
一种基于卷积神经网络的雷达探测装置以及探测方法.pdf

Ma****57


1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于卷积神经网络的雷达探测装置以及探测方法.pdf
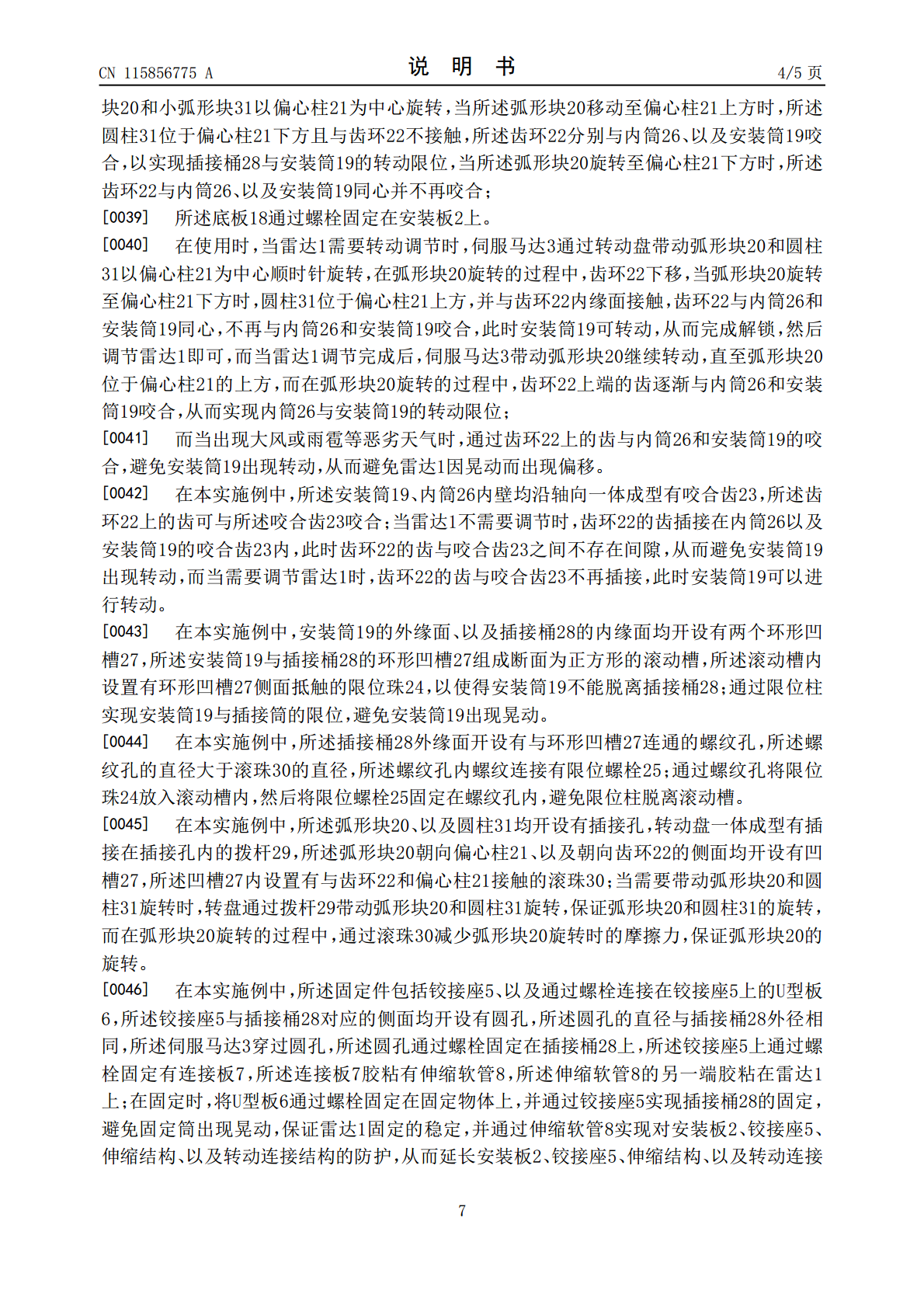
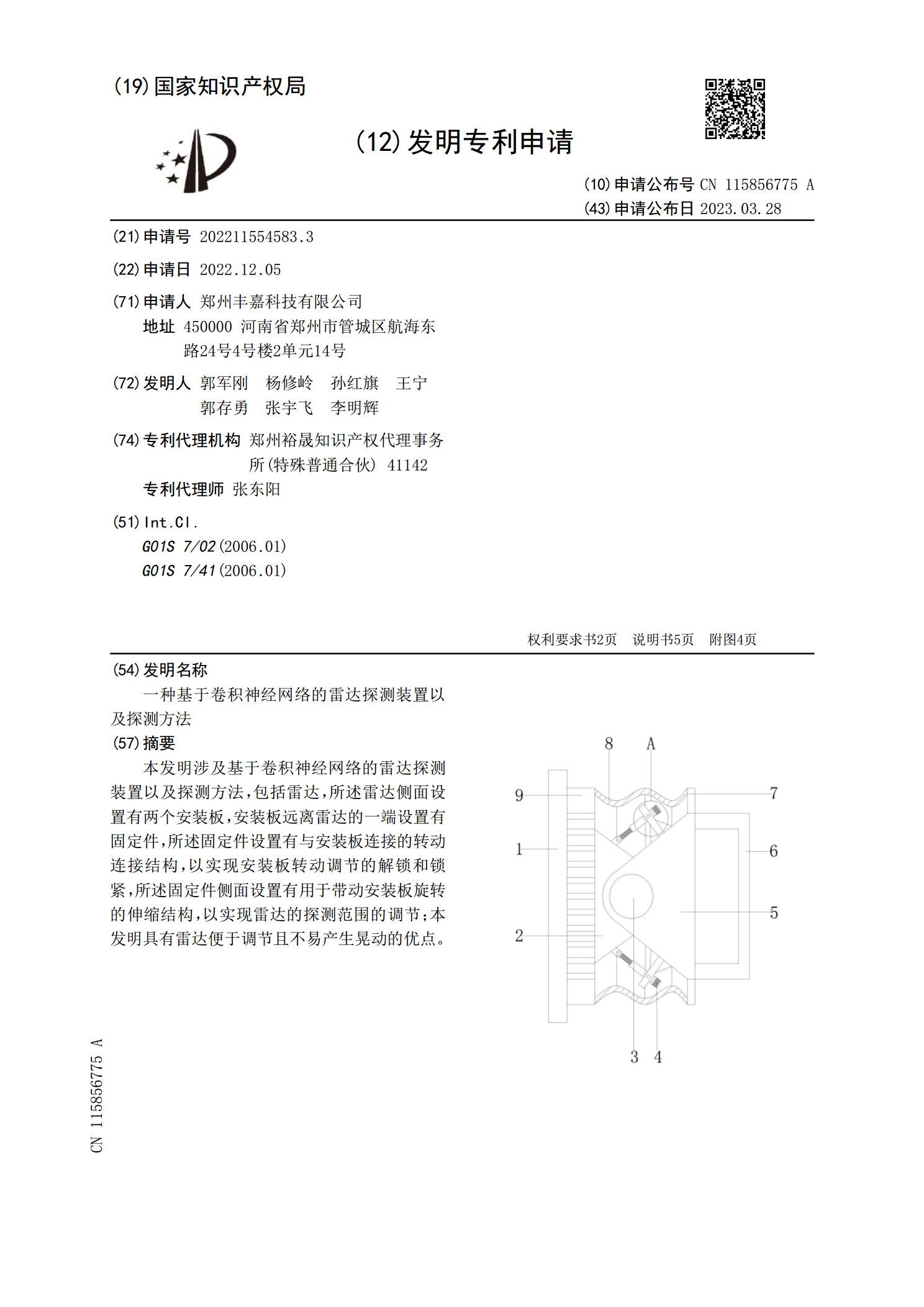
本发明涉及基于卷积神经网络的雷达探测装置以及探测方法,包括雷达,所述雷达侧面设置有两个安装板,安装板远离雷达的一端设置有固定件,所述固定件设置有与安装板连接的转动连接结构,以实现安装板转动调节的解锁和锁紧,