
马达的控制装置和方法、马达模块、电动助力转向装置.pdf

高格****gu

1/10
2/10

3/10
4/10
5/10
6/10
7/10
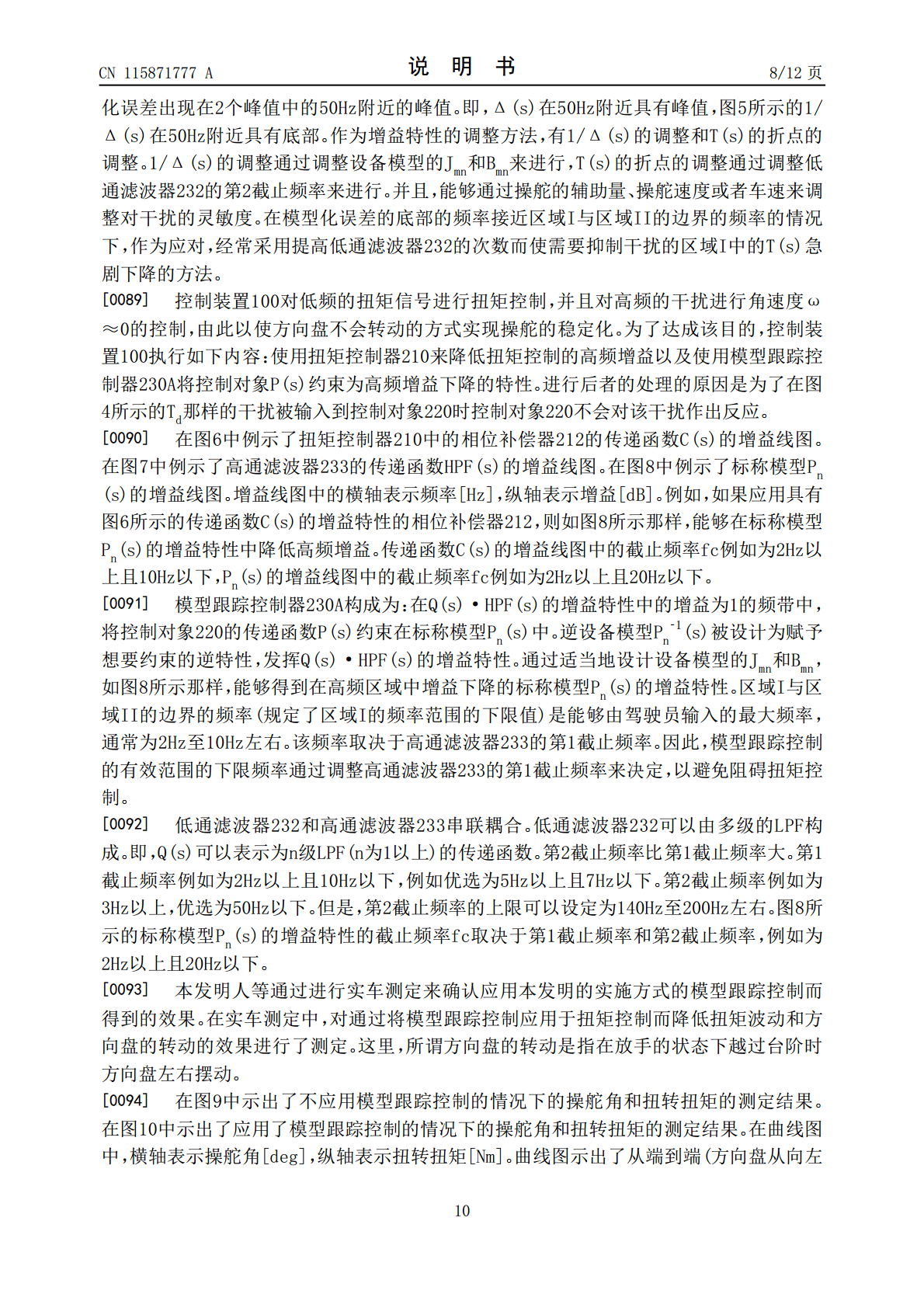
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
马达的控制装置和方法、马达模块、电动助力转向装置.pdf
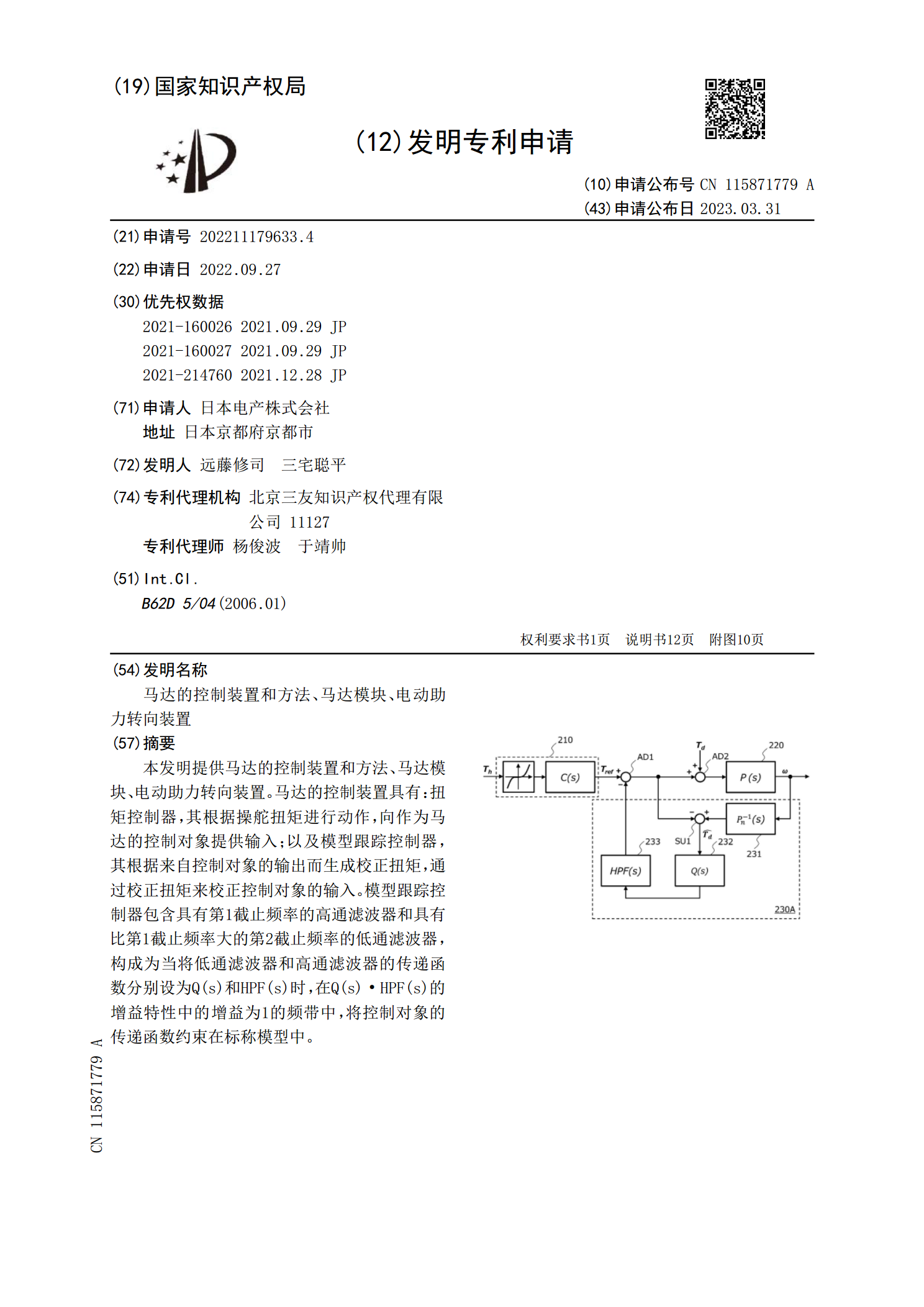
本发明提供马达的控制装置和方法、马达模块、电动助力转向装置。马达的控制装置具有:扭矩控制器,其根据操舵扭矩进行动作,向作为马达的控制对象提供输入;以及模型跟踪控制器,其根据来自控制对象的输出而生成校正扭矩,通过校正扭矩来校正控制对象的输入。