
一种考虑海浪干扰的无人艇回收分布式决策仿真系统.pdf

邻家****曼玉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种考虑海浪干扰的无人艇回收分布式决策仿真系统.pdf
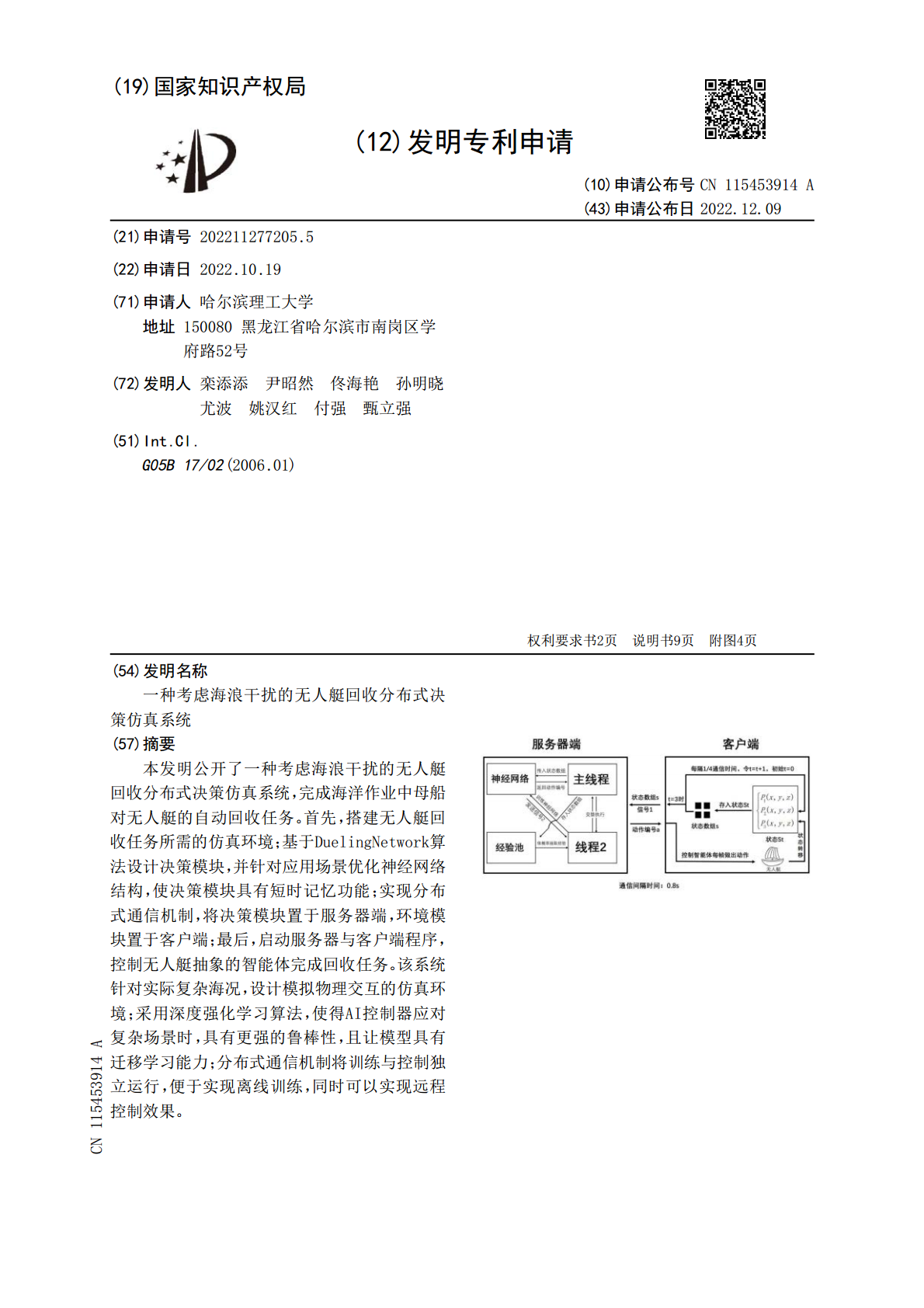
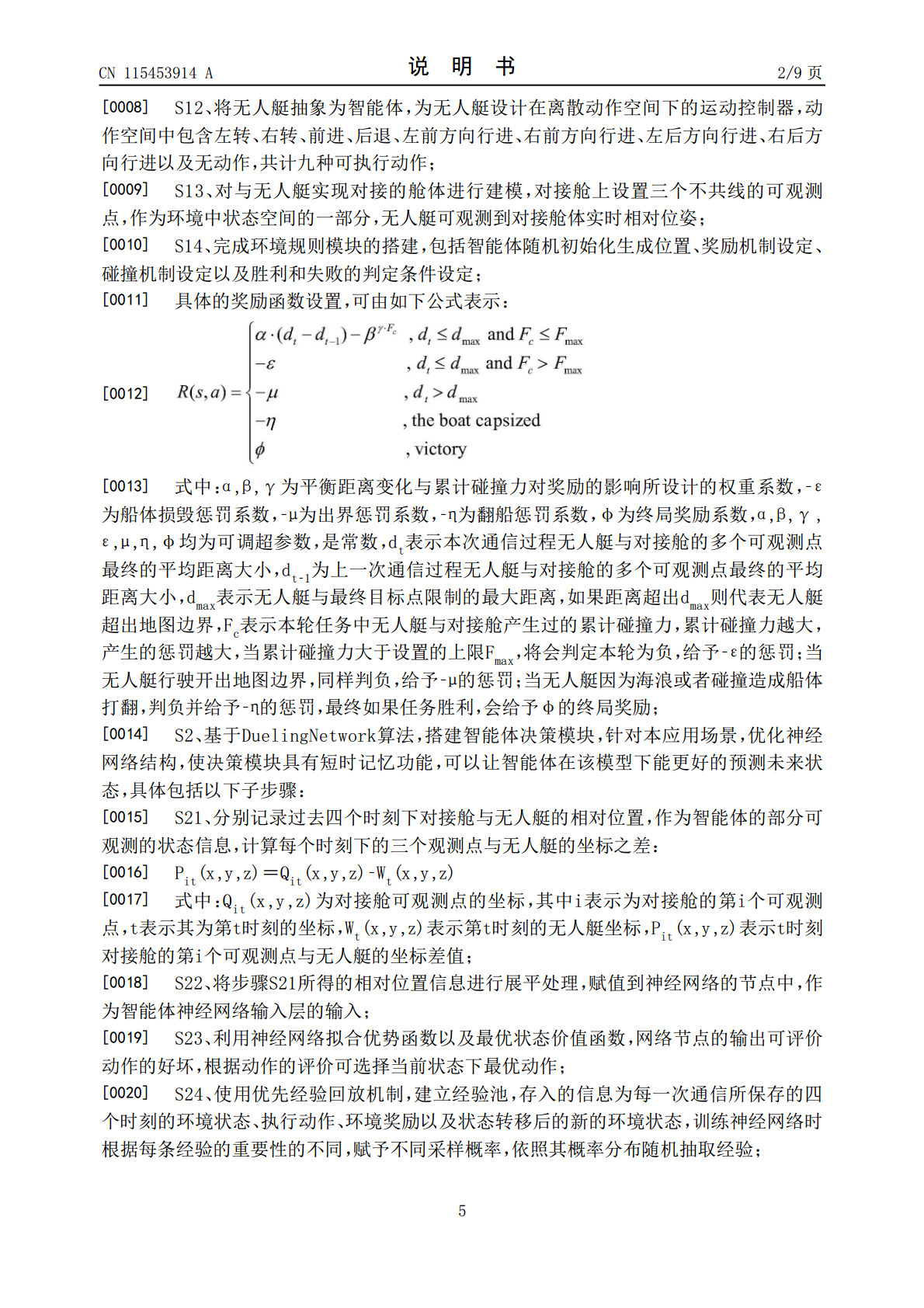
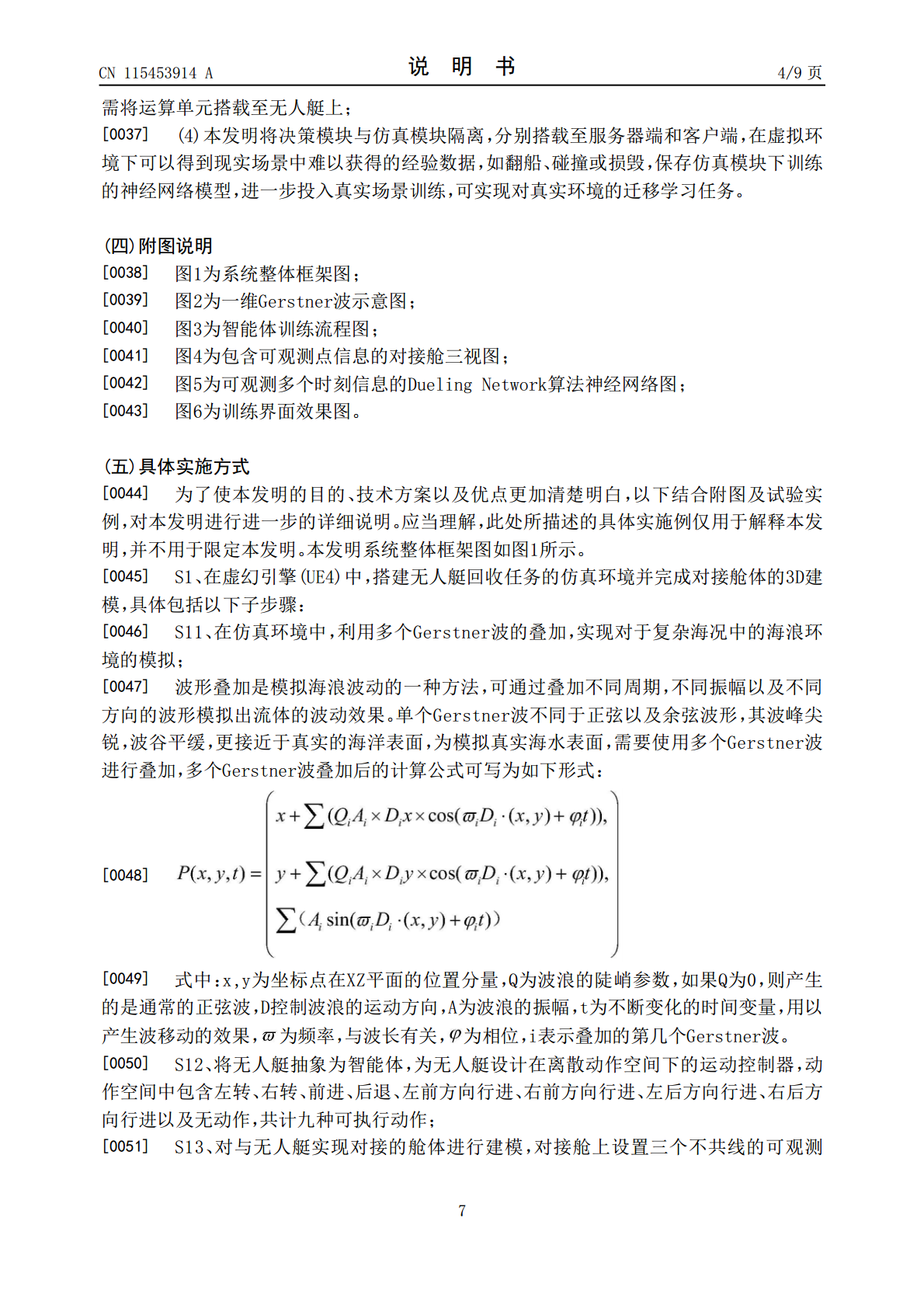