所述固定件侧面设置有用于带动安装板旋转的伸缩结构,以实现雷达的探测范围的调节;本发明具有雷达便于调节且不易产生晃动的优点。

卷积神经网络处理装置、高速目标探测方法以及设备.pdf
本发明提出一种卷积神经网络处理装置、高速目标探测方法以及设备。卷积神经网络处理装置包括:处理模块、累加模块、激活模块和存储模块。处理模块,用于根据输入特征值与输入权重值进行融合得到中间特征值,其中,处理模块包括呈阵列结构排布的多个处理单元,阵列结构为具有行、列、通道三个维度的阵列结构;累加模块与处理模块连接,用于根据中间特征值进行累加得到累加结果;激活模块与累加模块连接,用于根据累加结果进行激活处理得到输出特征值;存储模块与激活模块、处理模块分别连接,用于存储输入特征值、输入权重值以及输出特征值。本发明有
探测装置、雷达以及终端.pdf
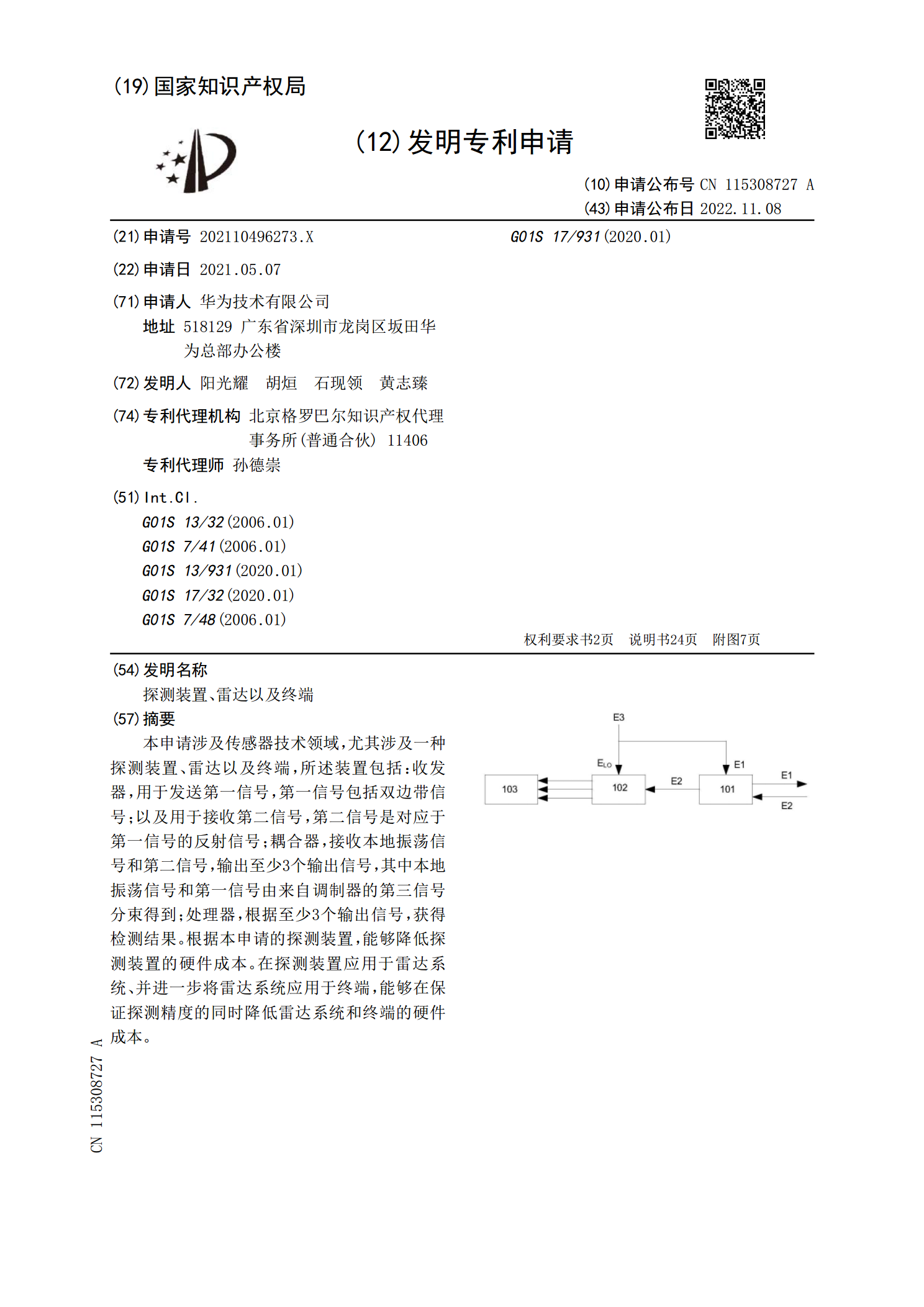
本申请涉及传感器技术领域,尤其涉及一种探测装置、雷达以及终端,所述装置包括:收发器,用于发送第一信号,第一信号包括双边带信号;以及用于接收第二信号,第二信号是对应于第一信号的反射信号;耦合器,接收本地振荡信号和第二信号,输出至少3个输出信号,其中本地振荡信号和第一信号由来自调制器的第三信号分束得到;处理器,根据至少3个输出信号,获得检测结果。根据本申请的探测装置,能够降低探测装置的硬件成本。