模型跟踪控制器包含具有第1截止频率的高通滤波器和具有比第1截止频率大的第2截止频率的低通滤波器,构成为当将低通滤波器和高通滤波器的传递函数分别设为Q(s)和HPF(s)时,在Q(s)·HPF(s)的增益特性中的增益为1的频带中,将控制对象的传递函数约束在标称模型中。
马达的控制装置和方法、马达模块、电动助力转向装置.pdf
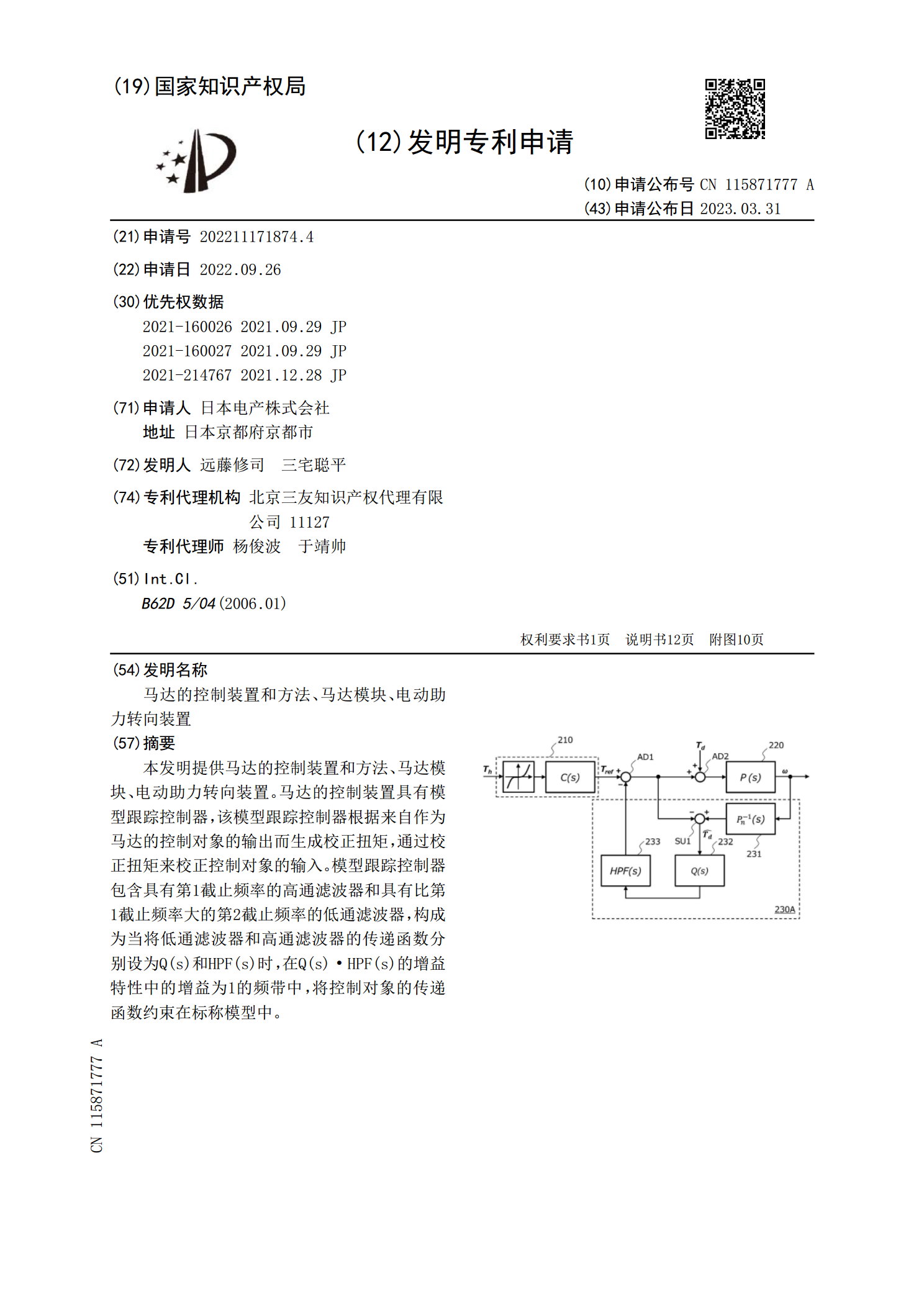
本发明提供马达的控制装置和方法、马达模块、电动助力转向装置。马达的控制装置具有模型跟踪控制器,该模型跟踪控制器根据来自作为马达的控制对象的输出而生成校正扭矩,通过校正扭矩来校正控制对象的输入。