
手表外壳工件的正反姿态判断的单目机器视觉方法.pdf

一条****淑淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

手表外壳工件的正反姿态判断的单目机器视觉方法.pdf
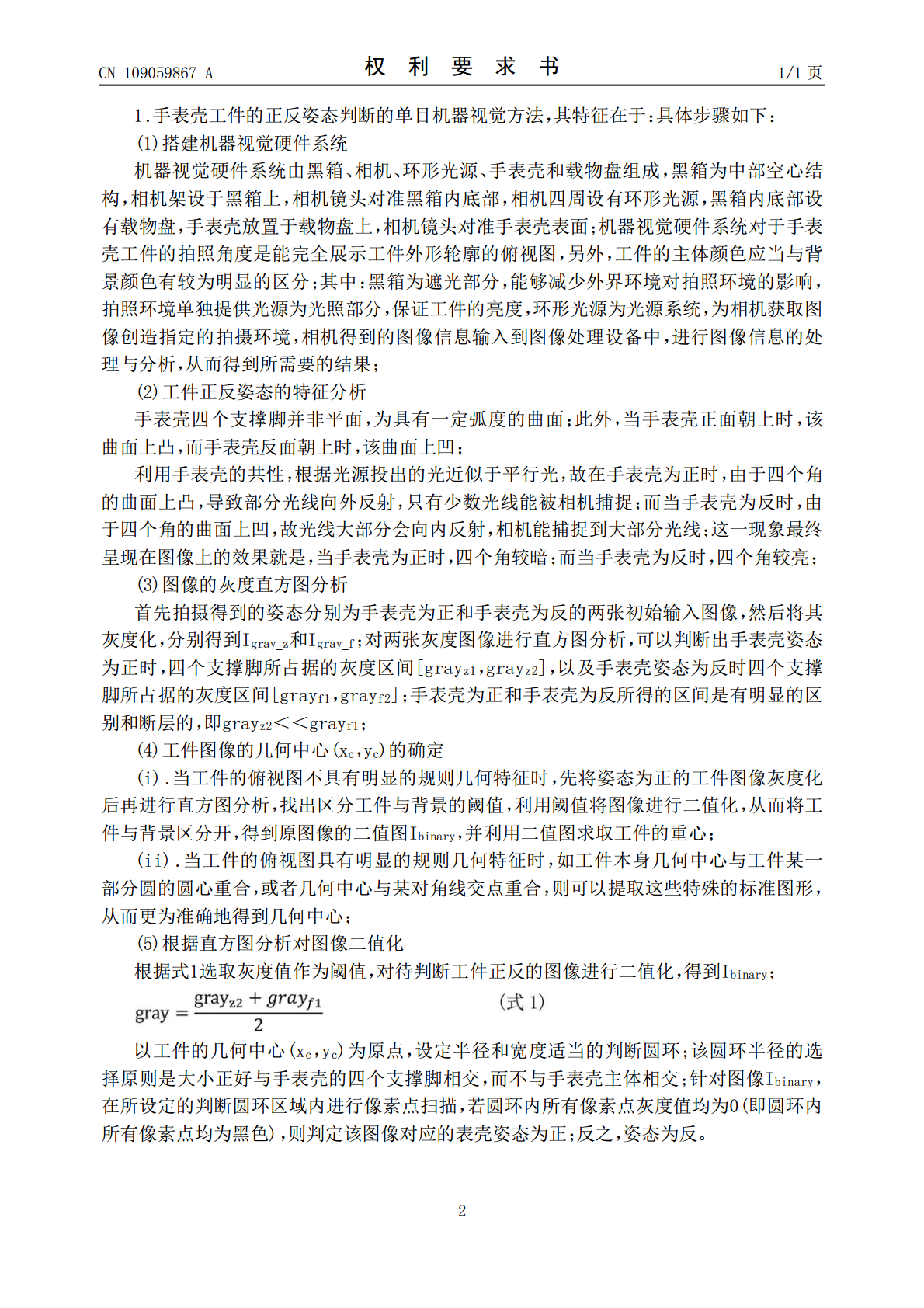
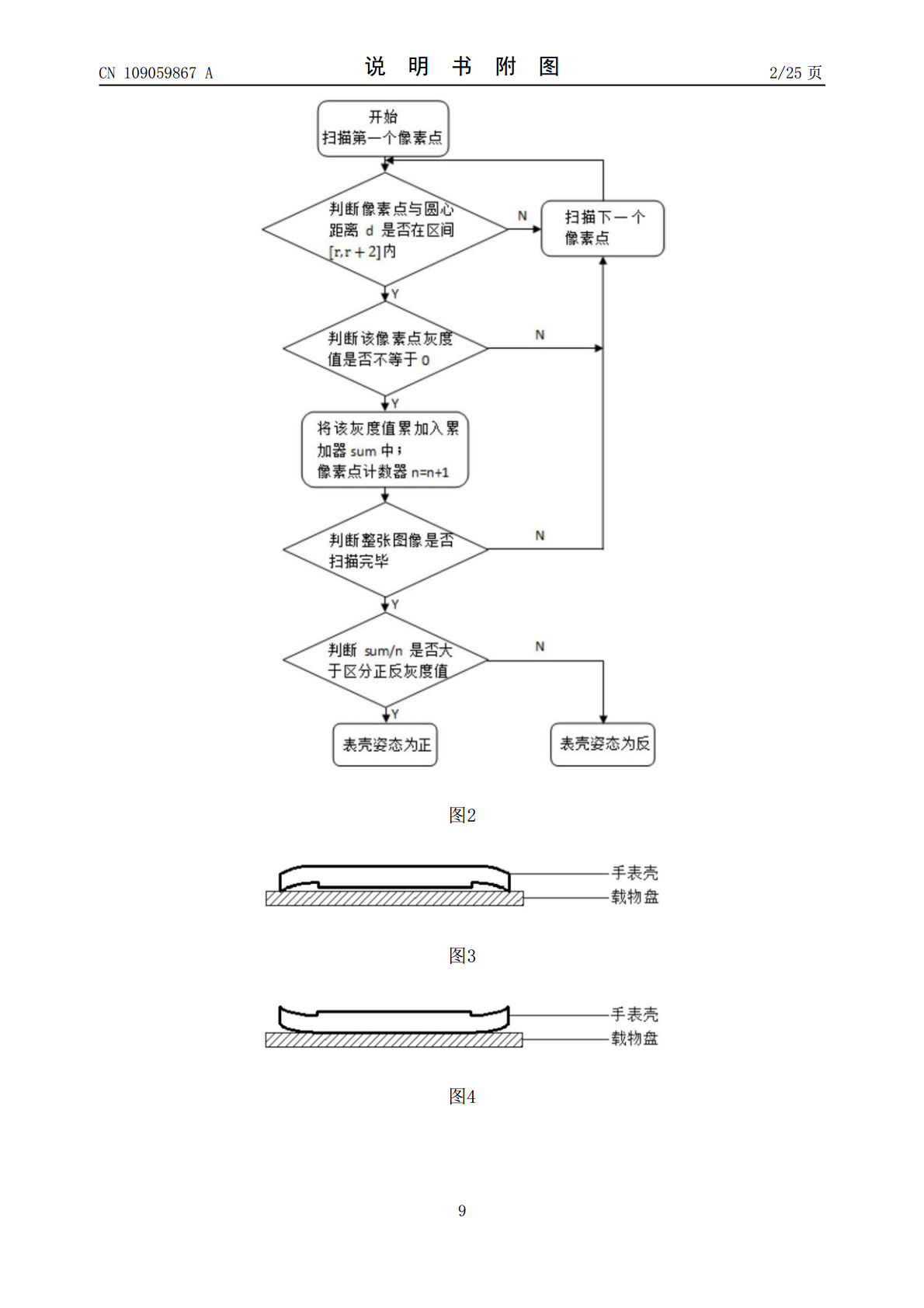
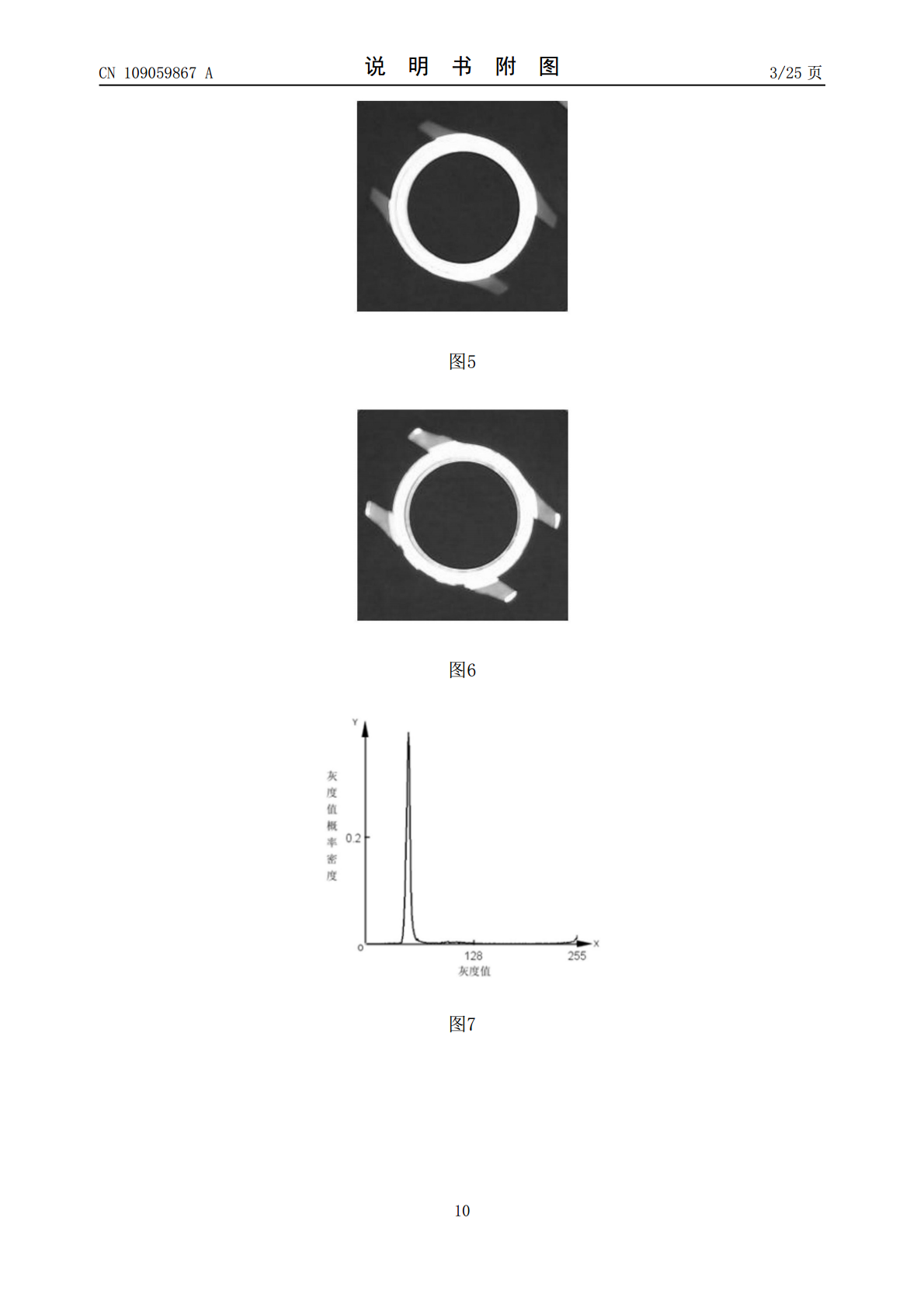
本发明涉及手表外壳工件的正反姿态判断的单目机器视觉方法。本发明视觉系统的拍照角度是工件的俯视图,同时利用基于OpenCV的库函数来判断手表壳的正反姿态。该方法抗干扰性强,对硬件设备要求不高,判断正确率很高。将本视觉系统应用于具有判断手表壳工件的正反姿态任务的流水线上会显著提高流水线的工作效率,实现机器代替人眼识别从而实现生产自动化。
表壳正反姿态判断的单目机器视觉方法.pptx
,目录PartOnePartTwo背景介绍姿态判断的意义姿态判断的应用场景PartThree单目机器视觉原理表壳正反姿态判断的难点姿态判断的精度要求PartFour图像采集图像预处理表壳特征提取正反姿态判断算法姿态判断结果输出PartFive实验数据来源与处理实验结果展示结果分析误差来源与改进方向PartSix研究结论研究不足与展望THANKS

