
一种可转向的充电基座及机器人充电系统.pdf

俊英****22

1/9
2/9

3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可转向的充电基座及机器人充电系统.pdf
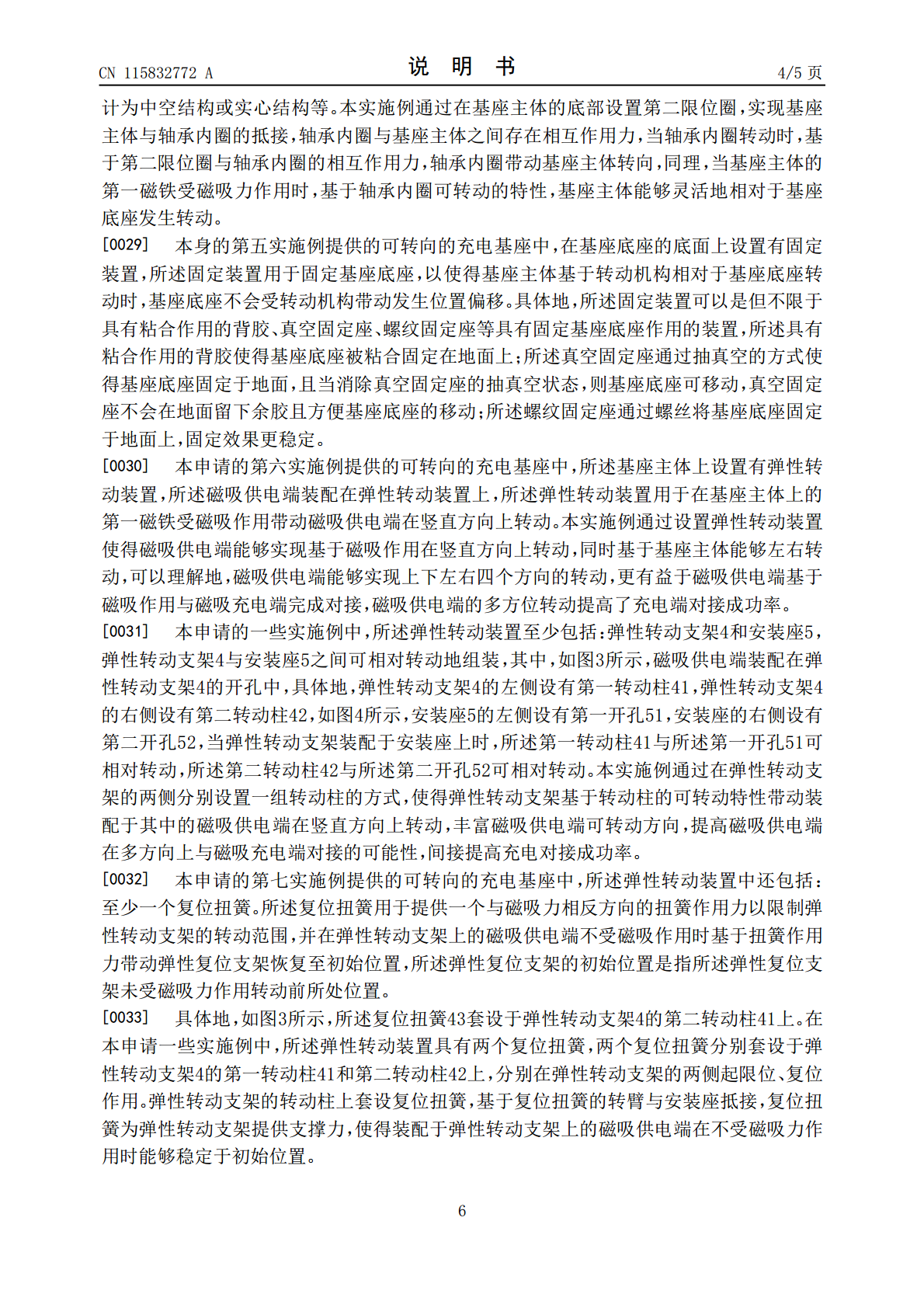
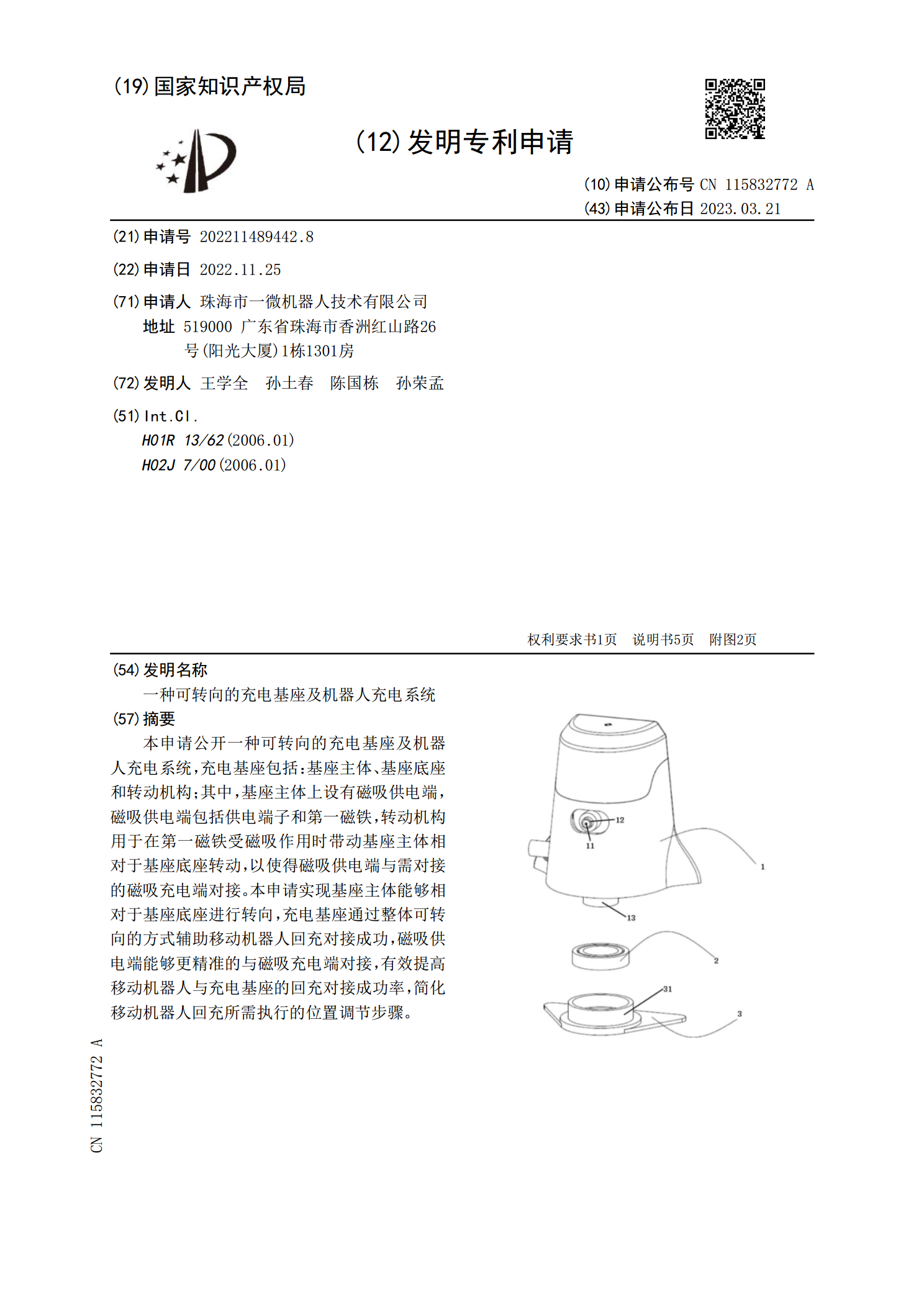
本申请公开一种可转向的充电基座及机器人充电系统,充电基座包括:基座主体、基座底座和转动机构;其中,基座主体上设有磁吸供电端,磁吸供电端包括供电端子和第一磁铁,转动机构用于在第一磁铁受磁吸作用时带动基座主体相对于基座底座转动,以使得磁吸供电端与需对接的磁吸充电端对接。