模型跟踪控制器包含具有第1截止频率的高通滤波器和具有比第1截止频率大的第2截止频率的低通滤波器,构成为当将低通滤波器和高通滤波器的传递函数分别设为Q(s)和HPF(s)时,在Q(s)·HPF(s)的增益特性中的增益为1的频带中,将控制对象的传递函数约束在标称模型中。
马达和电动助力转向装置.pdf
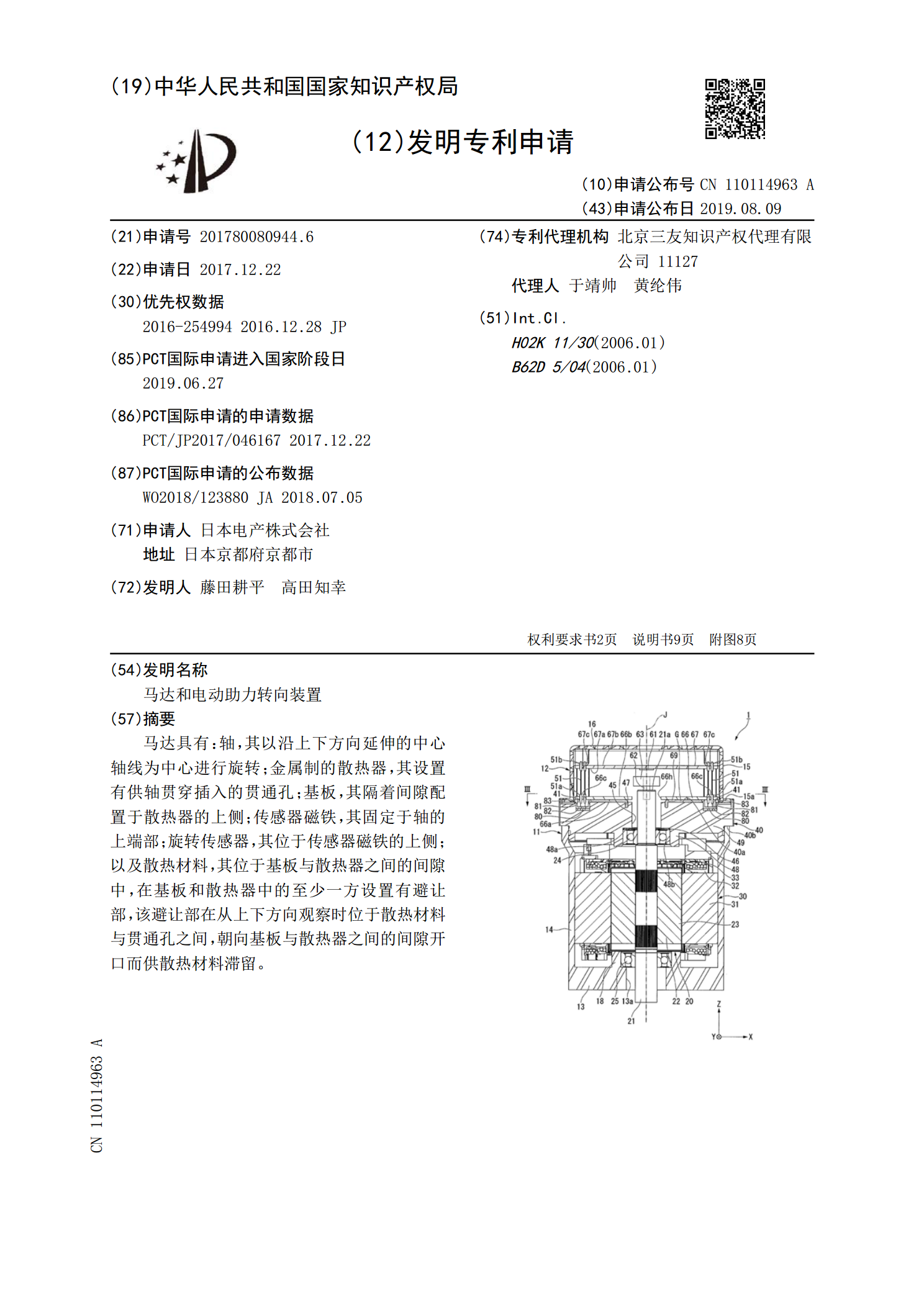
马达具有:轴,其以沿上下方向延伸的中心轴线为中心进行旋转;金属制的散热器,其设置有供轴贯穿插入的贯通孔;基板,其隔着间隙配置于散热器的上侧;传感器磁铁,其固定于轴的上端部;旋转传感器,其位于传感器磁铁的上侧;以及散热材料,其位于基板与散