
一种无人集群多域探测数据航迹关联与预测方法.pdf

一吃****春晓

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人集群多域探测数据航迹关联与预测方法.pdf
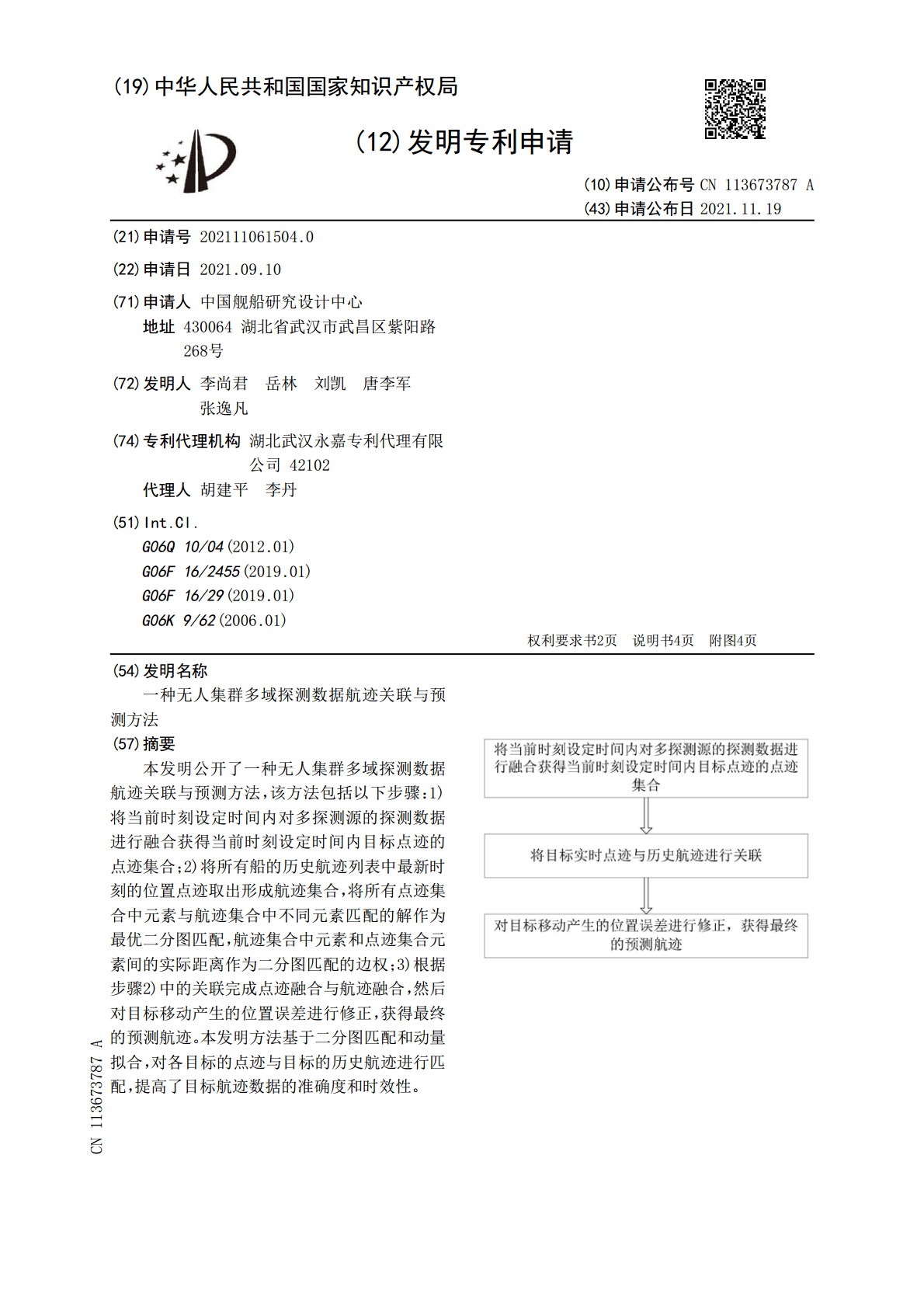
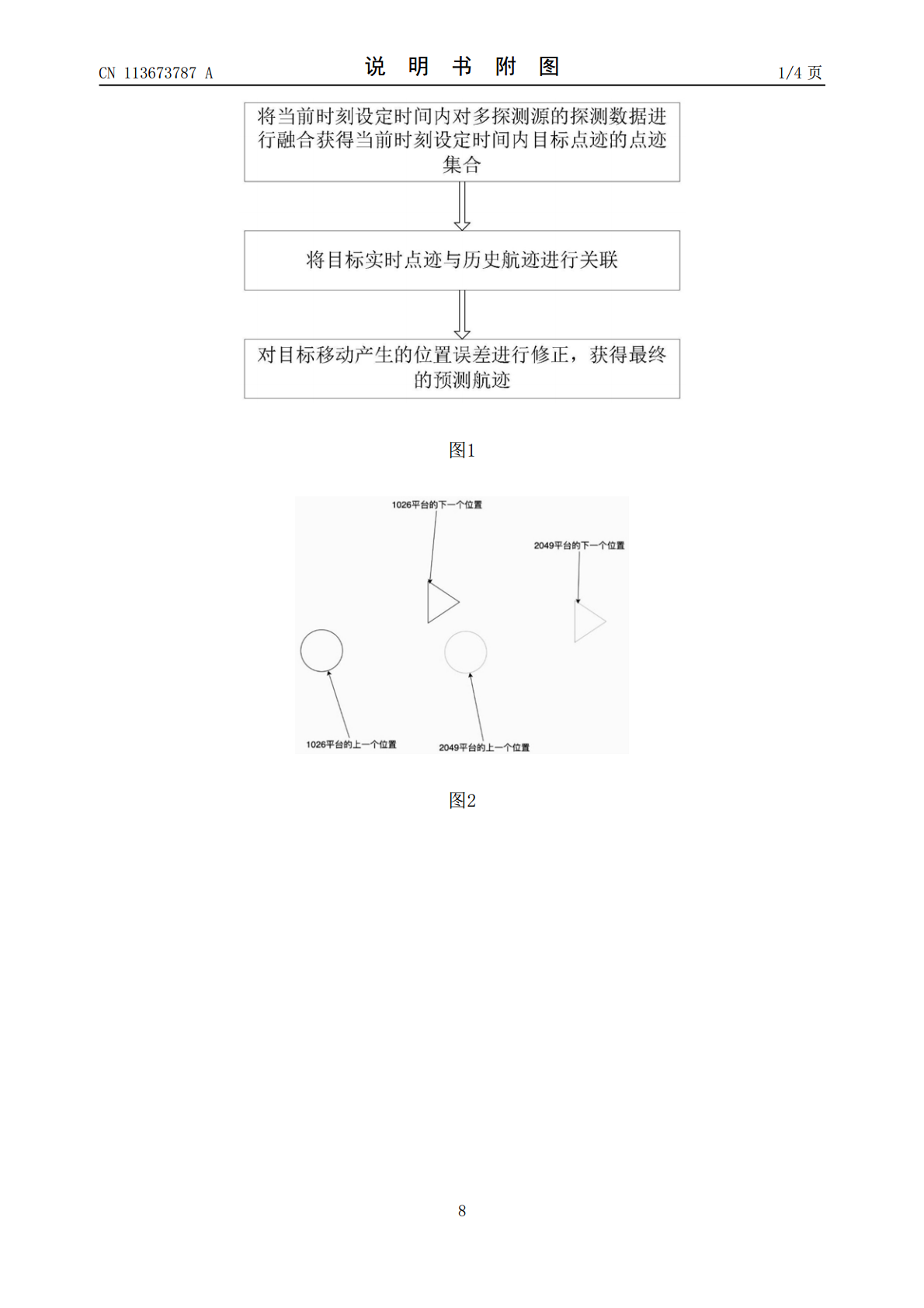