基于单目显微视觉的微球姿态测量方法.docx
基于单目显微视觉的微球姿态测量方法基于单目显微视觉的微球姿态测量方法摘要本文介绍了一种基于单目显微视觉的微球姿态测量方法。该方法通过分析球的图像特征来计算出球的姿态角度,准确度高,可应用于纳米粒子的研究。关键词:单目显微视觉,微球姿态测量,图像处理,粒子分析引言微球是微纳米领域中常用的粒子。研究微球的姿态可以得到关于微观结构和物质性质的信息。因此,发展一种可靠的微球姿态测量方法是非常重要的。目前已有不少研究采用了基于双目或多目相机的姿态测量方法。然而,由于设备复杂,价格昂贵,这些方法并不适用于低成本的研究

单目立体视觉测量系统位置姿态校准方法、装置、系统.pdf
本发明涉及视觉测量以及图像检测技术领域,提供一种单目立体视觉测量系统位置姿态校准方法、装置、系统。校准方法包括:单目立体视觉测量系统包括一台相机,该相机运动至2个以上运动位置拍摄被测目标;2个以上运动位置包括:基准运动位置和相对运动位置;向被测目标投射3个以上亮点;该相机运动至2各个以上运动位置,分别拍摄带有3个以上亮点的被测目标图像,提取被测目标图像中的像点,分别将像点进行同名像点匹配;计算相机在各个运动位置拍摄的像点的归一化图像坐标;根据同名像点以及各个运动位置拍摄的像点的归一化图像坐标分别求解出相机

基于机器视觉的工件缺陷检测方法.pdf
本发明提供了一种基于机器视觉的工件缺陷检测方法。该方法首先采集法兰盘式工件的图像,对相机进行标定,获取标定误差,然后对工件轮廓进行亚像素边缘信息的提取,计算出拟合边缘到工件轮廓的距离,并通过比较该距离是否大于所给阈值判别工件外轮廓的破损情况,最后针对工件表面纹理复杂影响工件表面划痕与锈蚀分割的问题,采用基于像素分层采样的PixelNet卷积神经网络对表面缺陷进行分割。结果表明,本发明可以准确地检测出工件的外形缺陷和表面缺陷,并提高了算法鲁棒性。