
巡检机器人自动充电激光对准系统和对准方法.pdf

元容****少女


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

巡检机器人自动充电激光对准系统和对准方法.pdf
本发明公开了一种巡检机器人自动充电激光对准系统,包括充电桩和巡检机器人,充电桩上安装有相互连接的电极触片、充电桩控制器、充电桩无线收发器和激光发射器,巡检机器人上安装有相互连接的充电电极、机器人控制器、机器人无线收发器和多个横向排列的激光接收器。本发明还公开了一种巡检机器人自动充电激光对准方法,通过机器人控制器对所有激光接收器信号进行实施检测,并根据实际信号来源修改机器人左右位置直至充电电极与电极触片对准,然后移动并充电。本发明利用激光作为对准信号,并利用多个激光接收器实现对准的粗略准备,利用最中间的激光

一种依靠视觉的自动对准充电方法.pdf
本发明公开了一种依靠视觉的自动对准充电方法,其包括无人扫地车、扫地车充电座;无人扫地车的车架后端部螺装左、右侧驱动轮架,左、右侧驱动轮架下端部分别装设轮毂电机,车架还装设控制器、供电电池、摄像头、扫地车触条;扫地车充电座正面装设充电座触条、两个图案标示;该依靠视觉的自动对准充电方法包括有以下步骤:a、开启摄像头;b、调整远动;c、控制器判断摄像头是否获取扫地车充电座的图案标示;d、检测扫地车充电座相对无人扫地车的方向范围;e、调整运动;f、控制器判断左右两个图案标示是否在图像中心对称分布;g、后退;h、控

