
伸缩臂架和工程机械.pdf

猫巷****提格


1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
伸缩臂架和工程机械.pdf
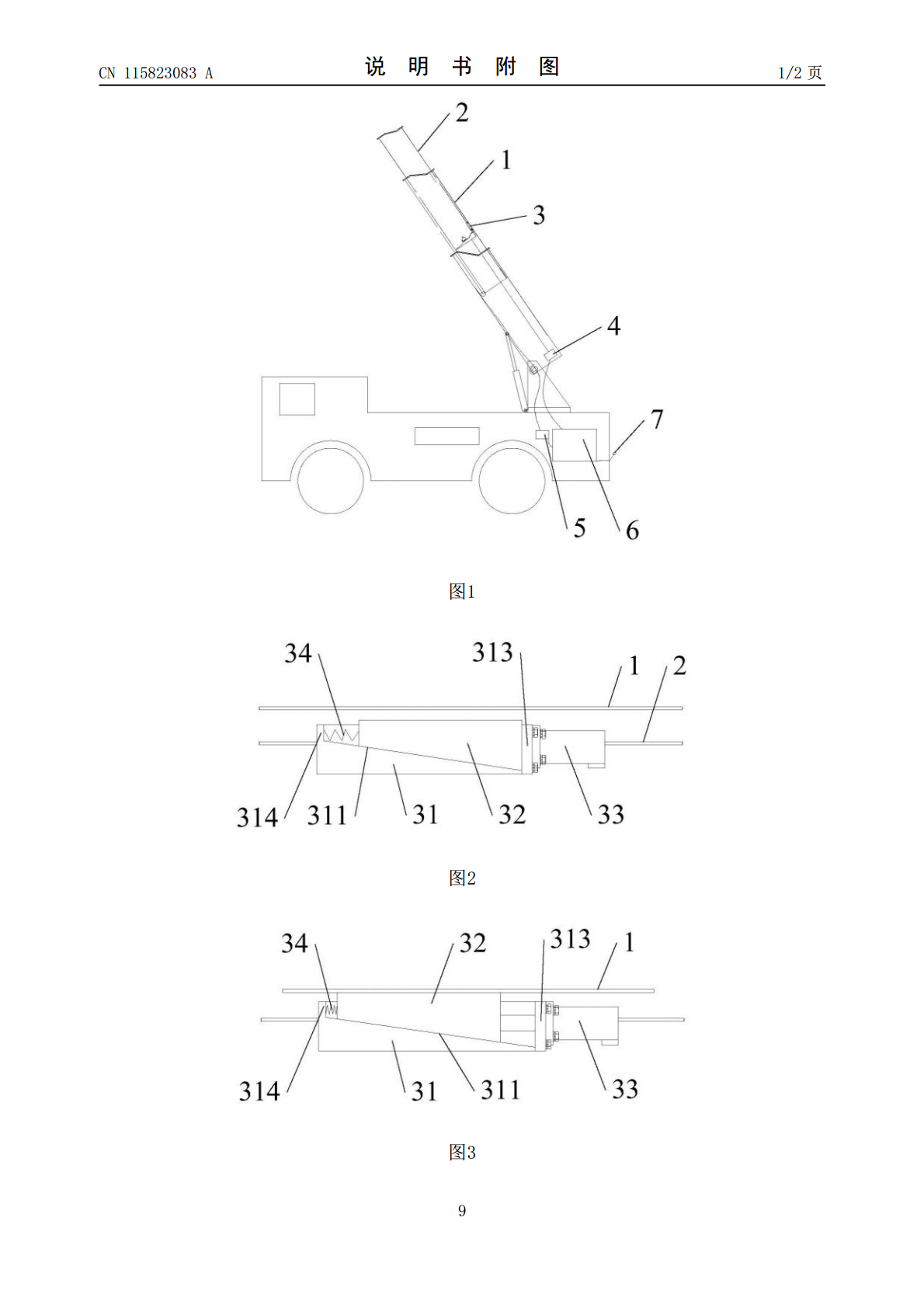
本发明涉及工程机械领域,公开了一种伸缩臂架和工程机械,伸缩臂架包括外臂节、内臂节以及锁止组件,锁止组件包括楔形座、锁止块、驱动机构以及弹性件,楔形座固定设置于内臂节的外壁并具有面向外臂节的内壁的引导斜面,引导斜面相对于内臂节的轴线倾斜设置,锁止块设置于引导斜面上并能够在锁止位置和解锁位置之间滑动,处于锁止位置,锁止块抵顶于外臂节的内壁,处于解锁位置,锁止块与外臂节的内壁之间形成有间隙,弹性件用于提供使锁止件趋向于往解锁位置滑动的弹性力,驱动机构用于驱动锁止块克服弹性件的弹性力滑动至锁止位置。本发明通过设置

臂架的伸缩装置、臂架以及工程机械.pdf
本发明公开了一种臂架的伸缩装置,所述臂架包括第一节臂(1)、第二节臂(2)和第三节臂(3),其中,所述臂架的伸缩装置包括:用于伸缩所述臂架的各节臂的多级伸缩液压缸;第一导向轮(10)和绕在所述第一导向轮(10)上的第一导向件(11);以及第二导向轮(18)和绕在所述第二导向轮(18)上的第二导向件(17)。