
一种棒料自动定位夹紧装置.pdf

书錦****by

1/8

2/8
3/8

4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种棒料自动定位夹紧装置.pdf
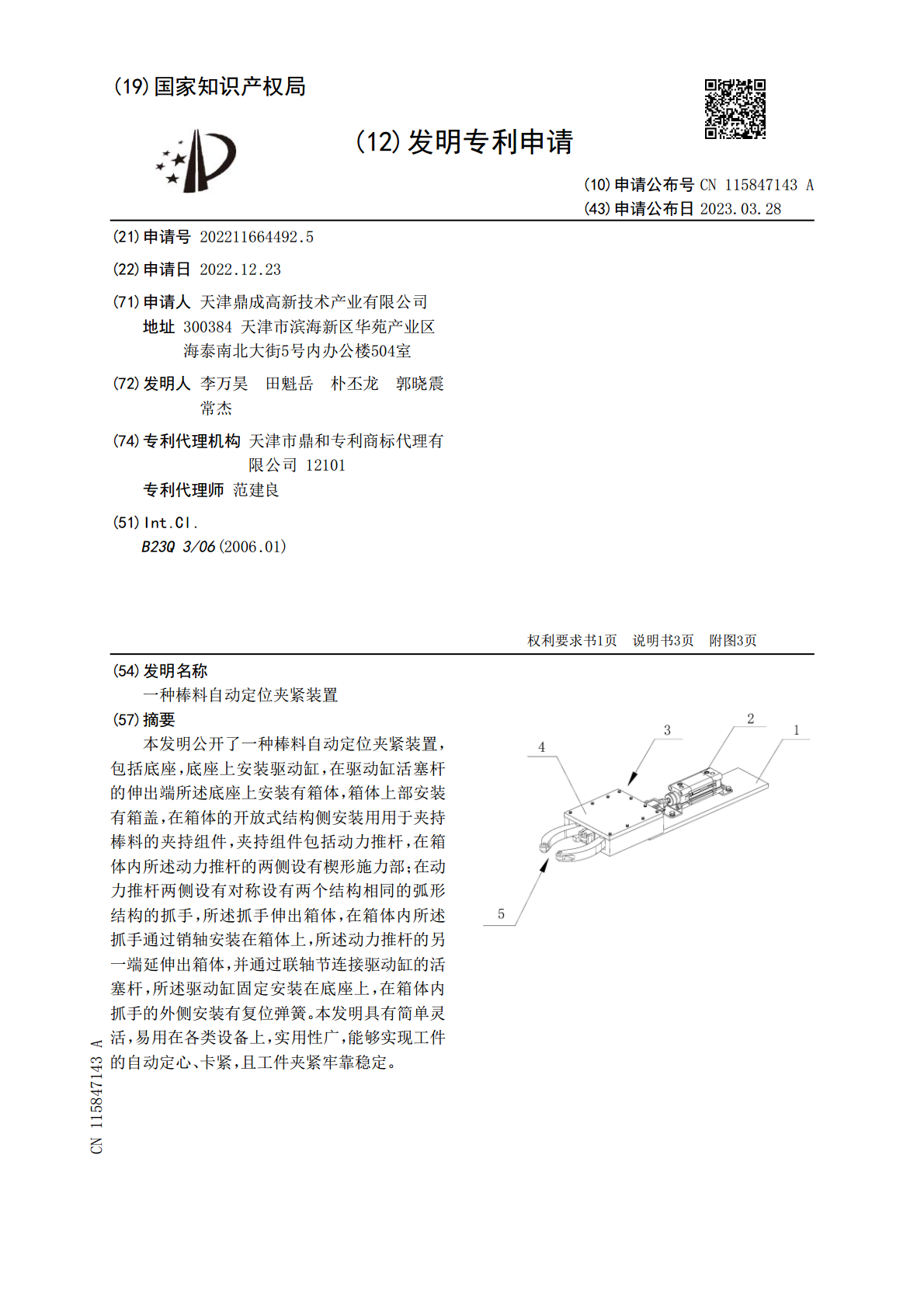
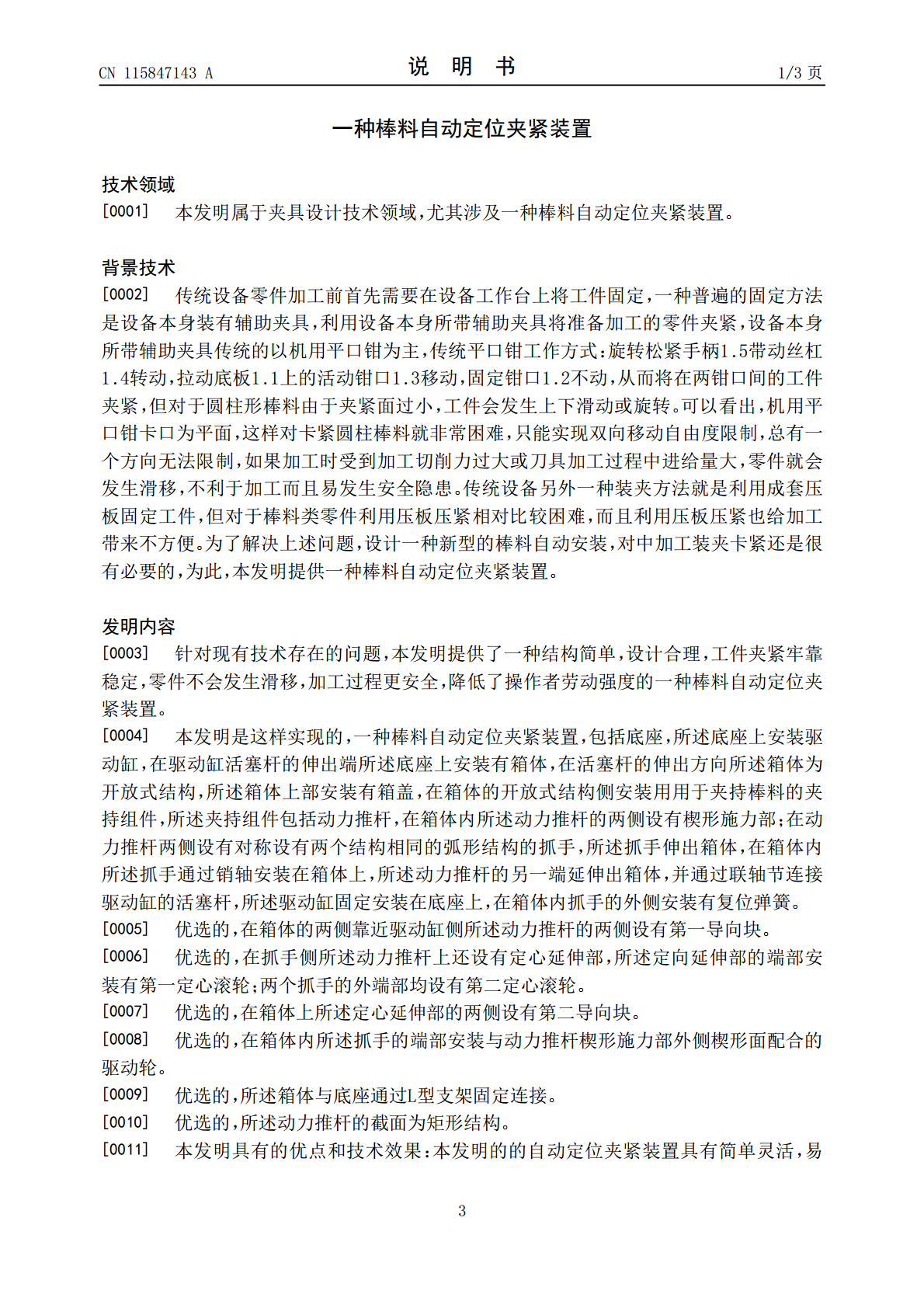
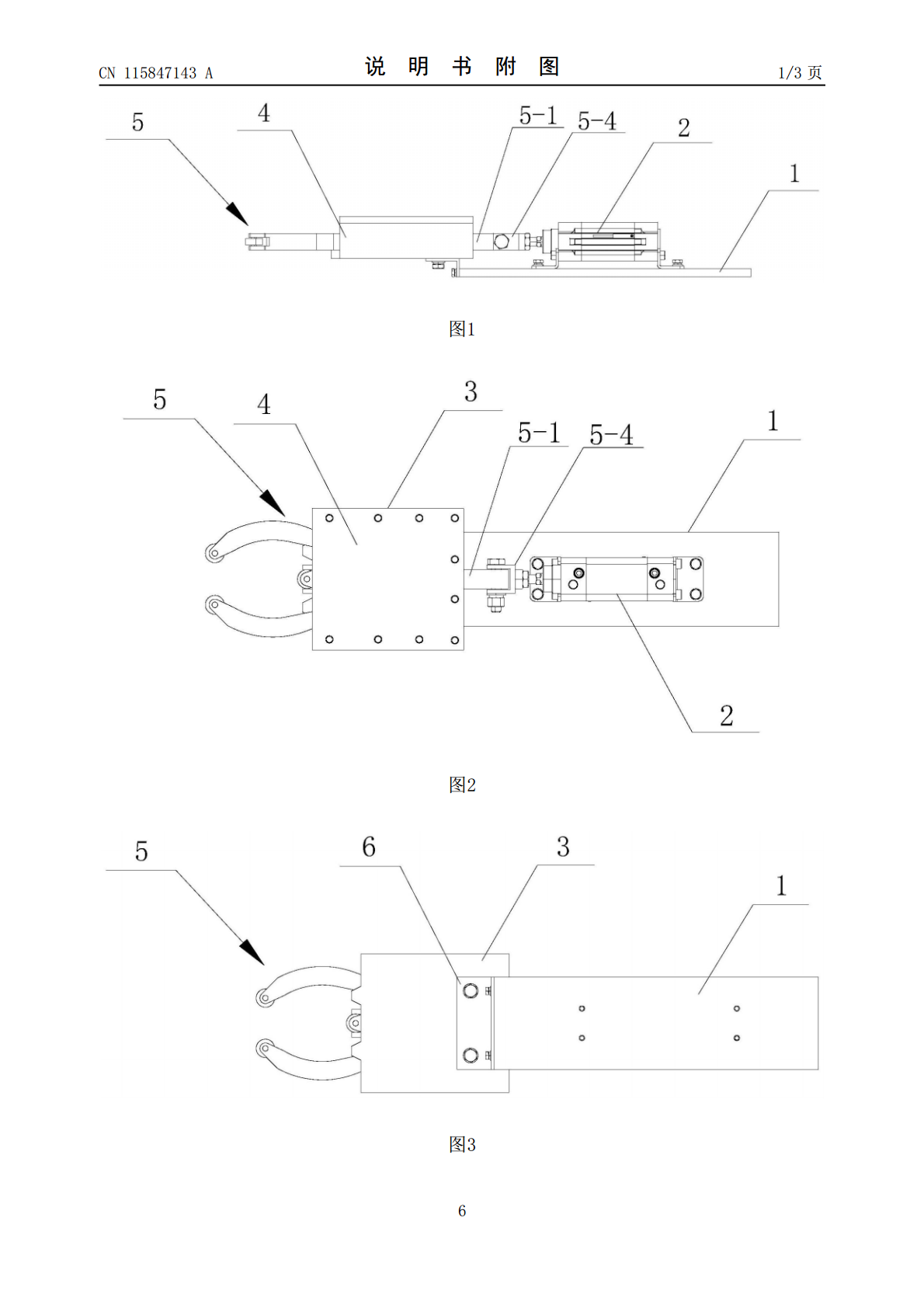
本发明公开了一种棒料自动定位夹紧装置,包括底座,底座上安装驱动缸,在驱动缸活塞杆的伸出