本申请实现基座主体能够相对于基座底座进行转向,充电基座通过整体可转向的方式辅助移动机器人回充对接成功,磁吸供电端能够更精准的与磁吸充电端对接,有效提高移动机器人与充电基座的回充对接成功率,简化移动机器人回充所需执行的位置调节步骤。
一种智能机器人用可滑动固定的安全充电基座.pdf
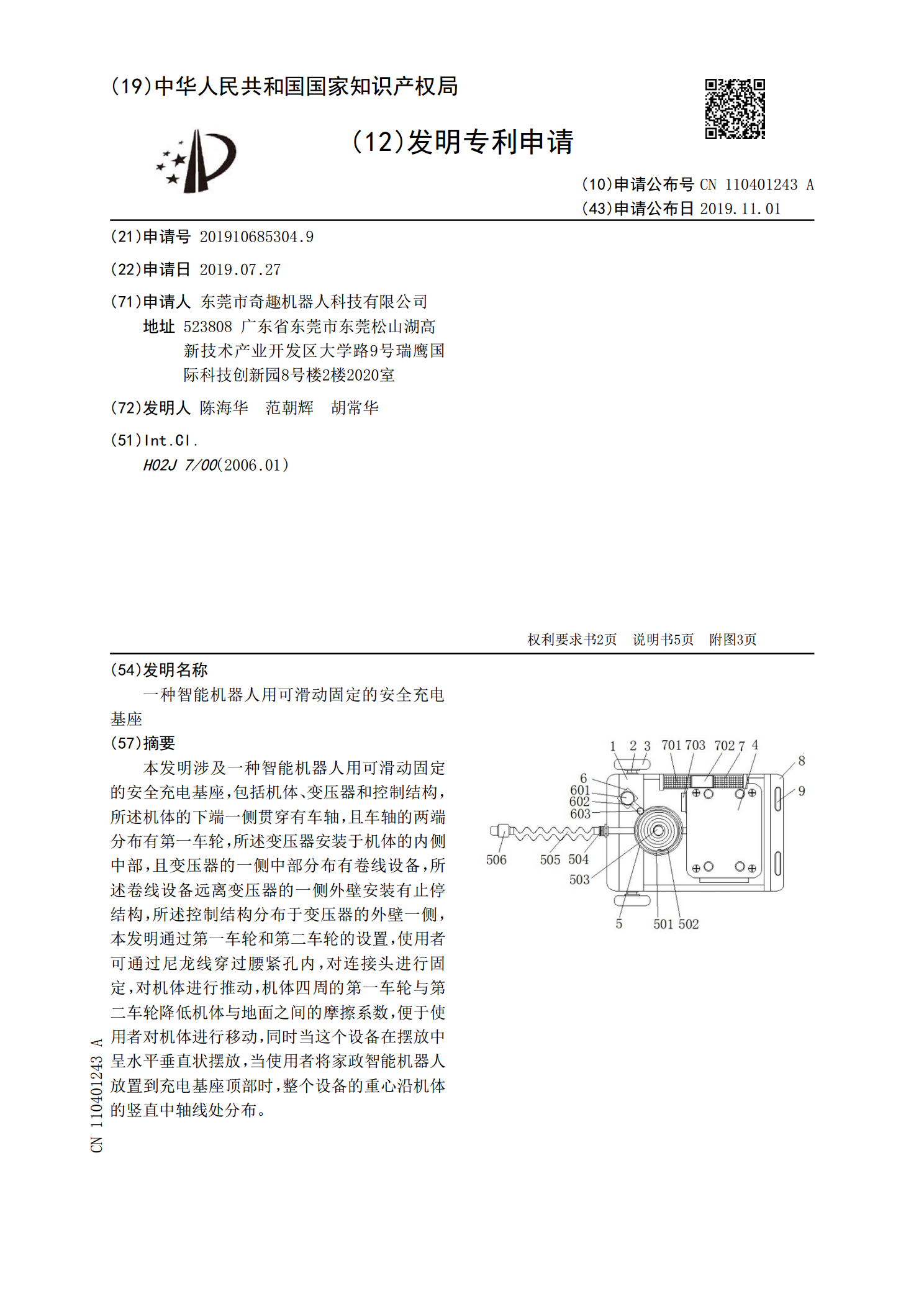
本发明涉及一种智能机器人用可滑动固定的安全充电基座,包括机体、变压器和控制结构,所述机体的下端一侧贯穿有车轴,且车轴的两端分布有第一车轮,所述变压器安装于机体的内侧中部,且变压器的一侧中部分布有卷线设备,所述卷线设备远离变压器的一侧外壁安装有止停结