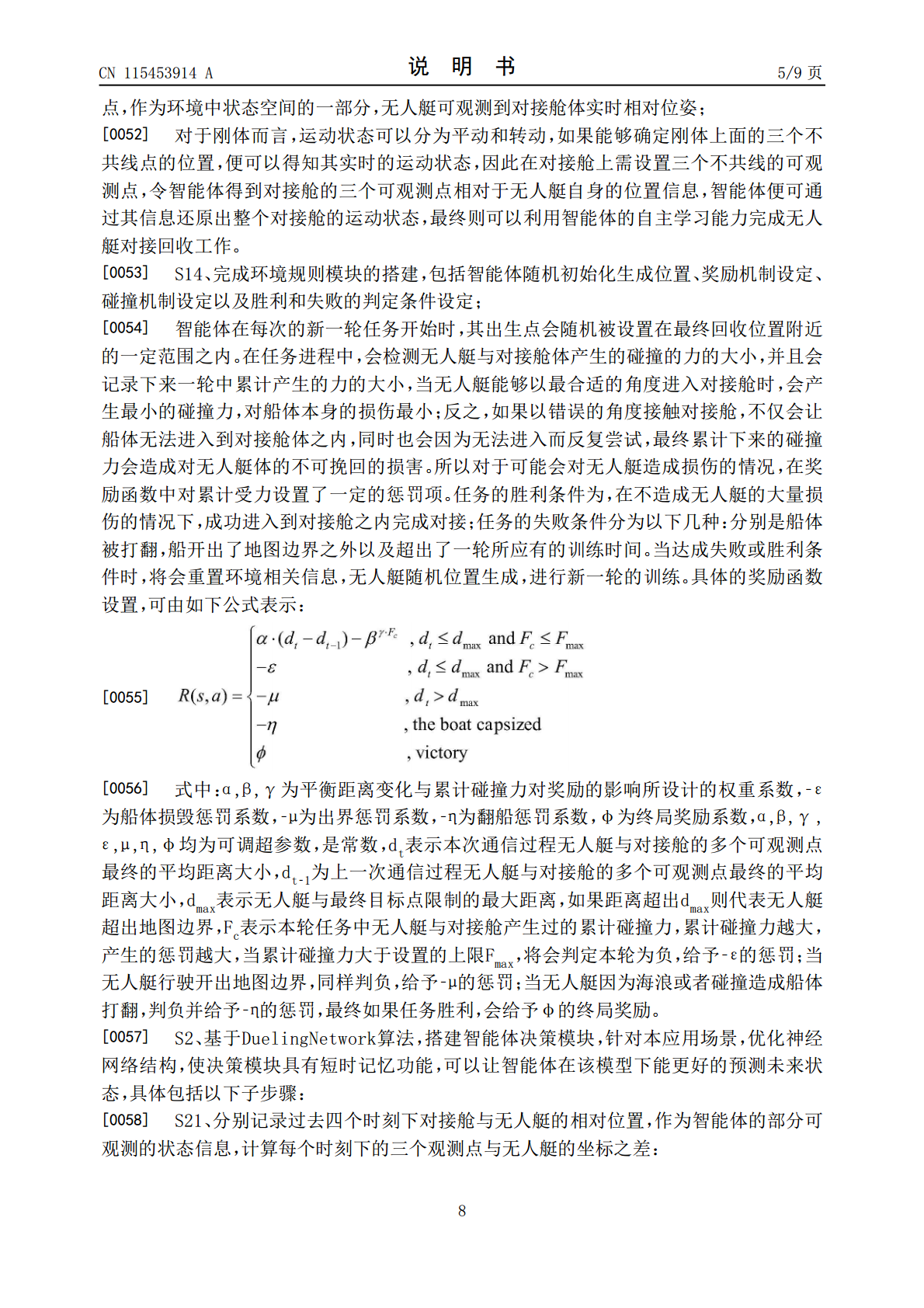
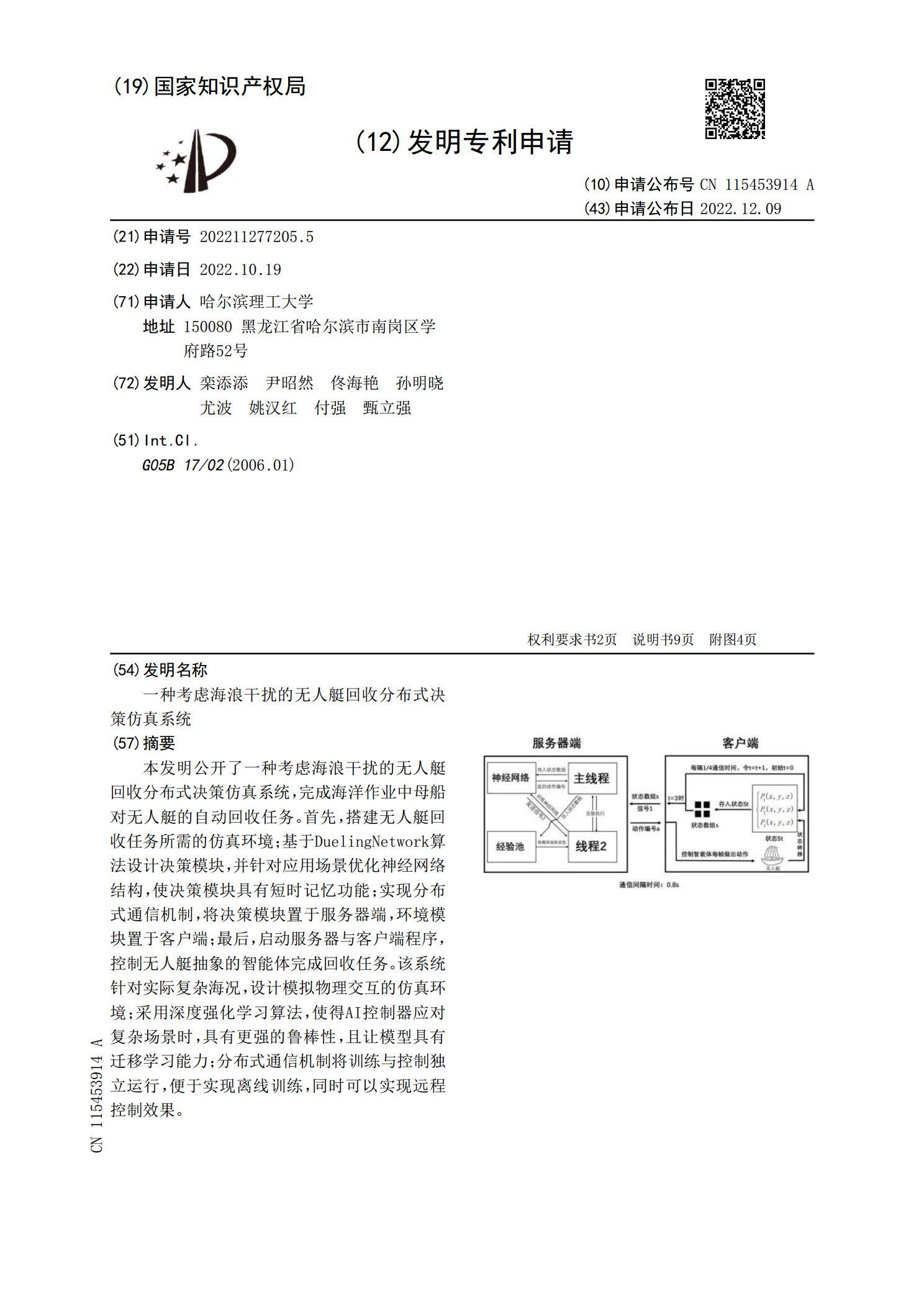
本发明公开了一种考虑海浪干扰的无人艇回收分布式决策仿真系统,完成海洋作业中母船对无人艇的自动回收任务。首先,搭建无人艇回收任务所需的仿真环境;基于DuelingNetwork算法设计决策模块,并针对应用场景优化神经网络结构,使决策模块具有短时记忆功能;实现分布式通信机制,将决策模块