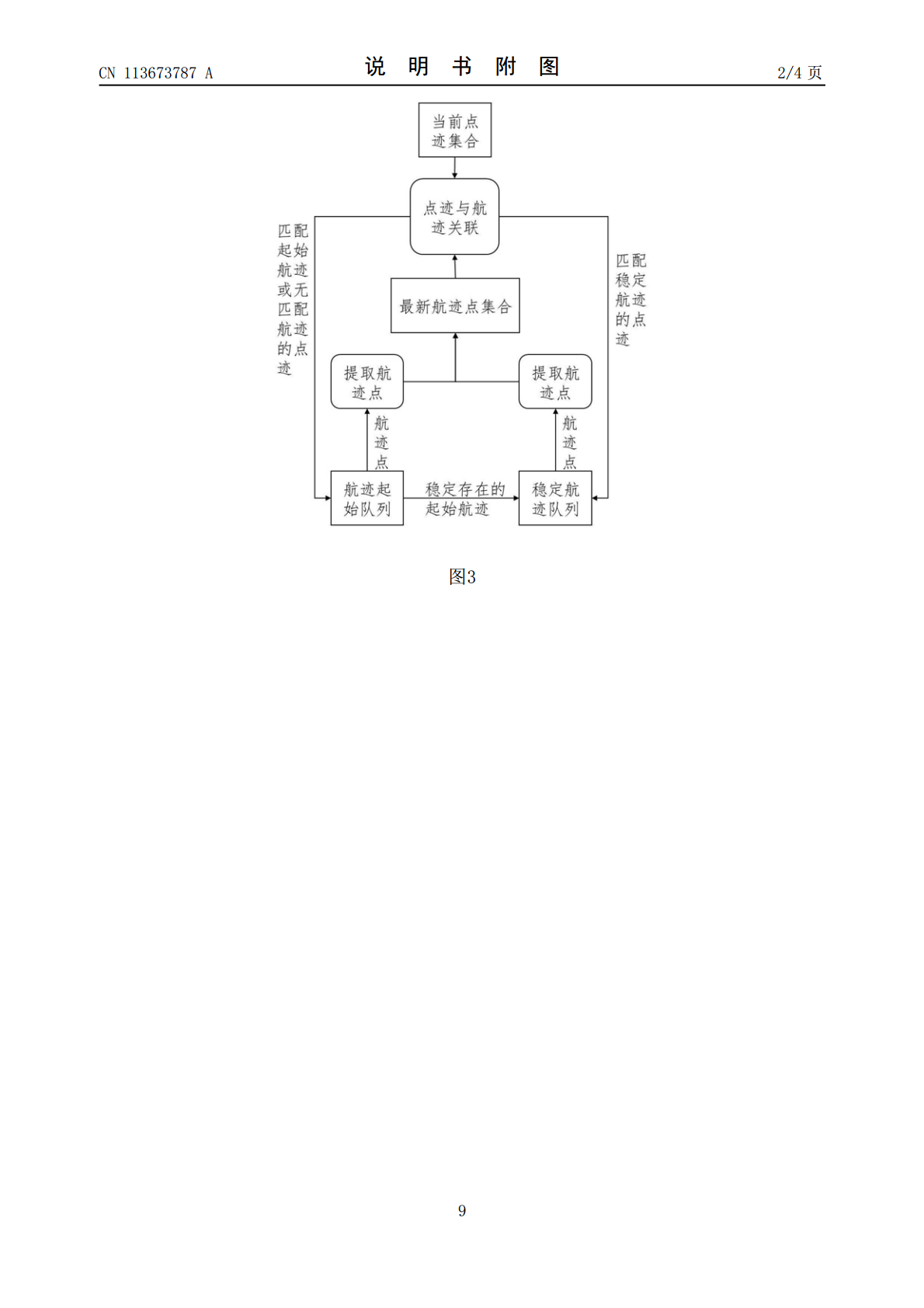
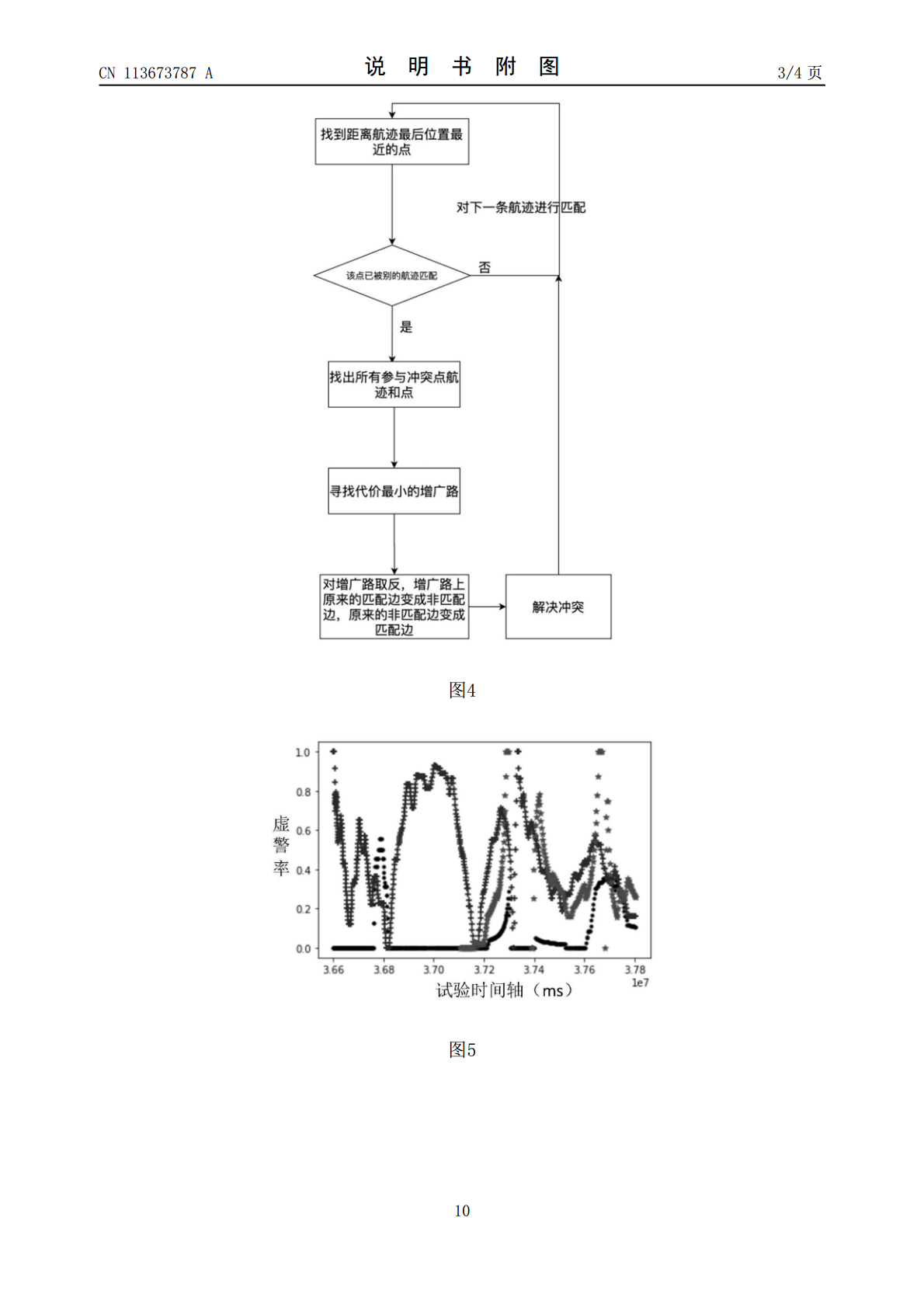
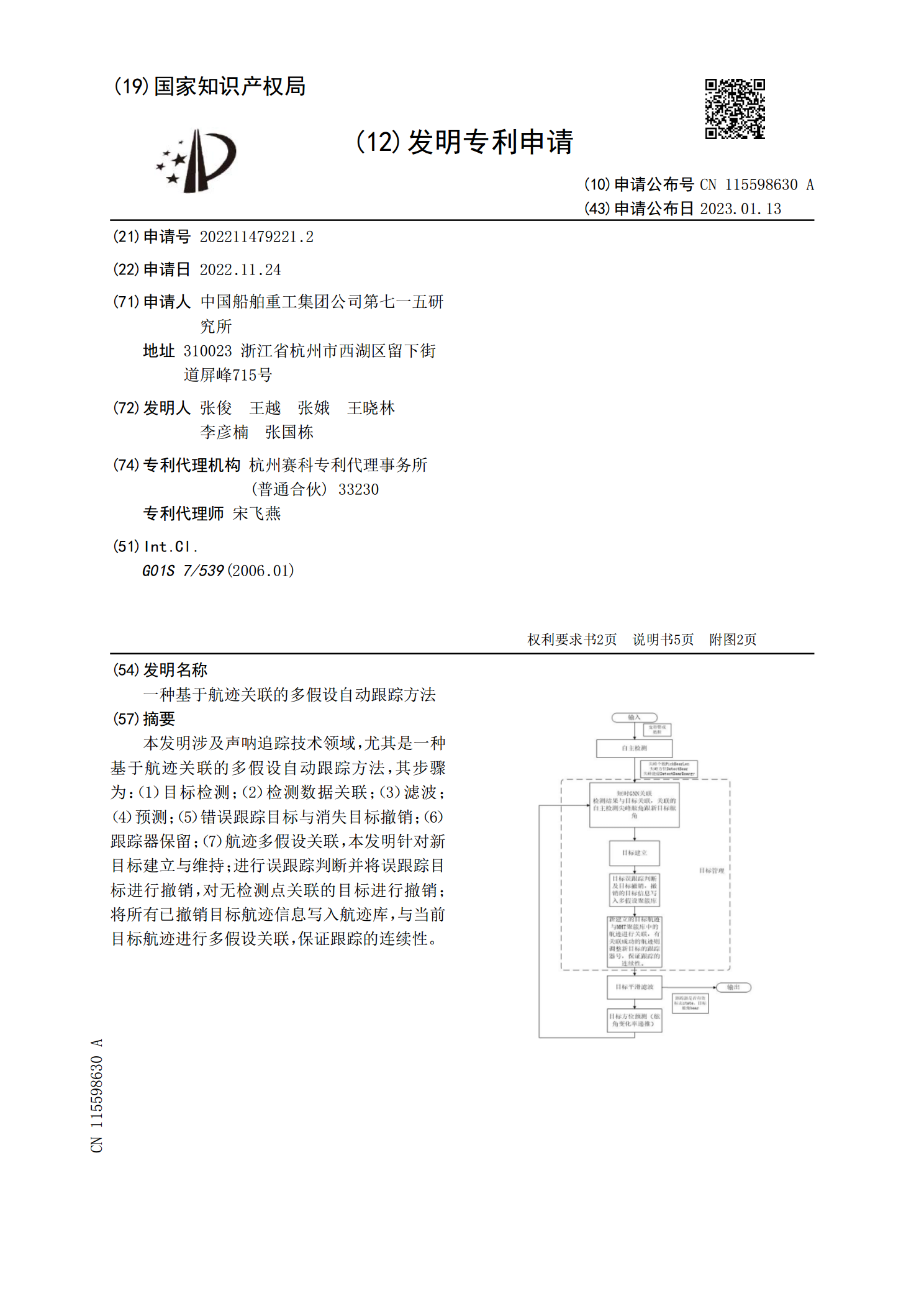
本发明公开了一种无人集群多域探测数据航迹关联与预测方法,该方法包括以下步骤:1)将当前时刻设定时间内对多探测源的探测数据进行融合获得当前时刻设定时间内目标点迹的点迹集合;2)将所有船的历史航迹列表中最新时刻的位置点迹取出形成航