
人形体的关节构造.pdf

纪阳****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
人形体的关节构造.pdf
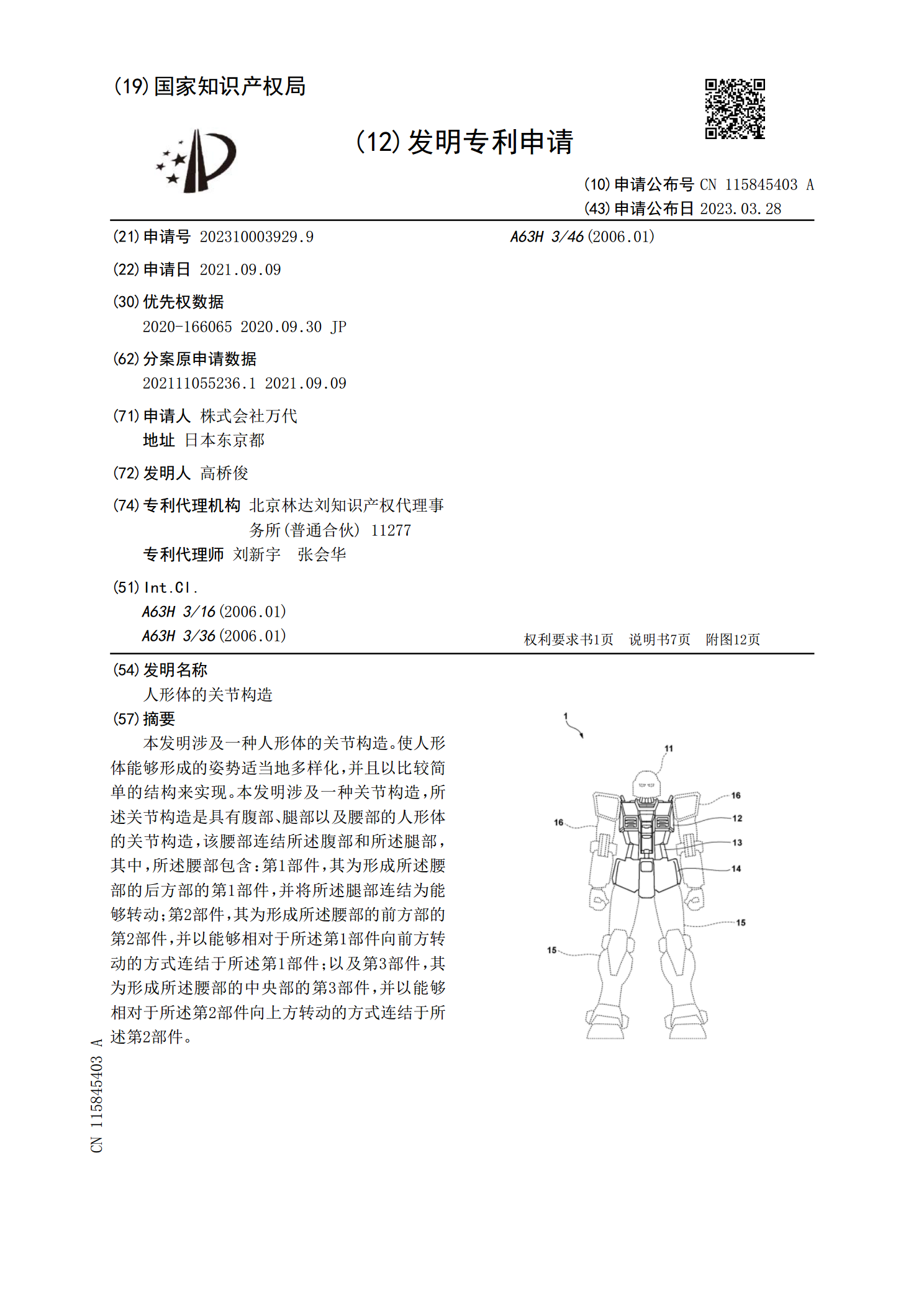
本发明涉及一种人形体的关节构造。使人形体能够形成的姿势适当地多样化,并且以比较简单的结构来实现。本发明涉及一种关节构造,所述关节构造是具有腹部、腿部以及腰部的人形体的关节构造,该腰部连结所述腹部和所述腿部,其中,所述腰部包含:第1部件,其为形成所述腰部的后方部的第1部件,并将所述腿部连结为能够转动;第2部件,其为形成所述腰部的前方部的第2部件,并以能够相对于所述第1部件向前方转动的方式连结于所述第1部件;以及第3部件,其为形成所述腰部的中央部的第3部件,并以能够相对于所述第2部件向上方转动的方式连结于所述

关节构造和人形体.pdf
本发明提供关节构造和人形体。实现能够使人形体的可动部的灵活性提高的关节构造。人形体的关节构造具备:第1摆动连杆,其与腰部基体连结且能够在摆动方向上摆动;以及第2摆动连杆,其一端部与第1摆动连杆连结,另一端部与腿部连结,该第2摆动连杆能够相对于第1摆动连杆在摆动方向上摆动。利用由第1摆动和第2摆动实现的多级摆动,从而能够从腰部阶段性地拉出第2摆动连杆的另一端部(第3摆动轴承)或使该另一端部阶段性地进入该腰部,该第1摆动为第1摆动连杆相对于腰部基体摆动,该第2摆动为第2摆动连杆相对于第1摆动连杆摆动。
关节构造和人形体.pdf
本发明提供关节构造和人形体。实现能够使人形体的可动部的灵活性提高的关节构造。人形体的关节构造具备:第1摆动连杆,其与腰部基体连结且能够在摆动方向上摆动;以及第2摆动连杆,其一端部与第1摆动连杆连结,另一端部与腿部连结,该第2摆动连杆能够相对于第1摆动连杆在摆动方向上摆动。利用由第1摆动和第2摆动实现的多级摆动,从而能够从腰部阶段性地拉出第2摆动连杆的另一端部(第3摆动轴承)或使该另一端部阶段性地进入该腰部,该第1摆动为第1摆动连杆相对于腰部基体摆动,该第2摆动为第2摆动连杆相对于第1摆动连杆摆动。

机器人的关节构造.pdf
本发明公开一种机器人的关节构造,属于机器人技术领域,包括第一关节构件、第二关节构件、驱动装置、进油装置和密封装置,第一关节构件内形成有安装腔;驱动装置包括驱动电机和减速机,驱动电机的电机轴穿设于安装腔并与减速机驱动连接,且减速机的输出轴穿出于安装腔,以驱动第二关节构件相对于第一关节构件运动;密封装置包括两第一密封组件和两第二密封组件,两第一密封组件均安装于减速机,两第一密封组件以分别对减速机与电机轴之间及减速机与输出轴之间进行密封处理;两第二密封组件分别对所述安装腔和所述减速机之间进行密封处理。本发明技术

机器人关节构造.pdf
腕部(4)具有腕部壳体(42),该腕部壳体(42)具有:腕部驱动构造部(422),从腕部驱动用带轮(37)向腕部驱动构造部传递旋转;圆筒部(423),其被第1机械手驱动轴(44)贯穿,该第1机械手驱动轴(44)与腕部驱动构造部(422)的旋转轴同轴地设置,并且从机械手驱动用带轮(35)向第1机械手驱动轴传递旋转;线缆导入部(421),其与圆筒部(423)之间形成环状的间隙;以及机械手驱动轴贯穿部(424),其被第2机械手驱动轴(47)贯穿,该第2机械手驱动轴(47)被传递第1机械手驱动轴(44)的旋转而使