在探测装置应用于雷达系统、并进一步将雷达系统应用于终端,能够在保证探测精度的同时降低雷达系统和终端的硬件成本。
基于压缩光的量子雷达以及雷达探测方法.pdf
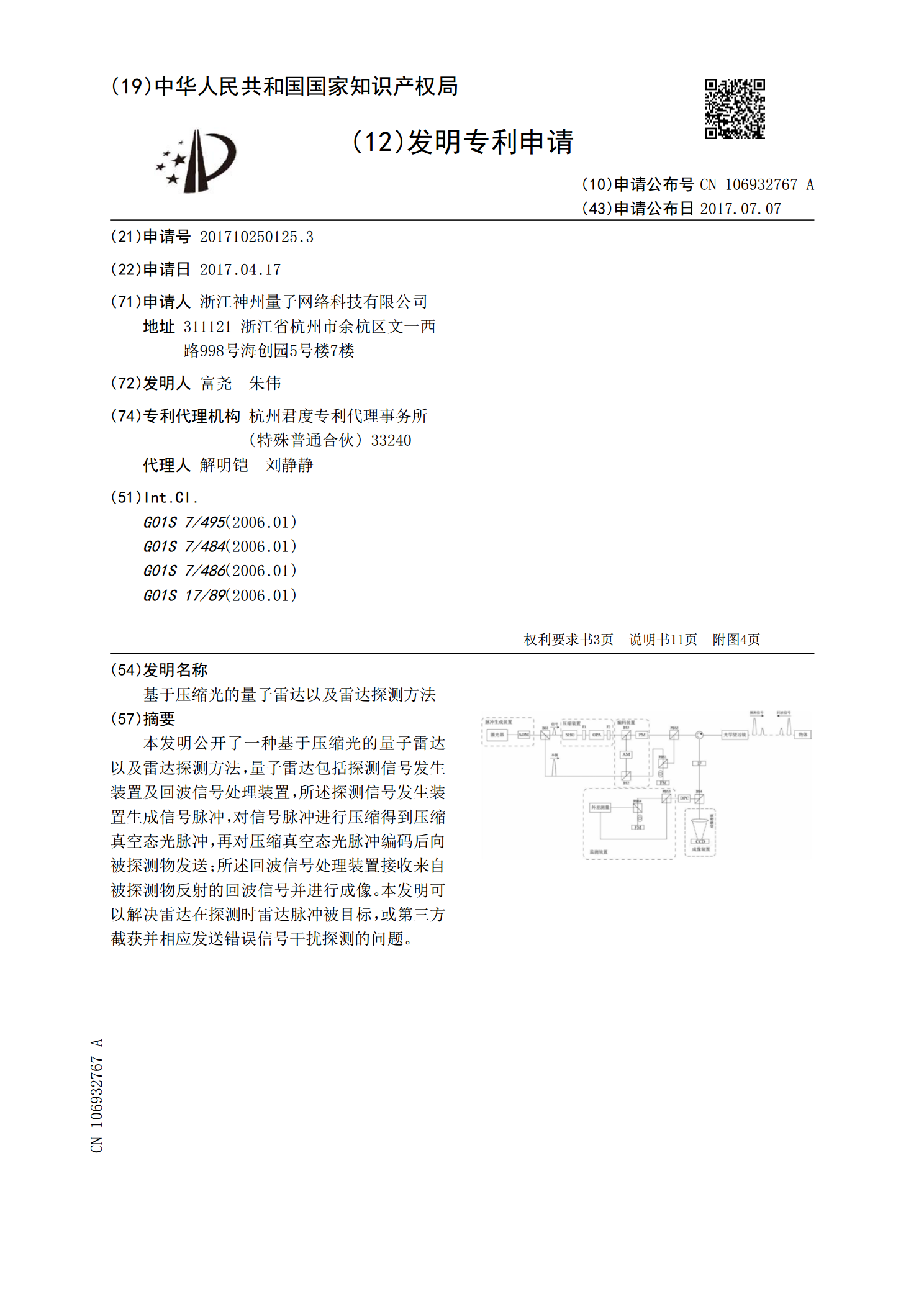
本发明公开了一种基于压缩光的量子雷达以及雷达探测方法,量子雷达包括探测信号发生装置及回波信号处理装置,所述探测信号发生装置生成信号脉冲,对信号脉冲进行压缩得到压缩真空态光脉冲,再对压缩真空态光脉冲编码后向被探测物发送;所述回波信号处理装置接收来自被探测物反射的回波信号并进行成像。本发明可以解决雷达在探测时雷达脉冲被目标,或第三方截获并相应发送错误信号干扰探测的问题。
无线探测雷达装置及其探测方法.pdf
