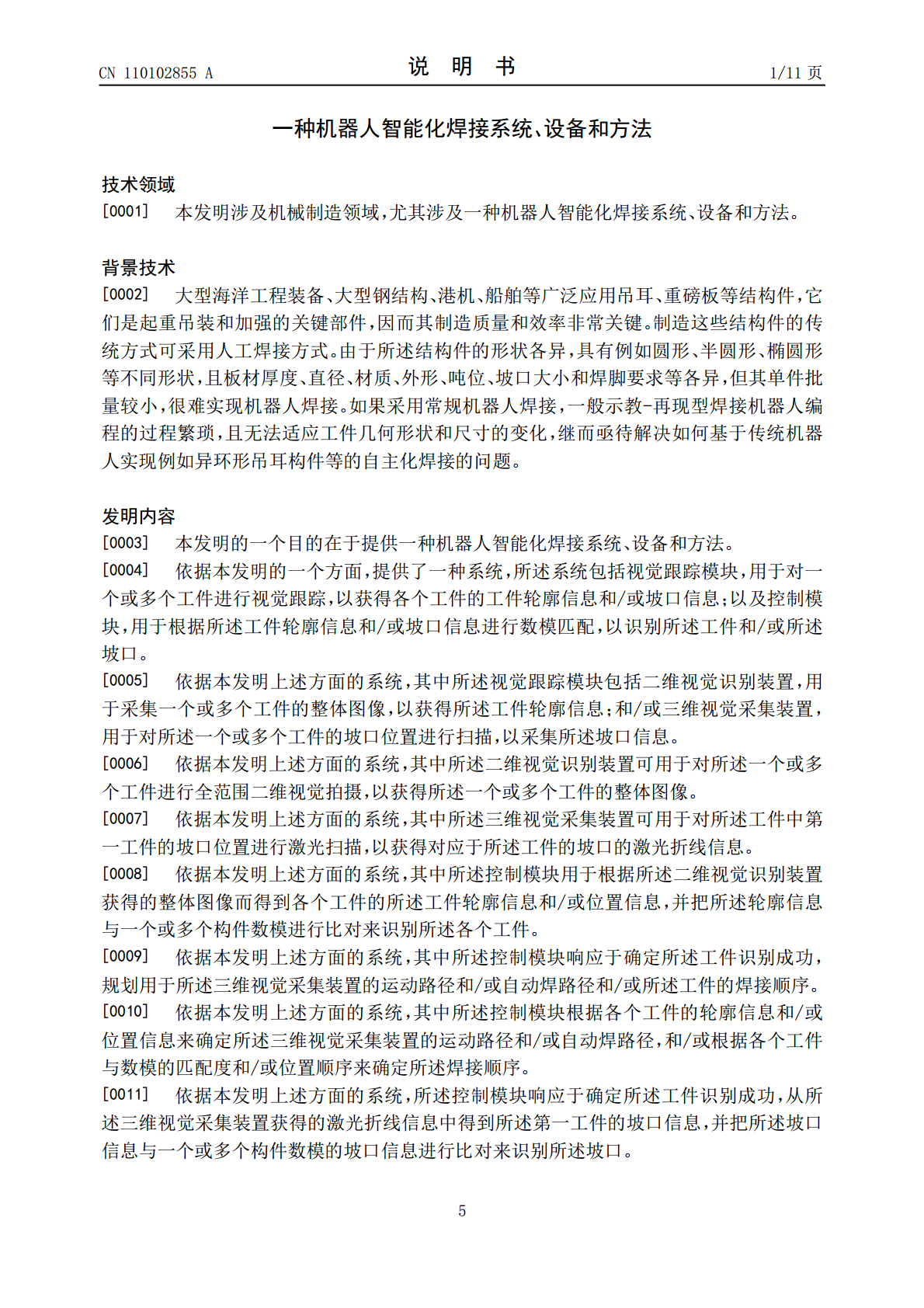
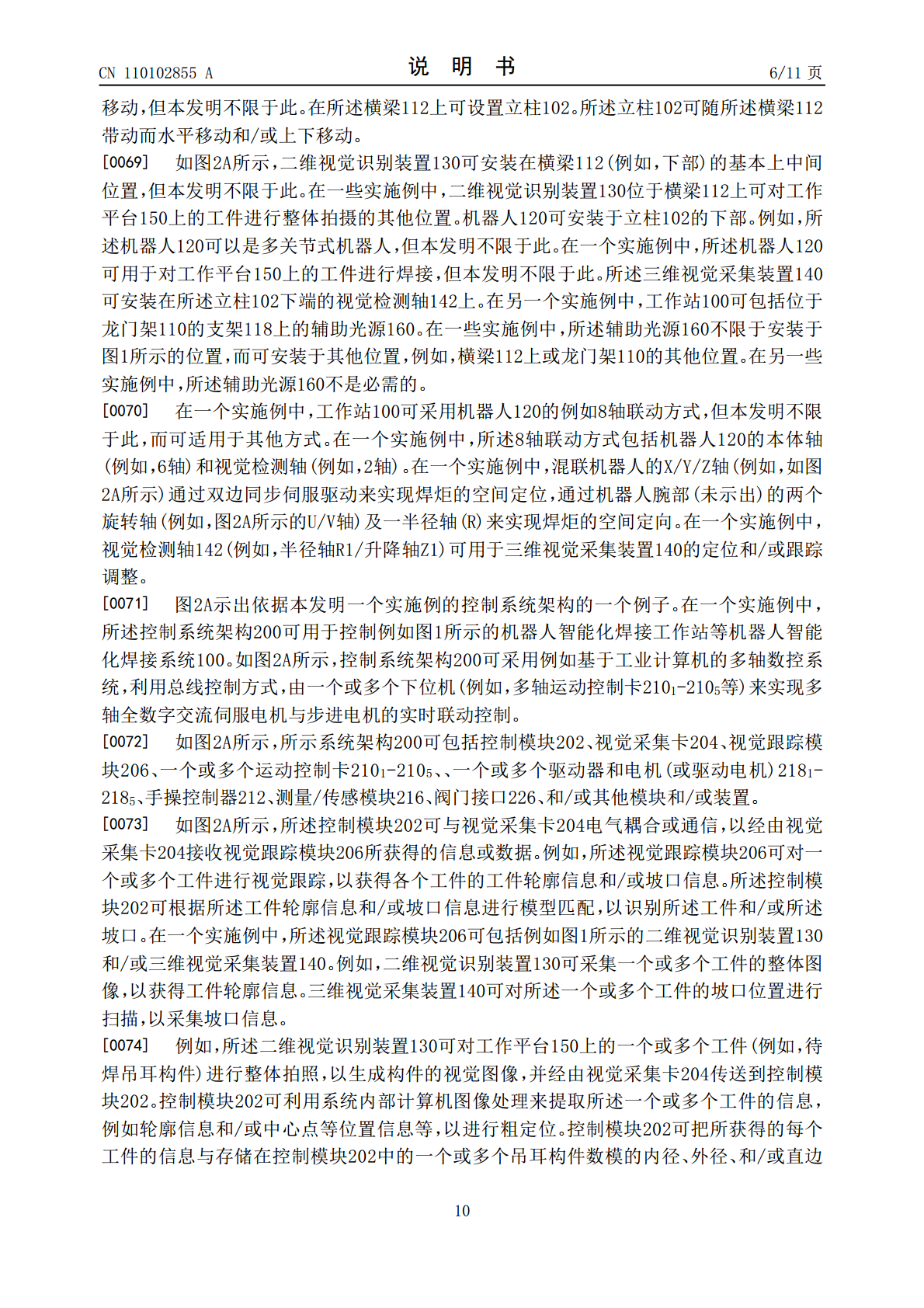
本发明提供了一种机器人智能化焊接系统,所述系统包括视觉跟踪模块,用于对一个或多个工件进行视觉跟踪,以获得各个工件的工件轮廓信息和/或坡口信息;和/或控制模块,用于根据所述工件轮廓信息和/或坡口信息进行数模匹配,以识别所述工件和/或所述坡口,以使所述机器人根据对应于所述破口的焊接工艺参数和坡口焊道规划进行自动焊接。

一种智能化输送的焊接系统及其输送方法.pdf
本发明公开了一种智能化输送的焊接系统,包括焊接机头及设置在焊接机头下方的输送轨道,在所述的输送轨道上设置有输送装置,所述的输送装置下端设置有与所述的输送轨道相配合的滚轮,所述的输送轨