置于服务器端,环境模块置于客户端;最后,启动服务器与客户端程序,控制无人艇抽象的智能体完成回收任务。该系统针对实际复杂海况,设计模拟物理交互的仿真环境;采用深度强化学习算法,使得AI控制器应对复杂场景时,具有更强的鲁棒性,且让模
一种考虑海浪遭遇角度的水面无人艇智能航迹控制方法.pdf
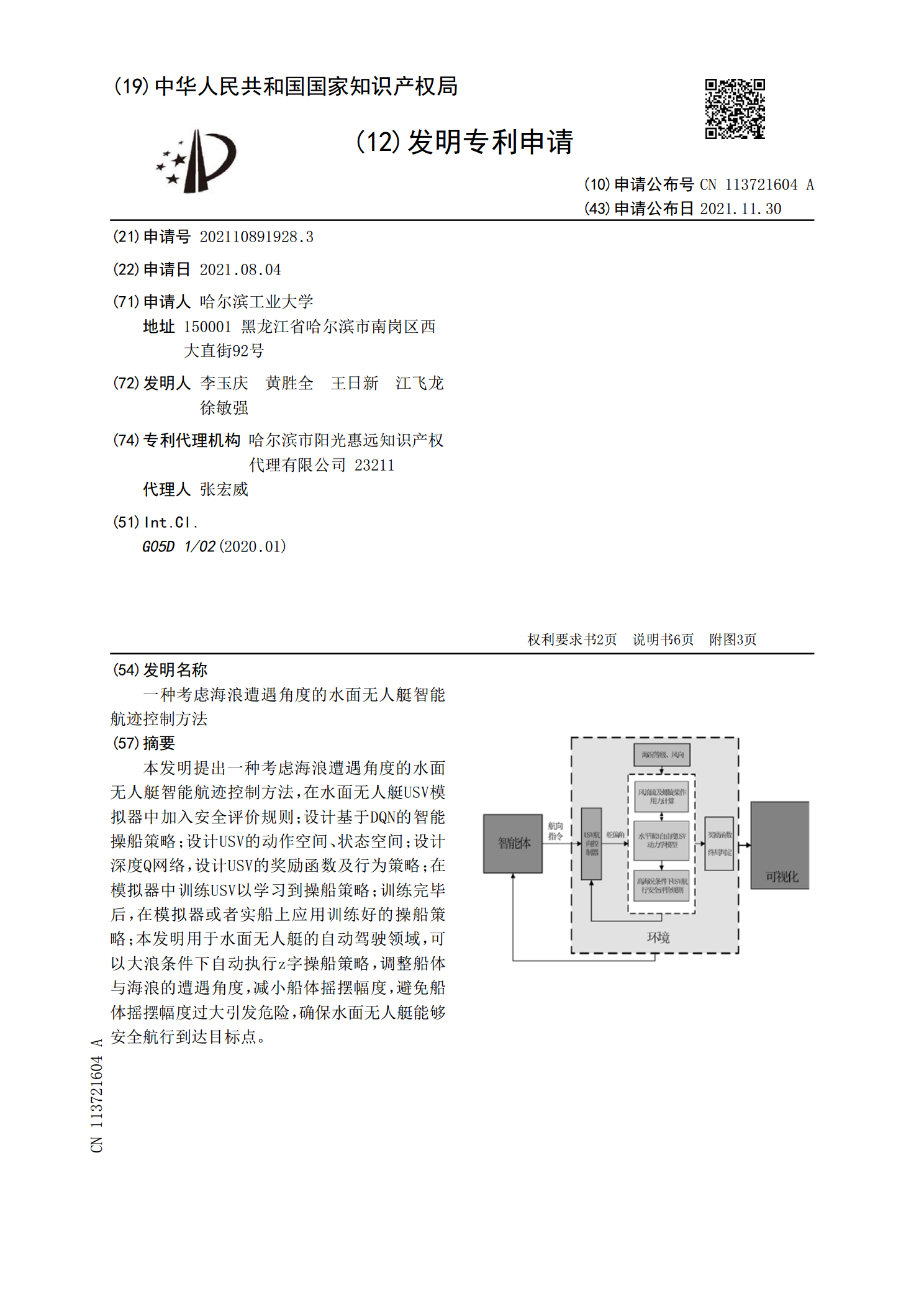
本发明提出一种考虑海浪遭遇角度的水面无人艇智能航迹控制方法,在水面无人艇USV模拟器中加入安全评