无线充电线圈对准方法、装置及系统.pdf
本发明公开了一种无线充电线圈对准方法、装置及系统,其中无线充电线圈对准方法包括以下步骤:获取供电端线圈和/或车辆端线圈充电相关的电气参数;根据电气参数,调整供电端线圈在水平方向上的位置;判断电气参数值是否达到预设电气阈值和/或调整次数是否达到预设最大值时,若是,充电线圈对准完毕,若否,则循环上述步骤。本发明技术方案加快了无线充电线圈对准速度,提高了充电效率。
无线充电的线圈对准方法、系统及无线充电发射装置.pdf
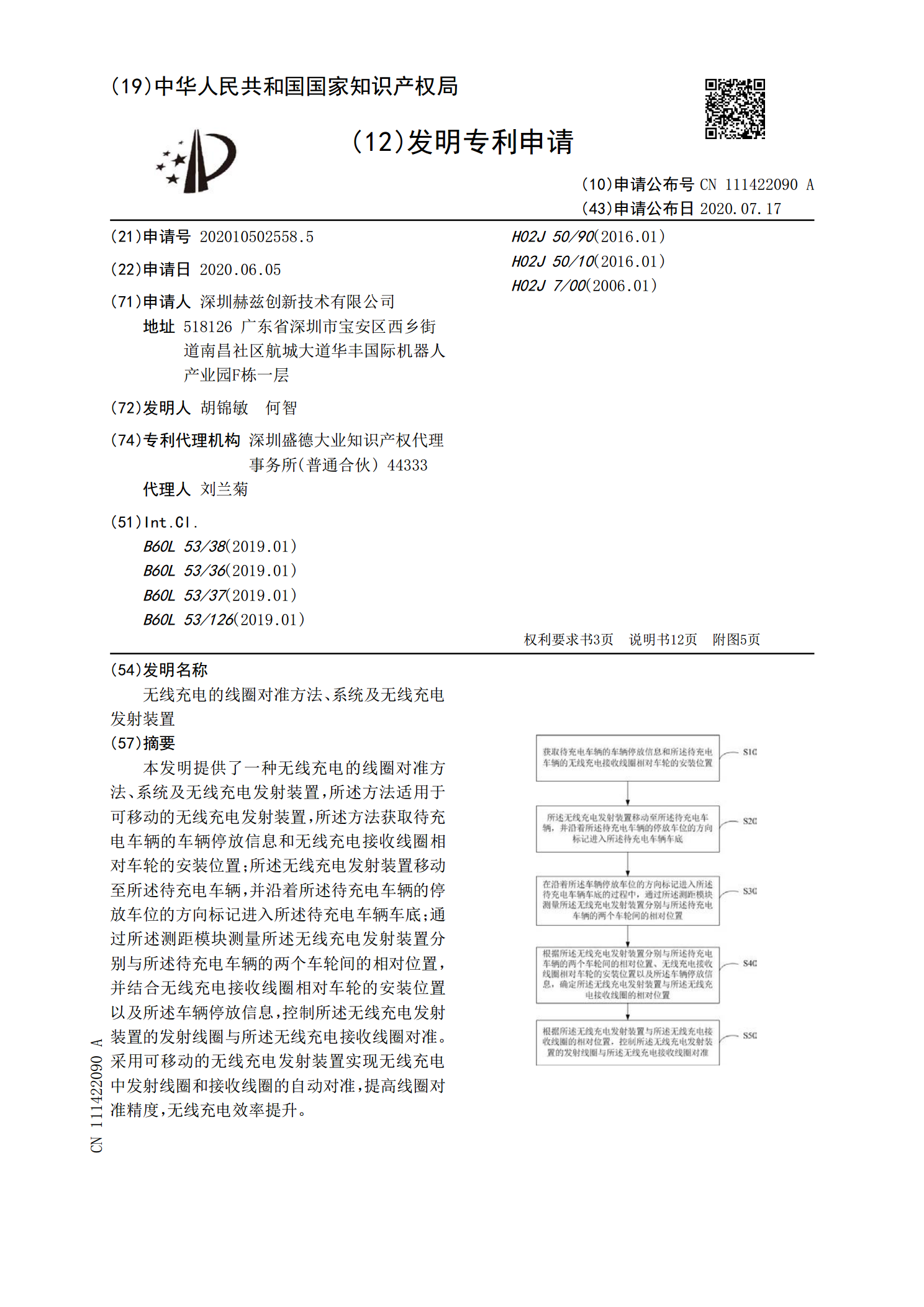
本发明提供了一种无线充电的线圈对准方法、系统及无线充电发射装置,所述方法适用于可移动的无线充电发射装置,所述方法获取待充电车辆的车辆停放信息和无线充电接收线圈相对车轮的安装位置;所述无线充电发射装置移动至所述待充电车辆,并沿着所述待充电车辆的停放车位的方向标记进入所述待充电车辆车底;通过所述测距模块测量所述无线充电发射装置分别与所述待充电车辆的两个车轮间的相对位置,并结合无线充电接收线圈相对车轮的安装位置以及所述车辆停放信息,控制所述无线充电发射装置的发射线圈与所述无线充电接收线圈对准。采用可移动的无线充
一种被动式自动对准充电方法.pdf
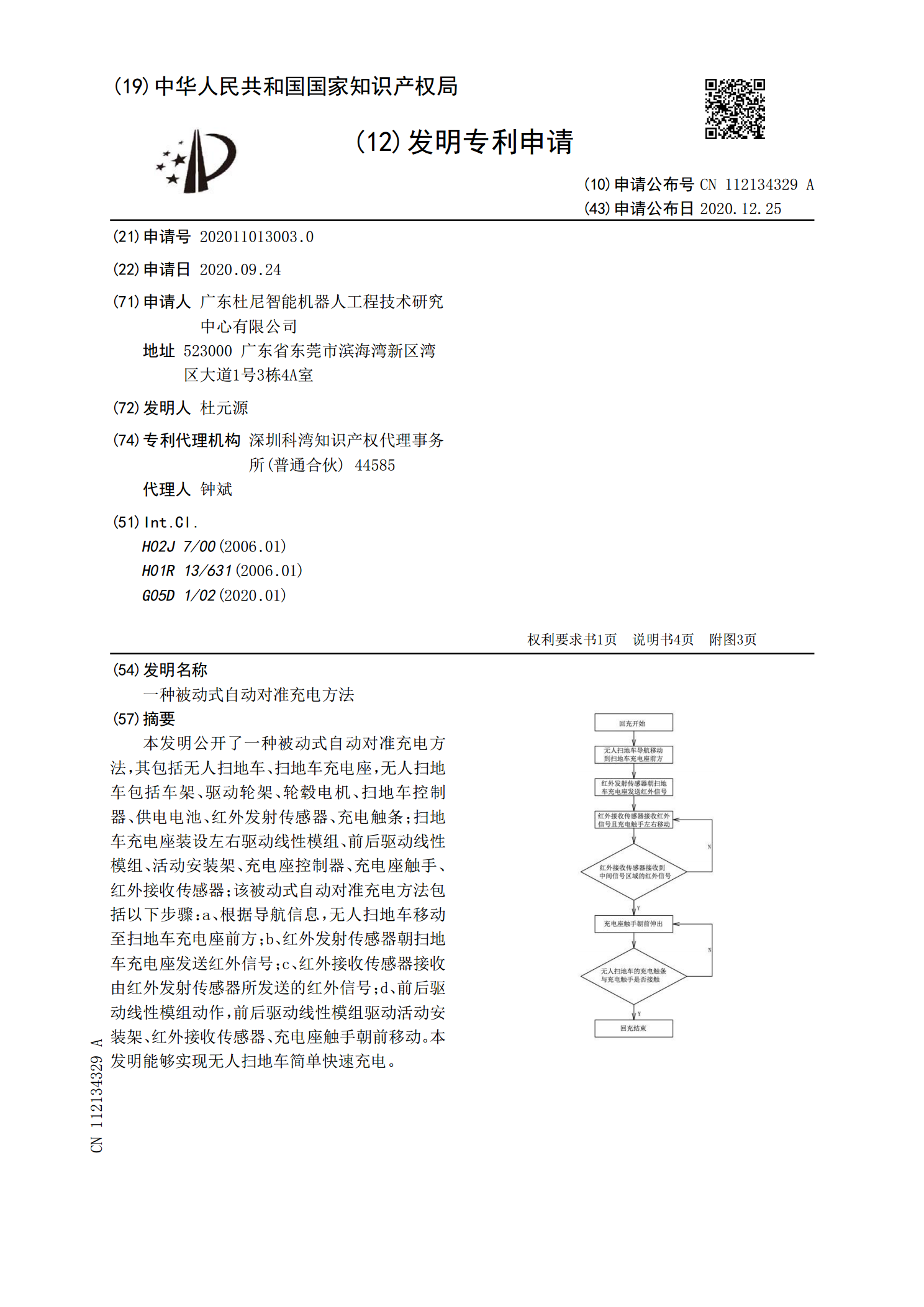
本发明公开了一种被动式自动对准充电方法,其包括无人扫地车、扫地车充电座,无人扫地车包括车架、驱动轮架、轮毂电机、扫地车控制器、供电电池、红外发射传感器、充电触条;扫地车充电座装设左右驱动线性模组、前后驱动线性模组、活动安装架、充电座控制器、充电座触手、红外接收传感器;该被动式自动对准充电方法包括以下步骤:a、根据导航信息,无人扫地车移动至扫地车充电座前方;b、红外发射传感器朝扫地车充电座发送红外信号;c、红外接收传感器接收由红外发射传感器所发送的红外信号;d、前后驱动线性模组动作,前后驱动线性模组驱动活动