道中部设置有呈T形的通槽,所述的滚轮为对称设置在所述的通槽内的2个,在所述的输送装置下端设置有立杆,2个所述的滚轮分别转动连接在所述的立杆两侧,在所述的输送装置内设置有电机,所述的电机的输出轴上设置有2个齿轮,本发明通过采用输送装置沿着输送轨道,将待焊接工件输送到焊接机头下方进行焊接,操作过程中,单个待焊接工件能够单独输送,并
一种智能化短直管法兰焊接系统及方法.pdf
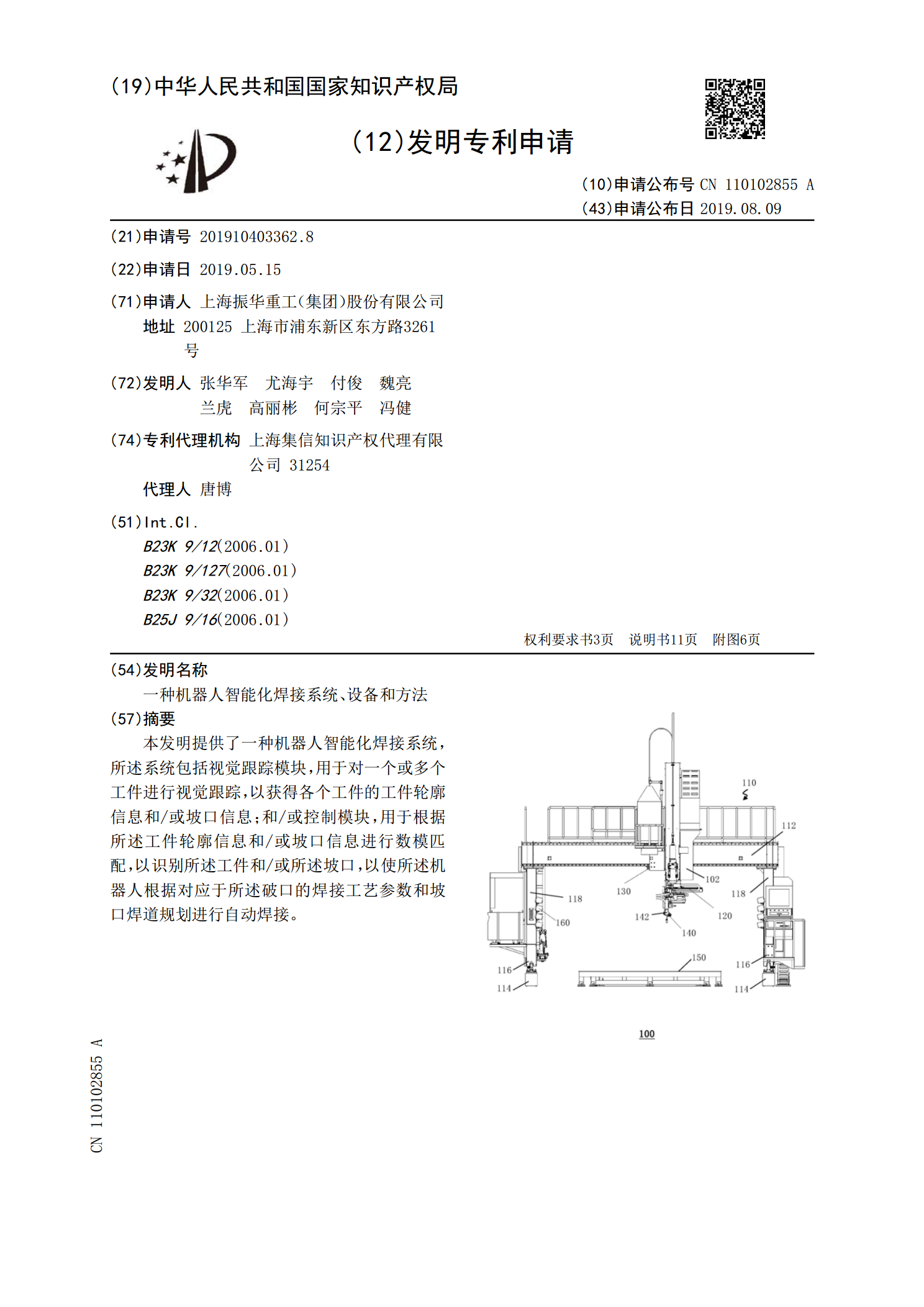
本发明提供一种智能化短直管法兰焊接系统及方法,本发明通过连续测量法兰和短直管组对间隙的大小,在测量组对间隙大小的同时获取焊缝圆周的多个特征点,通过特征点拟合出焊接轨迹,控制系统根据组对间隙大小变化不断调整焊接工艺参数,并通过拟合出的焊接轨迹控制机械臂同时完成两个变位装置上的工件焊接,有效的提高了焊接精度。