
一种火电机组灵活变负荷分布式智能预测控制方法.pdf

Ro****44

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种火电机组灵活变负荷分布式智能预测控制方法.pdf
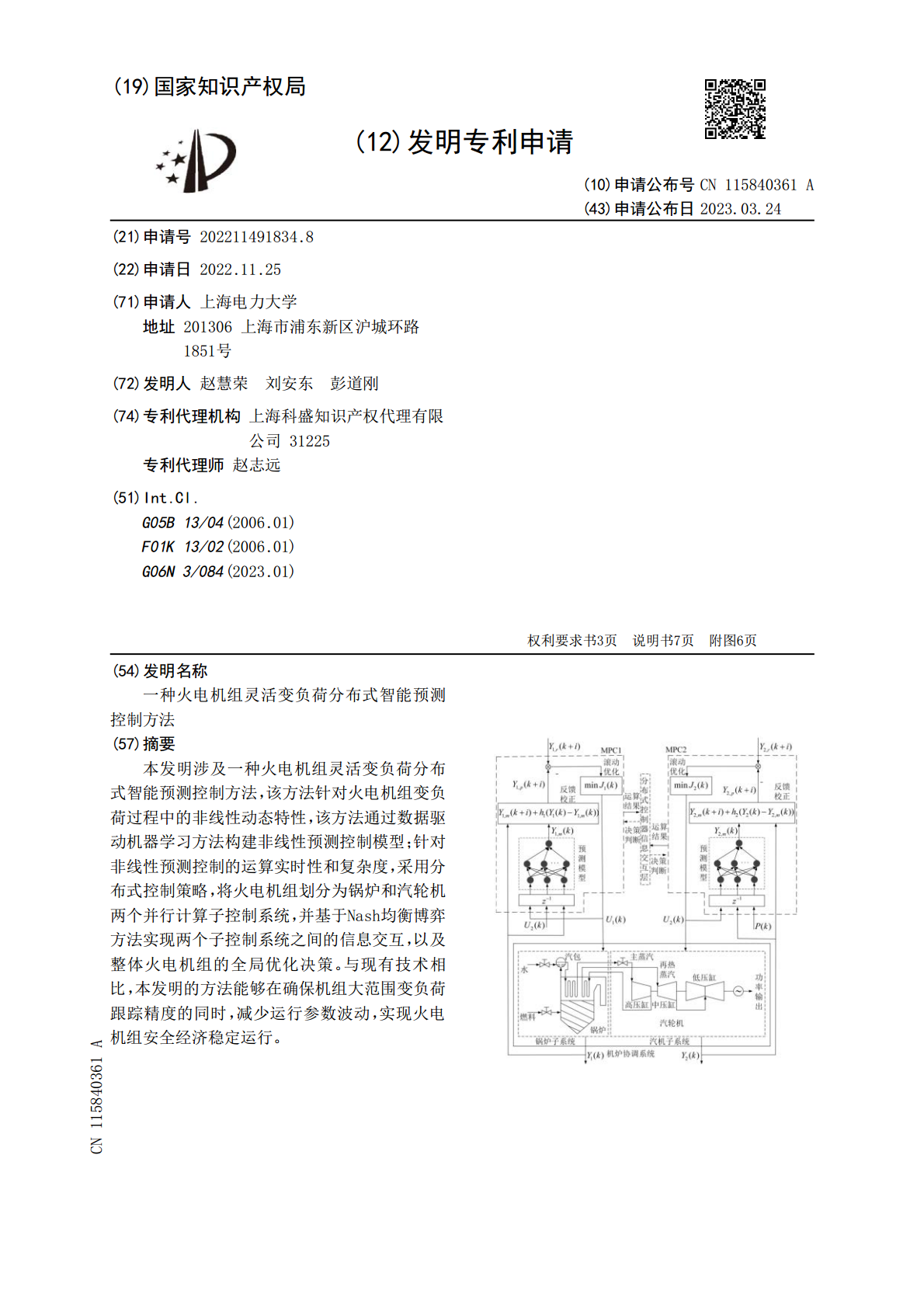
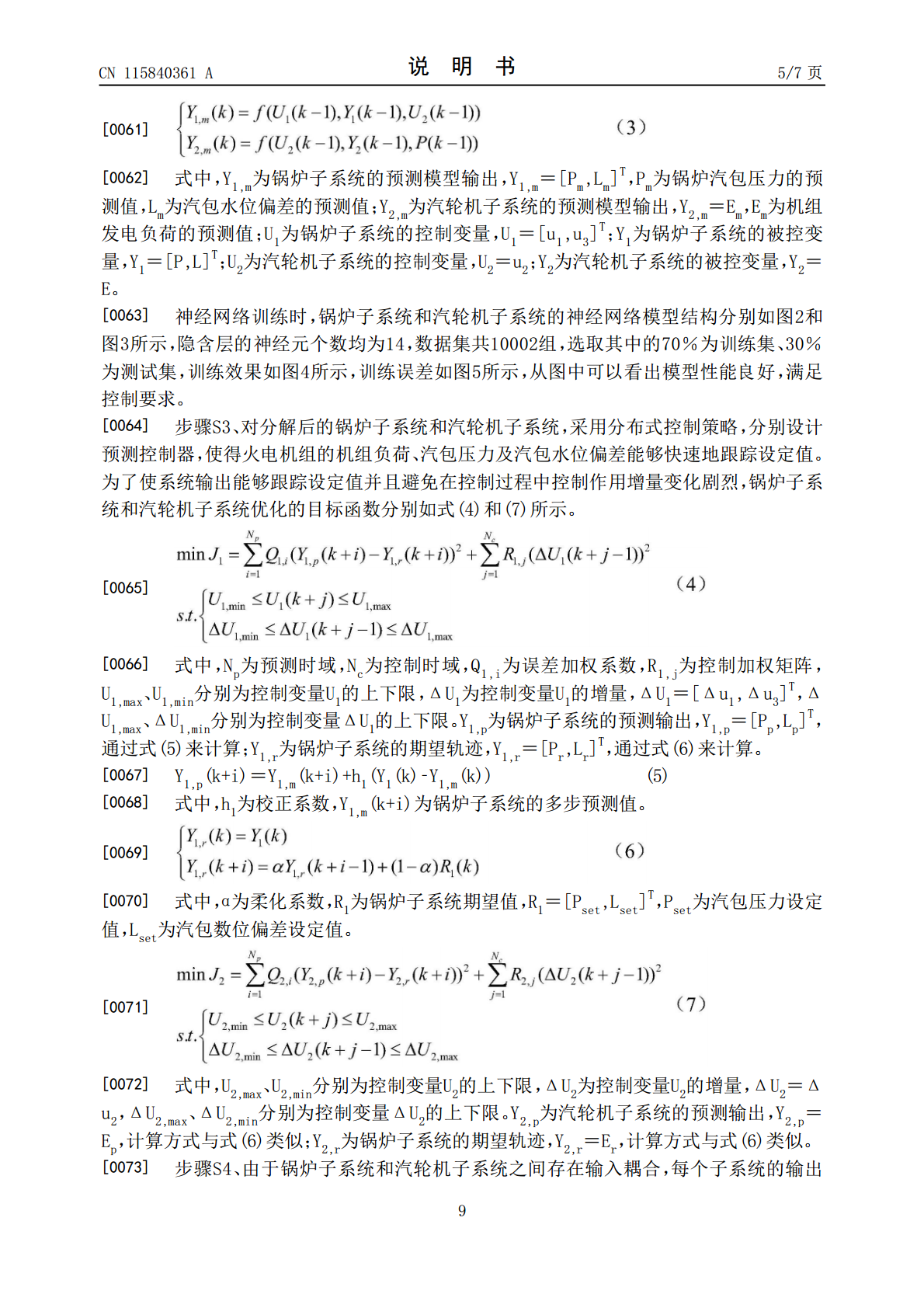
本发明涉及一种火电机组灵活变负荷分布式智能预测控制方法,该方法针对火电机组变负荷过程中的非线性动态特性,该方法通过数据驱动机器学习方法构建非线性预测控制模型;针对非线性预测控制的运算实时性和复杂度,采用分布式控制策略,将火电机组划分为锅炉和汽轮机两个并行计