端所述底座上安装有箱体,箱体上部安装有箱盖,在箱体的开放式结构侧安装用用于夹持棒料的夹持组件,夹持组件包括动力推杆,在箱体内所述动力推杆的两侧设有楔形施力部;在动力推杆两侧设有对称设有两个结构相同的弧形结构的抓手,所述抓手伸出箱体,在箱体内所述抓手通过销轴安装在箱体上,所述动力推杆的另一端延伸出箱体,并通过联轴节连接驱动缸的活塞杆,所述驱动缸固定安装在底座上,在箱体内抓手的外侧安装有复位弹簧。本发明具有简单灵活,易用在各
一种棒料自动加载装置的加载方法及棒料自动加载装置.pdf
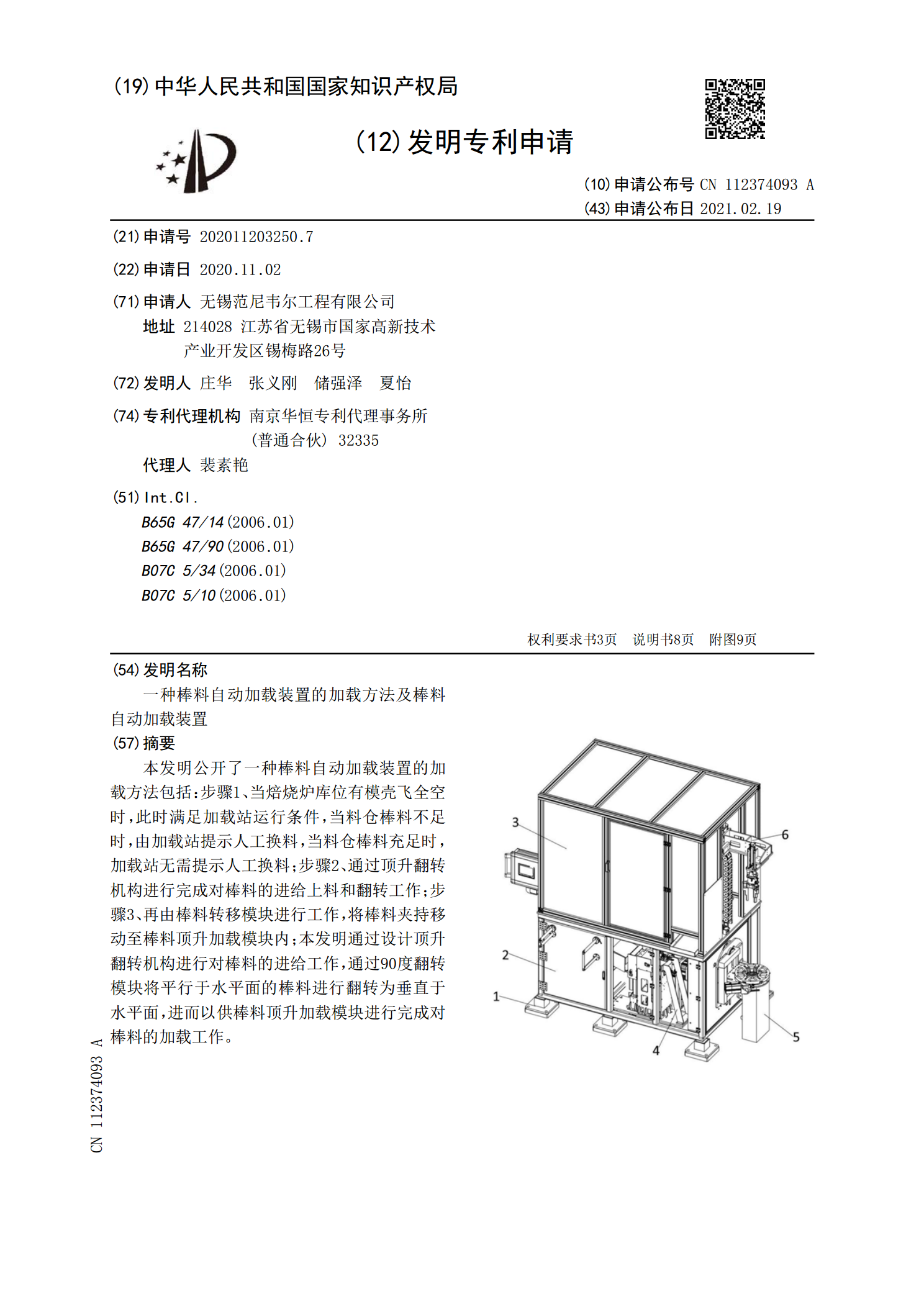