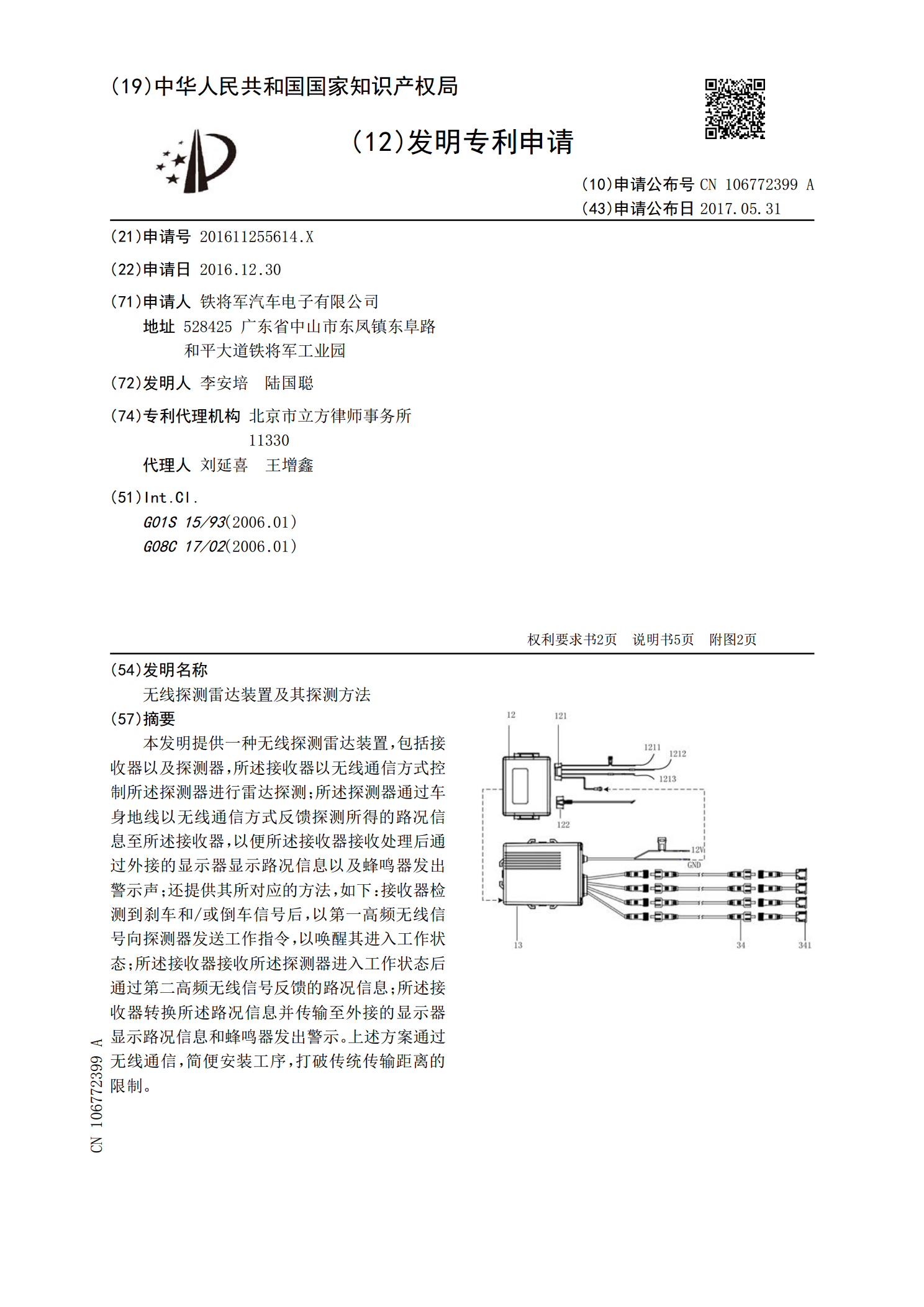
本发明提供一种无线探测雷达装置,包括接收器以及探测器,所述接收器以无线通信方式控制所述探测器进行雷达探测;所述探测器通过车身地线以无线通信方式反馈探测所得的路况信息至所述接收器,以便所述接收器接收处理后通过外接的显示器显示路况信息以及蜂鸣器发出警示声;还提供其所对应的方法,如下:接收器检测到刹车和/或倒车信号后,以第一高频无线信号向探测器发送工作指令,以唤醒其进入工作状态;所述接收器接收所述探测器进入工作状态后通过第二高频无线信号反馈的路况信息;所述接收器转换所述路况信息并传输至外接的显示器显示路况信息和