迹集合,将所有点迹集合中元素与航迹集合中不同元素匹配的解作为最优二分图匹配,航迹集合中元素和点迹集合元素间的实际距离作为二分图匹配的边权;3)根据步骤2)中的关联完成点迹融合与航迹融合,然后对目标移动产生的位置误差进行修正,获得最终的预测航迹。本发明方法基于二分图匹配和动量拟合,对各
一种基于航迹关联的多假设自动跟踪方法.pdf
本发明涉及声呐追踪技术领域,尤其是一种基于航迹关联的多假设自动跟踪方法,其步骤为:(1)目标检测;(2)检测数据关联;(3)滤波;(4)预测;(5)错误跟踪目标与消失目标撤销;(6)跟踪器保留;(7)航迹多假设关联,本发明针对新目标建立与维持;进行误跟踪判断并将误跟踪目标进行撤销,对无检测点关联的目标进行撤销;将所有已撤销目标航迹信息写入航迹库,与当前目标航迹进行多假设关联,保证跟踪的连续性。

基于数据拟合的航迹关联方法.docx
基于数据拟合的航迹关联方法基于数据拟合的航迹关联方法摘要:航迹关联是航空交通管理(ATM)领域中一个关键的问题,它用于将多个航空器在时间和空间上进行关联,以便进行有效的交通管理。本论文将介绍基于数据拟合的航迹关联方法,重点在于利用数据拟合技术来准确地匹配和关联多个航迹,以提高航空交通的安全性和效率。1.引言航空交通管理涉及到大量航空器在空中的运动,而正确地将这些航迹进行关联对于确保航空安全和提高效率至关重要。传统的航迹关联方法主要基于数学模型或启发式规则,而这些方法在特定条件下可能会出现短板。数据拟合技术