本发明公开了一种棒料自动加载装置的加载方法包括:步骤1、当焙烧炉库位有模壳飞全空时,此时满足加载站运行条件,当料仓棒料不足时,由加载站提示人工换料,当料仓棒料充足时,加载站无需提示人工换料;步骤2、通过顶升翻转机构进行完成对棒料的进给上料和翻转工作;步骤3、再由棒料转移模块进行工作,将棒料夹持移动至棒料顶升加载模块内;本发明通过设计顶升翻转机构进行对棒料的进给工作,通过90度翻转模块将平行于水平面的棒料进行翻转为垂直于水平面,进而以供棒料顶升加载模块进行完成对棒料的加载工作。
筒灯自动传送及定位夹紧装置.pdf
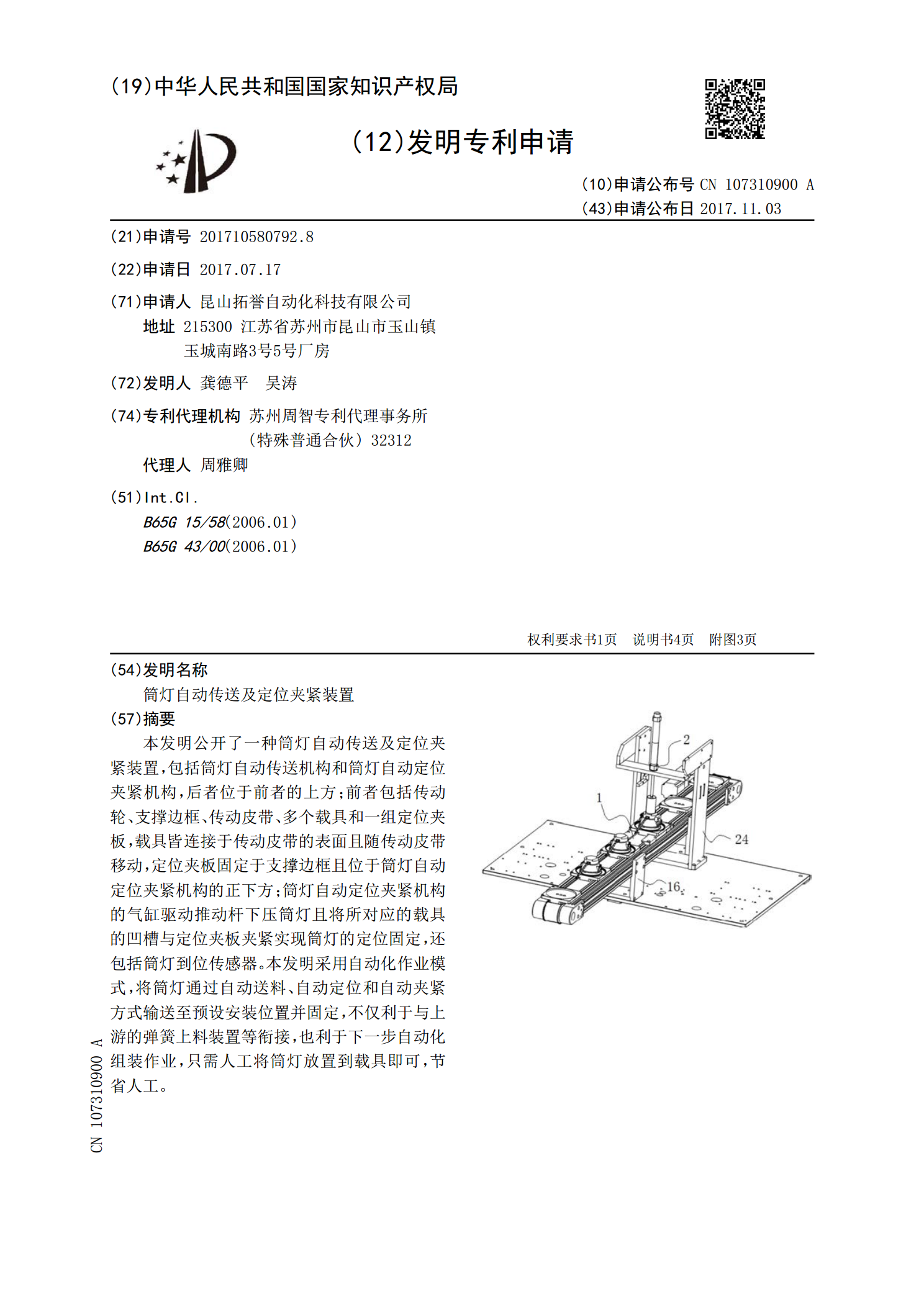
本发明公开了一种筒灯自动传送及定位夹紧装置,包括筒灯自动传送机构和筒灯自动定位夹紧机构,后者位于前者的上方;前者包括传动轮、支撑边框、传动皮带、多个载具和一组定位夹板,载具皆连接于传动皮带的表面且随传动皮带移动,定位夹板固定于支撑边框且位于筒灯自动定位夹紧机构的正下方;筒灯自动定位夹紧机构的气缸驱动推动杆下压筒灯且将所对应的载具的凹槽与定位夹板夹紧实现筒灯的定位固定,还包括筒灯到位传感器。本发明采用自动化作业模式,将筒灯通过自动送料、自动定位和自动夹紧方式输送至预设安装位置并固定,不仅利于与上游的弹簧上料