价规则;设计基于DQN的智能操船策略;设计USV的动作空间、状态空间;设计深度Q网络,设计USV的奖励函数及行为策略;在模拟器中训练USV以学习到操船策略;训练完毕后,在模拟器或者实船上应用训练好的操船策略;本发明用于水面无人艇的自动驾驶领域,可以大浪条件下自动执行z字操船策略,调整船体与海浪的遭遇角度,减小船体摇摆幅度,避免船体摇摆幅度过大引发危险,确保水面无人艇能够安全航行到达目标点。
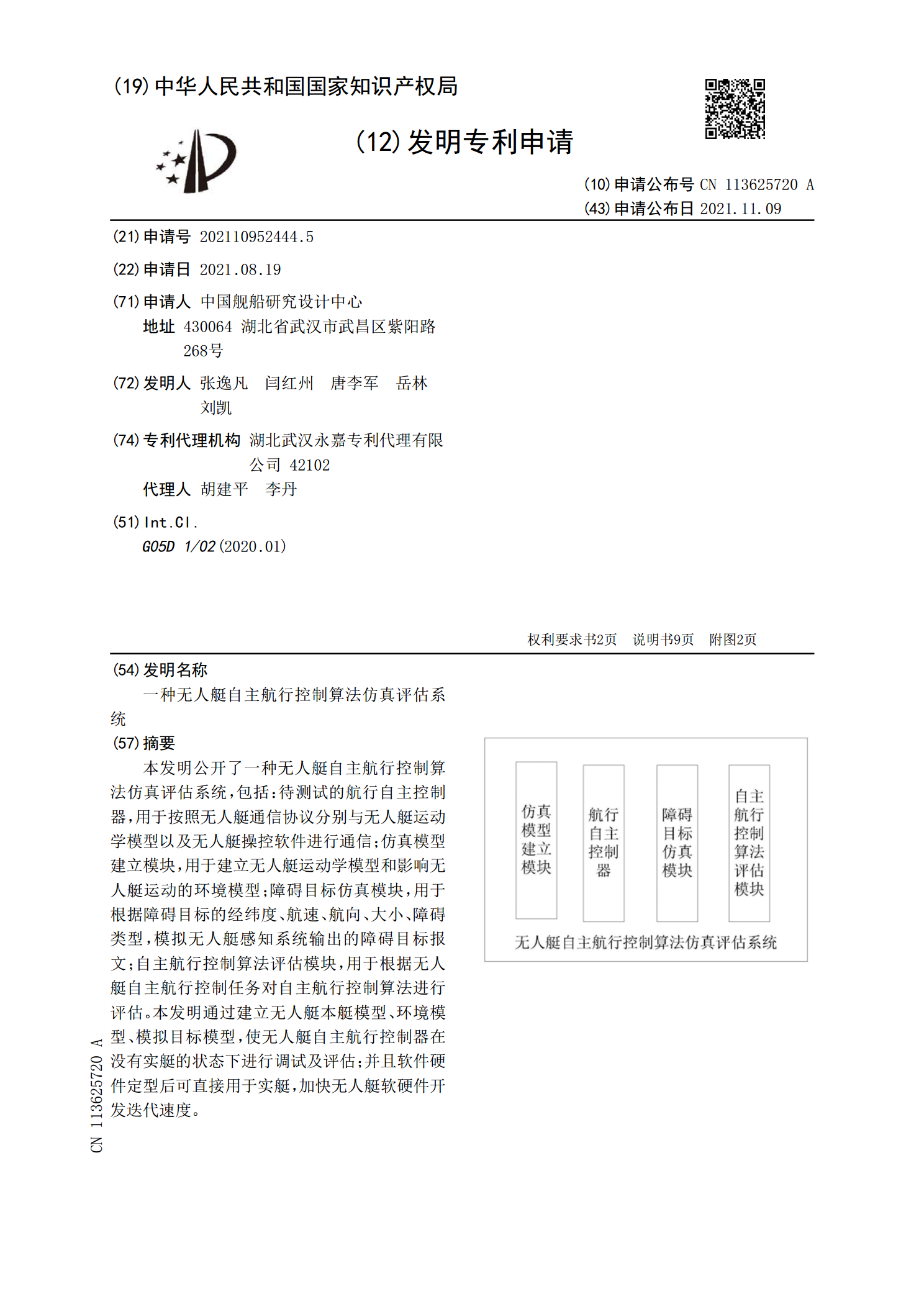