此外,本发明还公开了一种臂架以及工程机械。由于采用多级液压伸缩缸来同时驱动多个节臂,并且在多个节臂上加装了使多个节臂的伸缩速度一致的导向轮与导向件,从而实现了臂架的多个节臂的同步伸缩。

伸缩式桁架臂和工程机械.pdf
本申请公开了一种伸缩式桁架臂和工程机械。伸缩式桁架臂包括依次套设的至少三层臂节。臂节包括多个臂节面和滑块组件。每个臂节面包括两个主弦杆、多个腹杆和多个连接板。两个主弦杆平行间隔设置。主弦杆的至少一端设有滑块组件。多个腹杆设置在两个主弦杆间。连接板连接腹杆和主弦杆。连接板的厚度小于腹杆的厚度。由于连接板的板状的特点,在相邻层臂节之间保留了较大的空间,通过该空间安装滑块组件,使内层臂节滑动顺畅,且实现更多层的臂节套设。在增大伸缩式桁架臂的伸缩幅度的同时,保障各臂节的滑动平顺性和承载能力,提升工程机械的作业适用
伸缩臂架滑块固定和调节机构.pdf
本发明公布一种伸缩臂架滑块固定和调节机构,属于工程机械伸缩臂技术领域。包括中空的外臂架、内臂架;内臂架上端开有凹槽,外臂架下端开有通孔,在凹槽和通孔内分别安装有滑块;内臂架上的滑块的导向面嵌入在内臂架凹槽内,外臂架上的滑块的导向面嵌入在外臂架通孔内,滑块的支撑面位于外臂架内壁与内臂架外壁之间;在外臂架通孔外密封固定有封板,在至少两个封板中安装有紧固装置。本发明改善了滑块的安装和调节间隙的结构,大大提高了用户维护支撑架间隙的效率,降低了劳动强度,节约了成本;整体操作简单、安全可靠、易于实现;适用于大多数安装
伸缩式支腿装置及臂架类工程机械设备.pdf
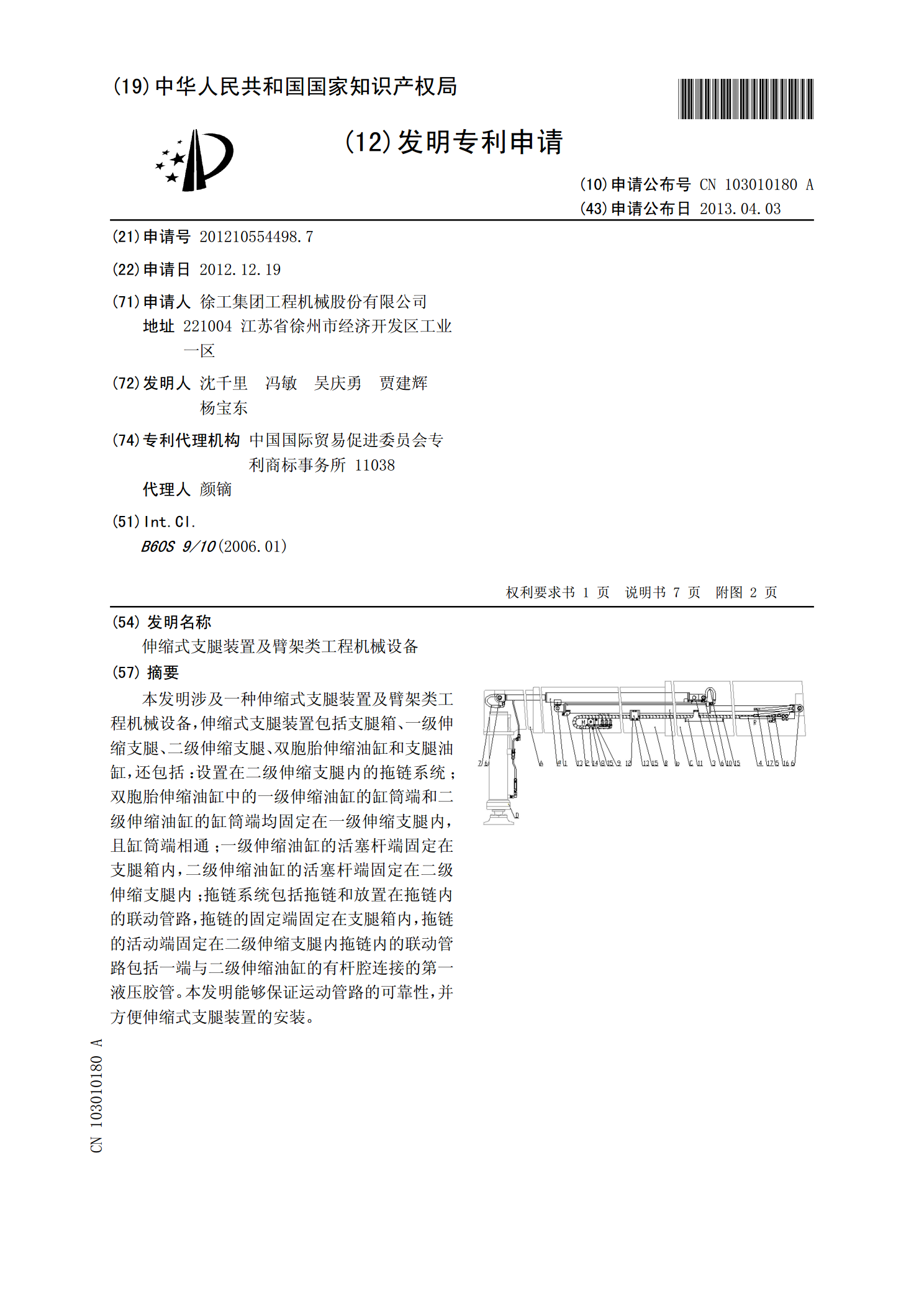
本发明涉及一种伸缩式支腿装置及臂架类工程机械设备,伸缩式支腿装置包括支腿箱、一级伸缩支腿、二级伸缩支腿、双胞胎伸缩油缸和支腿油缸,还包括:设置在二级伸缩支腿内的拖链系统;双胞胎伸缩油缸中的一级伸缩油缸的缸筒端和二级伸缩油缸的缸筒端均固定在一级伸缩支腿内,且缸筒端相通;一级伸缩油缸的活塞杆端固定在支腿箱内,二级伸缩油缸的活塞杆端固定在二级伸缩支腿内;拖链系统包括拖链和放置在拖链内的联动管路,拖链的固定端固定在支腿箱内,拖链的活动端固定在二级伸缩支腿内拖链内的联动管路包括一端与二级伸缩油缸的有杆腔连接的第一液