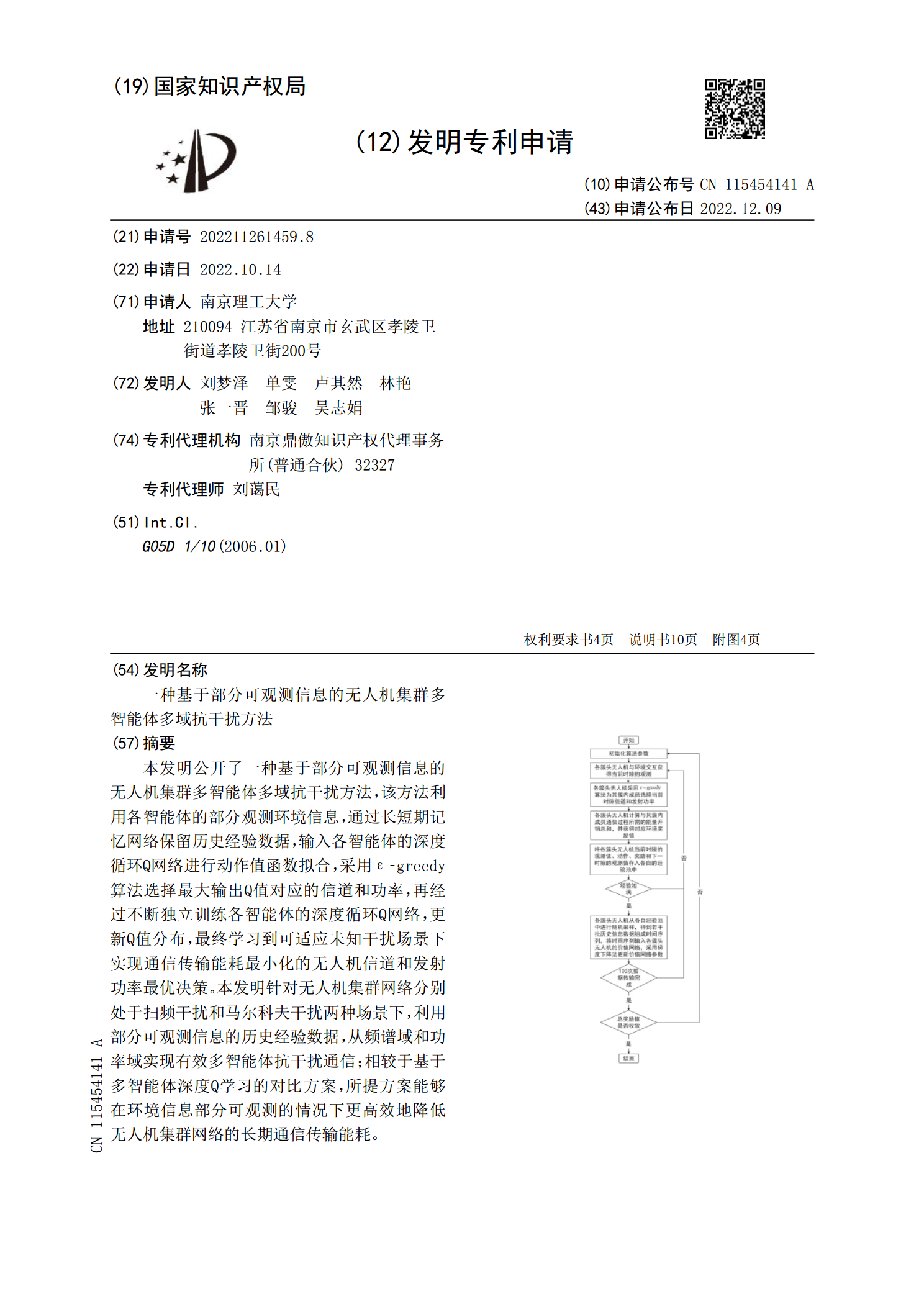
一种基于部分可观测信息的无人机集群多智能体多域抗干扰方法.pdf
本发明公开了一种基于部分可观测信息的无人机集群多智能体多域抗干扰方法,该方法利用各智能体的部分观测环境信息,通过长短期记忆网络保留历史经验数据,输入各智能体的深度循环Q网络进行动作值函数拟合,采用ε?greedy算法选择最大输出Q值对应的信道和功率,再经过不断独立训练各智能体的深度循环Q网络,