一种无人艇自主航行控制算法仿真评估系统.pdf
本发明公开了一种无人艇自主航行控制算法仿真评估系统,包括:待测试的航行自主控制器,用于按照无人艇通信协议分别与无人艇运动学模型以及无人艇操控软件进行通信;仿真模型建立模块,用于建立无人艇运动学模型和影响无人艇运动的环境模型;障碍目标仿真模块,用于根据障碍目标的经纬度、航速、航向、大小、障碍类型,模拟无人艇感知系统输出的障碍目标报文;自主航行控制算法评估模块,用于根据无人艇自主航行控制任务对自主航行控制算法进行评估。本发明通过建立无人艇本艇模型、环境模型、模拟目标模型,使无人艇自主航行控制器在没有实艇的状态
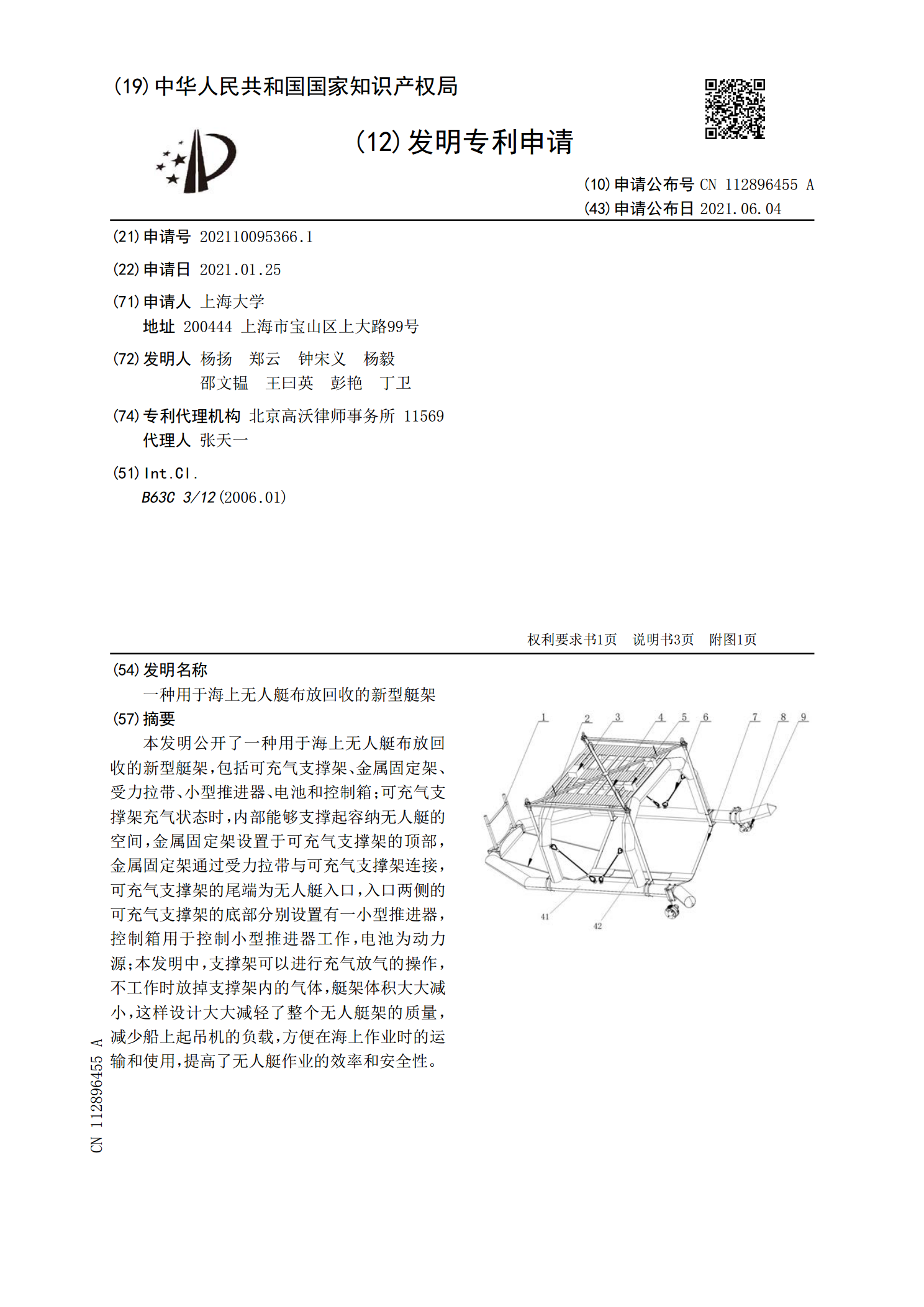
一种用于海上无人艇布放回收的新型艇架.pdf
本发明公开了一种用于海上无人艇布放回收的新型艇架,包括可充气支撑架、金属固定架、受力拉带、小型推进器、电池和控制箱;可充气支撑架充气状态时,内部能够支撑起容纳无人艇的空间,金属固定架设置于可充气支撑架的顶部,金属固定架通过受力拉带