一种棒料快速夹紧抓取装置.pdf
本发明涉及一种棒料快速夹紧抓取装置,主要包括圆环形的总座体,总座体内部沿环形方向均匀安装有六个传递齿轮;六个传递齿轮中的每两个相邻传递齿轮之间均设有与二者相互啮合的惰轮,六个传递齿轮中的任意一个传递齿轮连接有电机;传递齿轮下端均连接有传动齿轮,传动齿轮均啮合有齿条,总座体上分布有六个分别一一对应将所述齿条进行滑动安装的滑动槽,齿条下端均连接有扇形的夹块。本发明自动化程度高,能够利用轮齿传动方式同步驱动多个夹块同步向中心方向运动进而能够达到将棒料夹紧固定的效果,进而能够有效辅助机器人手臂进行抓取工作,操作方

一种自动定位、夹紧方法及装置的创新设计.docx
一种自动定位、夹紧方法及装置的创新设计本文主要针对一种自动定位、夹紧方法及装置的创新设计进行探讨。该方法在机器人加工、装配和焊接领域具有广泛的应用前景。一、介绍在工业生产中,许多工作需要自动化机器人完成。在机器人工作的过程中,需要对工件进行定位、夹紧等操作。一般的定位、夹紧方法需要人力干预,操作繁琐,效率低下。因此,研究自动化定位、夹紧方法具有非常重要的实际意义。二、设计原理本文提出了一种新型自动定位、夹紧方法。该方法基于传感器的信号来判断工件位置,并通过气动夹紧装置夹紧工件。具体实施过程如下:1.利用视