算子控制系统,并基于Nash均衡博弈方法实现两个子控制系统之间的信息交互,以及整体火电机组的全局优化决策。与现有技术相比,本发明的方法能够在确保机组大范围变负荷跟踪精度的同时,减少运行参数波动,实现火电机组安全经济稳定运行。

一种火电机组变参数负荷优化控制方法.pdf
本发明公开了一种火电机组变参数负荷优化控制方法,具体步骤为:步骤一:根据负荷指令值的变化大小经微分环节产生判断数值;步骤二:根据微分环节产生的判断数值通过高低幅值判断模块生成变参数切换逻辑的判断条件;步骤三:根据高低幅值判断模块的输出指令,汽机主控器对切换器切换。本发明通过对汽机主控制器的逻辑结构进行优化,针对负荷的变化情况采用变参数控制措施,有效消除了汽轮机调门执行机构的死区和惯性,提高了系统的控制精度和动态品质,确保了火电机组负荷的调节速率、调节精度、响应时间,提高了火电机组AGC的控制品质和考核指标

一种机组负荷双重智能优化控制方法.pdf
一种机组负荷双重智能优化控制方法,首先建立计及凝结水节流的超临界机组负荷特性神经网络预测模型,并利用机组历史运行数据对预测模型进行训练和验证,然后利用该预测模型在机组的动态变负荷阶段和负荷趋稳阶段分别对除氧器水位调节阀开度和汽轮机调门开度进行预测和优化,再将各优化结果与原控制指令的偏差作为补偿信号叠加至相应的控制信号上对机组实施优化控制。本发明不仅可提高汽轮机在动态变负荷过程中的负荷响应速率,确保除氧器水位处于机组安全运行范围,还可保证负荷趋稳阶段凝结水流量恢复过程中机组负荷的调节精度,可大大提高机组的深