热器之间的间隙中,在基板和散热器中的至少一方设置有避让部,该避让部在从上下方向观察时位于散热材料与贯通孔之间,朝向基板与散热器之间的间隙开口而供散热材料滞留。
电力转换装置、马达驱动单元和电动助力转向装置.pdf
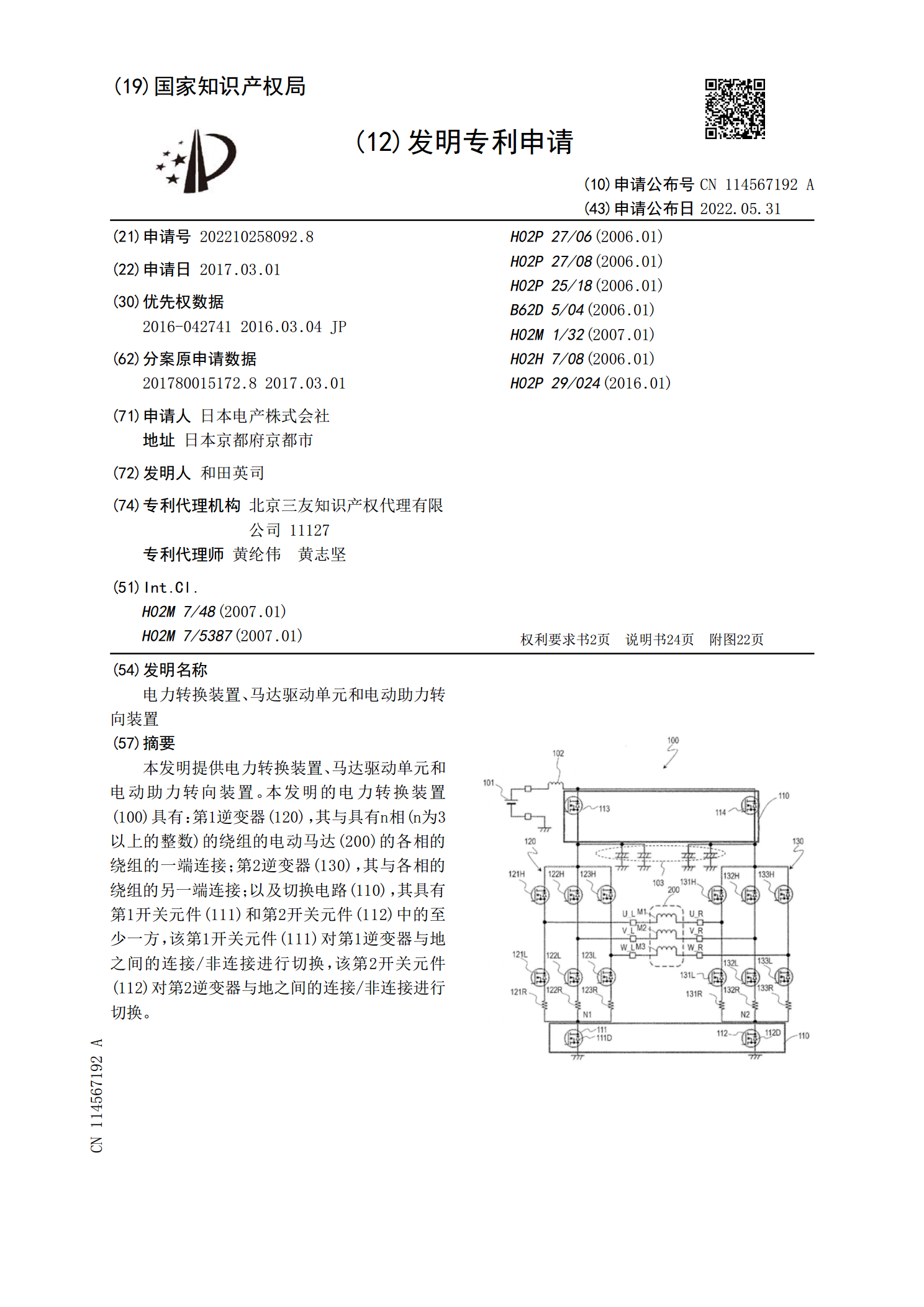
本发明提供电力转换装置、马达驱动单元和电动助力转向装置。本发明的电力转换装置(100)具有:第1逆变器(120),其与具有n相(n为3以上的整数)的绕组的电动马达(200)的各相的绕组的一端连接;第2逆变器(130),其与各相的绕组的另一端连接;以及切换电路(110),其具有第1开关元件(111)和第2开关元件(112)中的至少一方,该第1开关元件(111)对第1逆变器与地之间的连接/非连接进行切换,该第2开关元件(112)对第2逆变器与地之间的连接/非连接进行切换。
电力转换装置、马达驱动单元和电动助力转向装置.pdf
本发明提供电力转换装置、马达驱动单元和电动助力转向装置。本发明的电力转换装置(100)具有:第1逆变器(120),其与具有n相(n为3以上的整数)的绕组的电动马达(200)的各相的绕组的一端连接;第2逆变器(130),其与各相的绕组的另一端连接;以及切换电路(110),其具有第1开关元件(111)和第2开关元件(112)中的至少一方,该第1开关元件(111)对第1逆变器与地之间的连接/非连接进行切换,该第2开关元件(112)对第2逆变器与地之间的连接/非连接进行切换。