构,所述控制结构分布于变压器的外壁一侧,本发明通过第一车轮和第二车轮的设置,使用者可通过尼龙线穿过腰紧孔内,对连接头进行固定,对机体进行推动,机体四周的第一车轮与第二车轮降低机体与地面之间的摩擦系数,便于使用者对机体进行移动,同时当这个设备在摆放中呈水平垂直状摆

一种可转向的充电座支架.pdf
本发明公开了一种可转向的充电座支架,其包括安装支撑板、充电座、内壁基台、弹性定位夹、定位轮及防脱固定卡;所述安装支撑板设有一安装孔;所述充电座背部设有一中空的转动轴柄,且该转动轴柄具有一方形端部,所述方形端部的尾部设有用于安装防脱固定卡的卡槽;所述内壁基台固定在安装支撑板的安装孔上,且内壁基台侧边设有具有两个安装槽孔的安装槽座;所述弹性定位夹安装在内壁基台的安装槽座上;所述定位轮靠近内壁基台的一侧设有与弹性定位夹相适配定位的方形定位凸轴。本发明为一种设计巧妙独特的可转向充电座支架,其可以实现转向定位,方便
一种可移动充电的电动汽车充电系统.pdf
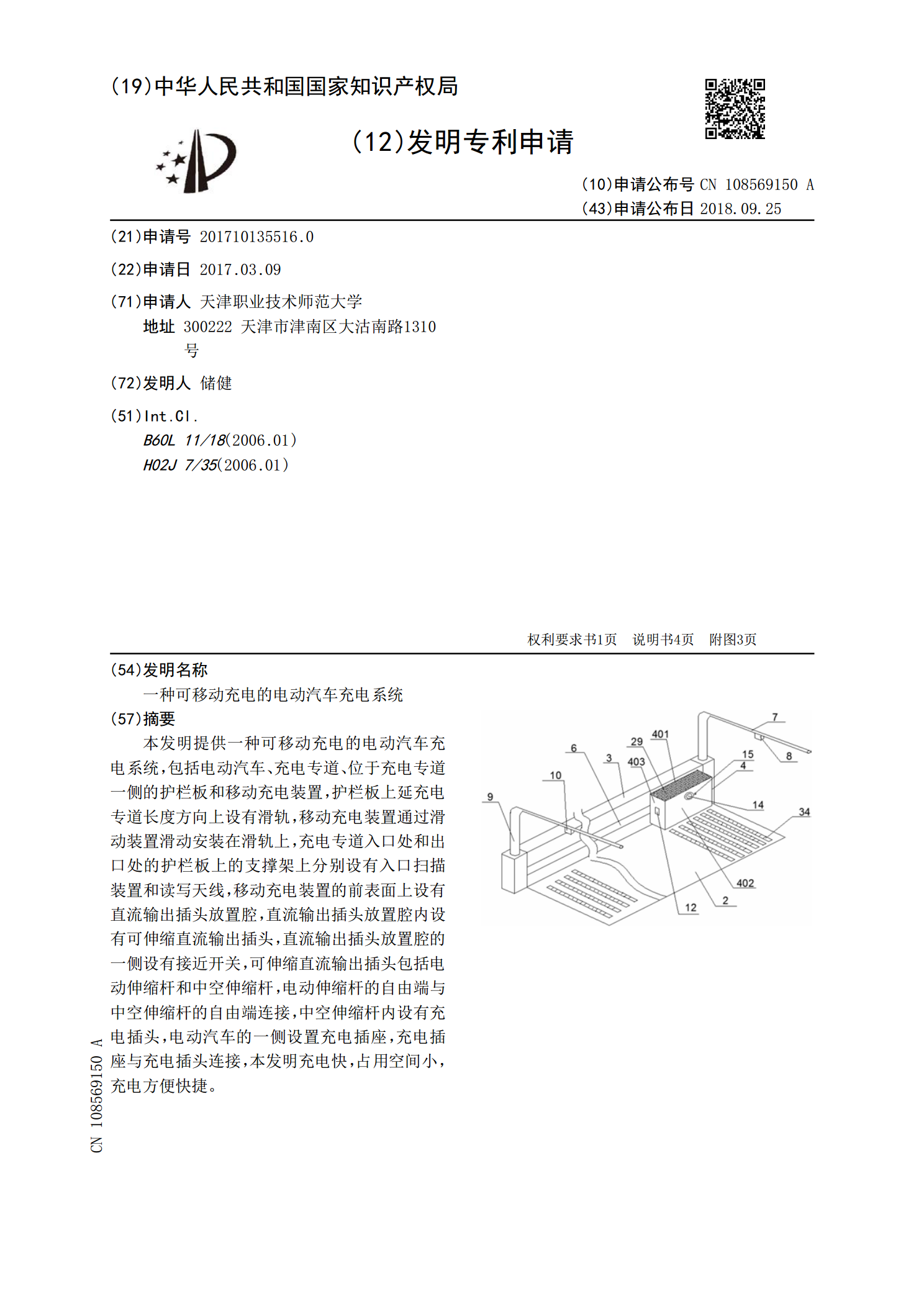
本发明提供一种可移动充电的电动汽车充电系统,包括电动汽车、充电专道、位于充电专道一侧的护栏板和移动充电装置,护栏板上延充电专道长度方向上设有滑轨,移动充电装置通过滑动装置滑动安装在滑轨上,充电专道入口处和出口处的护栏板上的支撑架上分别设有入口扫描装置和读写天线,移动充电装置的前表面上设有直流输出插头放置腔,直流输出插头放置腔内设有可伸缩直流输出插头,直流输出插头放置腔的一侧设有接近开关,可伸缩直流输出插头包括电动伸缩杆和中空伸缩杆,电动伸缩杆的自由端与中空伸缩杆的自由端连接,中空伸缩杆内设有充电插头,电动

一种机器人搜索充电基座位置的方法及机器人.pdf
本发明适用于机器人技术领域,提供了一种机器人搜索充电基座位置的方法及机器人,其中,该机器人搜索充电基座的方法包括获取待搜索区域的电子地图,所述电子地图包含障碍物的信息,根据所述电子地图中任意两个障碍物间的距离,确定搜索充电基座位置的路径,所述任意两个障碍物处于平行位置关系,根据确定的搜索路径搜索所述充电基座的位置。本发明通过根据电子地图中障碍物间的距离,可以在充电基座的位置发生改变时,仍能快速且高效地搜索到充电基座。