本发明变位装置的卡爪采用弹性结构设计,夹紧法兰后,预留有一定的夹紧弹性行程,当法兰焊接完成后发生热形变时,弹性结构能够自适应法兰的形变,不会发生因为法兰受热型变而造成卡爪机械卡死的状态,从而达到法兰焊接完
焊接系统和焊接方法.pdf
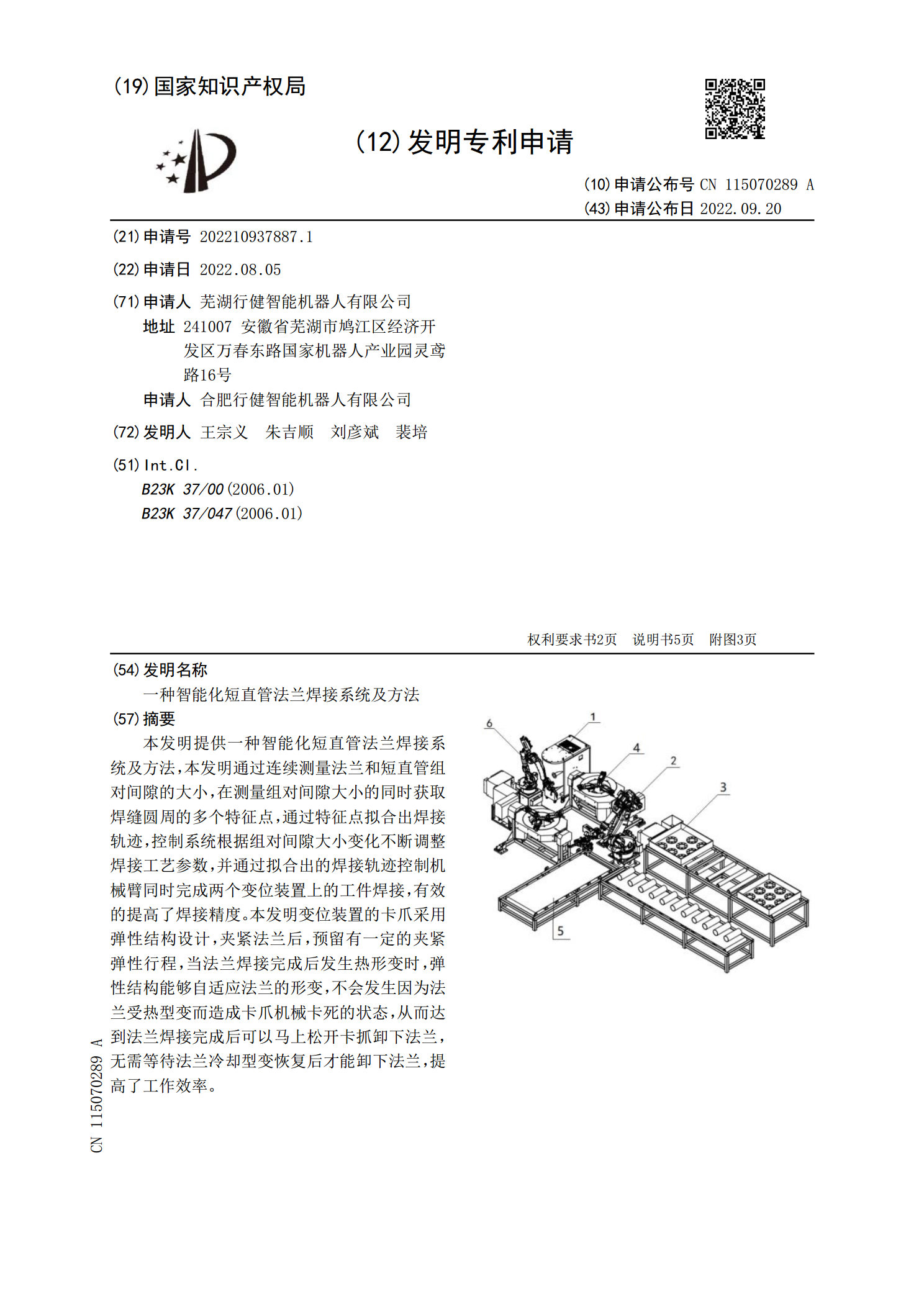
本发明涉及一种焊接系统和焊接方法,具有用于提供随周期(T)周期性变化的至少一个工艺参数(P<base:Sub>i</base:Sub>(t))的焊接电流源(1),用于指定所述至少一个工艺参数(P<base:Sub>i</base:Sub>(t))的周期(T)的工艺控制器(2),动力单元(3),以及至少一个端口(4),用于连接到用于采集工艺变量(G<base:Sub>j</base:Sub>(t))的至少一个传感器(5)和/或用于影响工艺参数(P<base:Sub>i</base:Sub>(t))的至少一个
焊接系统和焊接方法.pdf
本发明涉及一种焊接系统和焊接方法,具有用于提供随周期(T)周期性变化的至少一个工艺参数(P<base:Sub>i</base:Sub>(t))的焊接电流源(1),用于指定所述至少一个工艺参数(P<base:Sub>i</base:Sub>(t))的周期(T)的工艺控制器(2),动力单元(3),以及至少一个端口(4),用于连接到用于采集工艺变量(G<base:Sub>j</base:Sub>(t))的至少一个传感器(5)和/或用于影响工艺参数(P<base:Sub>i</base:Sub>(t))的至少一个