一种火电机组负荷控制方法、装置和系统.pdf
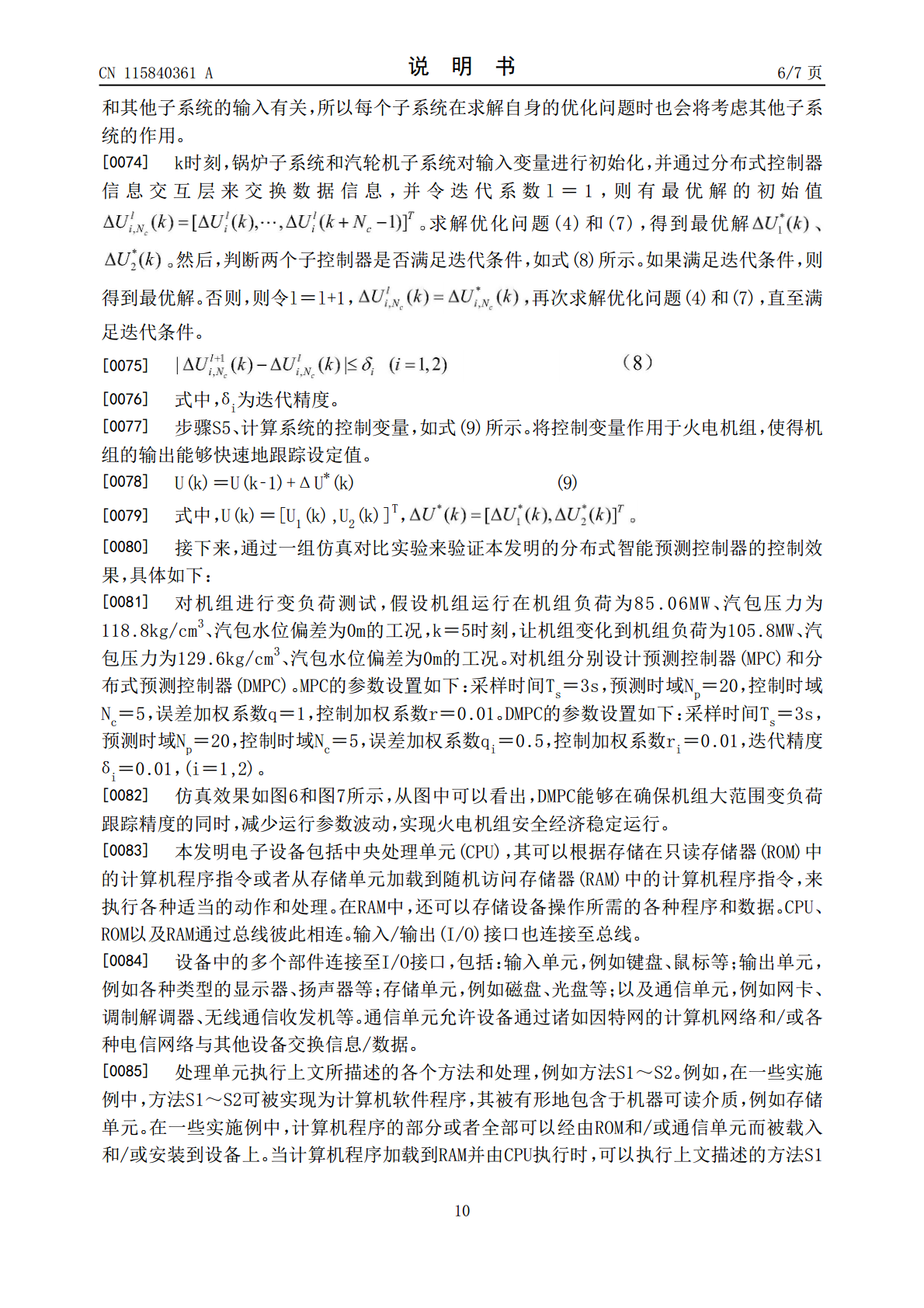
本发明公开了一种火电机组负荷控制方法、装置和系统,用以解决由于火电机组的锅炉延迟滞后性导致的调节火电机组供电负荷效率低的问题。本方案包括:获取火电机组的目标负荷功率值和火电机组的负荷参数;根据目标负荷功率值和负荷参数表征的实际供电功率值的差值确定目标调节功率值;根据功率值火电机组的凝结水节流负荷参数和抽汽节流负荷参数生成第一调节指令和第二调节指令;根据功率值第一调节指令和功率值第二调节指令分别控制功率值火电机组的凝结水节流负荷和功率值抽汽节流负荷。本方案通过指令分别对火电机组的凝结水节流负荷和抽汽节流负荷