更新Q值分布,最终学习到可适应未知干扰场景下实现通信传输能耗最小化的无人机信道和发射功率最优决策。本发明针对无人机集群网络分别处于扫频干扰和马尔科夫干扰两种场景下,利用部分可观测信息的历史经验数据,从频谱域和功率域实
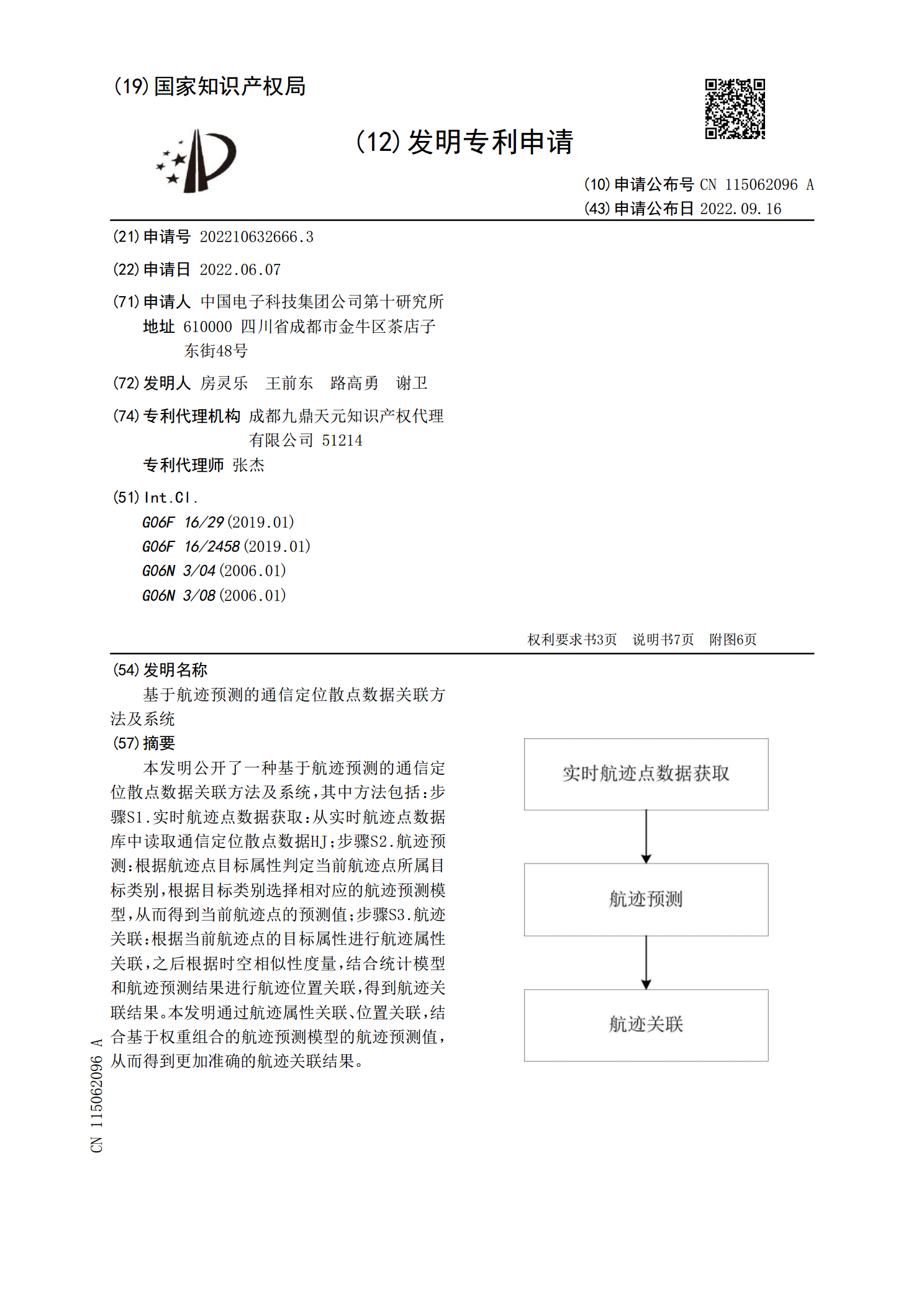
基于航迹预测的通信定位散点数据关联方法及系统.pdf
本发明公开了一种基于航迹预测的通信定位散点数据关联方法及系统,其中方法包括:步骤S1.实时航迹点数据获取:从实时航迹点数据库中读取通信定位散点数据HJ;步骤S2.航迹预测:根据航迹点目标属性判定当前航迹点所属目标类别,根据目标类别选择相对应的航迹预测模型,从而得到当前航迹点的预测值;步骤S3.航迹关联:根据当前航迹点的目标属性进行航迹属性关联,之后根据时空相似性度量,结合统计模型和航迹预测结果进行航迹位置关联,得到航迹关联结果。本发明通过航迹属性关联、位置关联,结合基于权重组合的航迹预测模型的航迹预测值,