与可充气支撑架连接,可充气支撑架的尾端为无人艇入口,入口两侧的可充气支撑架的底部分别设置有一小型推进器,控制箱用于控制小型推进器工作,电池为动力源;本发明中,支撑架可以进行充气放气的操作,不工作时放掉支撑架内的气体,艇架体积大大减小,这样设计大大减轻了整个无人艇架的质量,减少船上
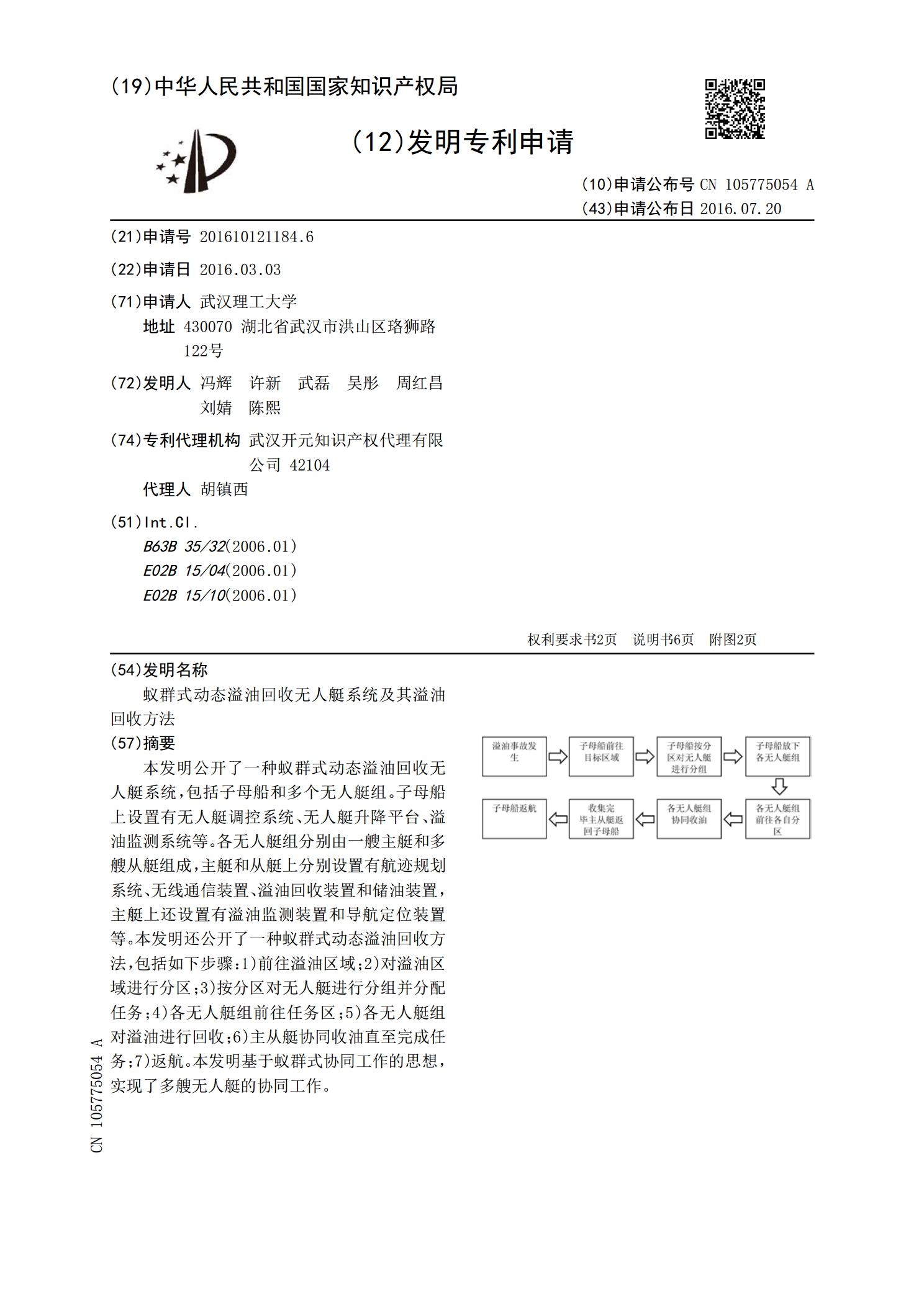
蚁群式动态溢油回收无人艇系统及其溢油回收方法.pdf
本发明公开了一种蚁群式动态溢油回收无人艇系统,包括子母船和多个无人艇组。子母船上设置有无人艇调控系统、无人艇升降平台、溢油监测系统等。各无人艇组分别由一艘主艇和多艘从艇组成,主艇和从艇上分别设置有航迹规划系统、无线通信装置、溢油回收装置和储油装置,主艇上还设置有溢油监测装置和导航定位装置等。本发明还公开了一种蚁群式动态溢油回收方法,包括如下步骤:1)前往溢油区域;2)对溢油区域进行分区;3)按分区对无人艇进行分组并分配任务;4)各无人艇组前往任务区;5)各无人艇组对溢油进行回收;6)主从艇协同收油直至完成