一种二次再热火电机组变负荷过程蒸汽温度控制方法.pdf
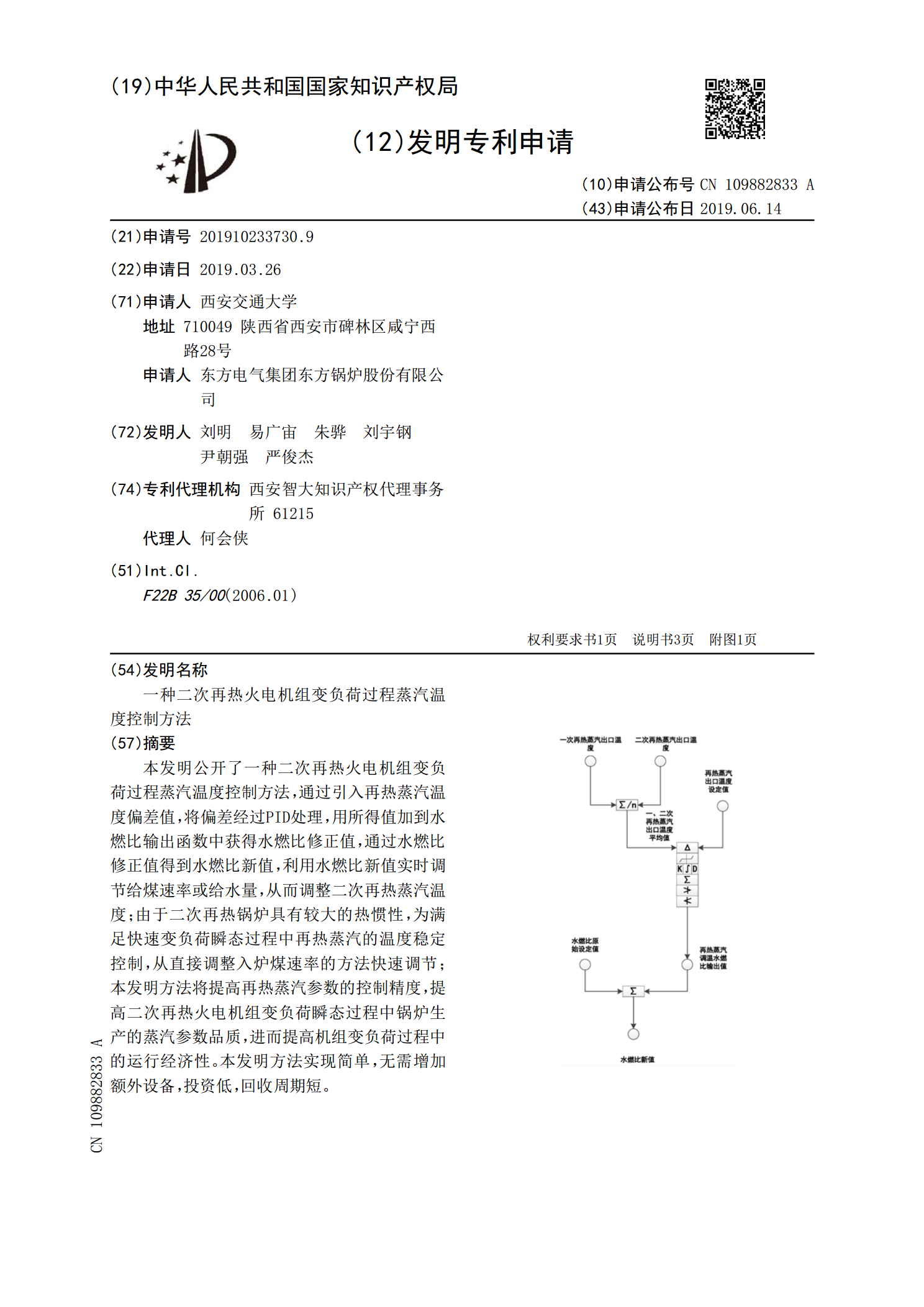
本发明公开了一种二次再热火电机组变负荷过程蒸汽温度控制方法,通过引入再热蒸汽温度偏差值,将偏差经过PID处理,用所得值加到水燃比输出函数中获得水燃比修正值,通过水燃比修正值得到水燃比新值,利用水燃比新值实时调节给煤速率或给水量,从而调整二次再热蒸汽温度;由于二次再热锅炉具有较大的热惯性,为满足快速变负荷瞬态过程中再热蒸汽的温度稳定控制,从直接调整入炉煤速率的方法快速调节;本发明方法将提高再热蒸汽参数的控制精度,提高二次再热火电机组变负荷瞬态过程中锅炉生产的蒸汽参数品质,进而提高机组变负荷过程中的运行经济性