
一种车辆追尾防护系统及防护控制方法.pdf

英瑞****写意

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆追尾防护系统及防护控制方法.pdf
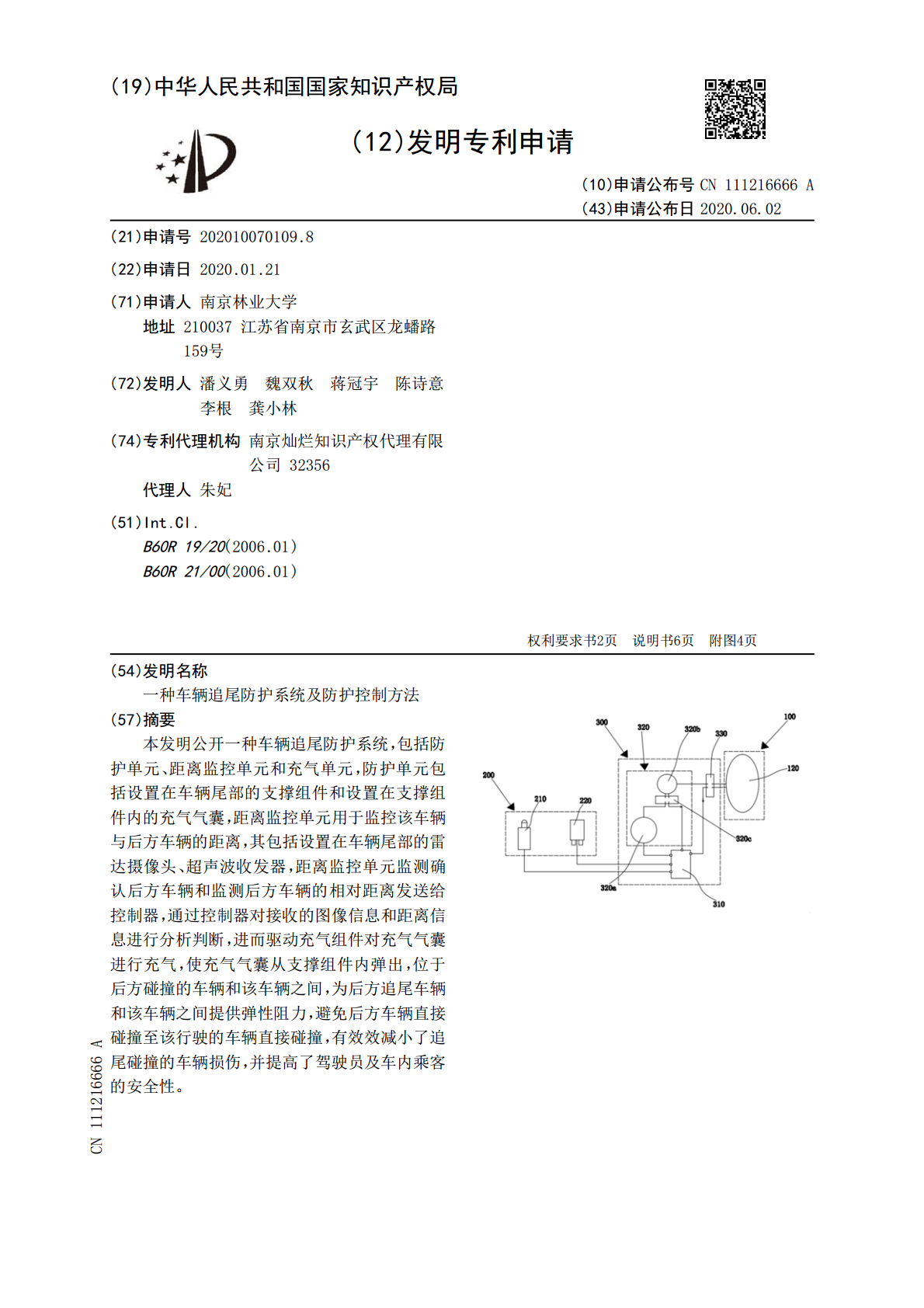
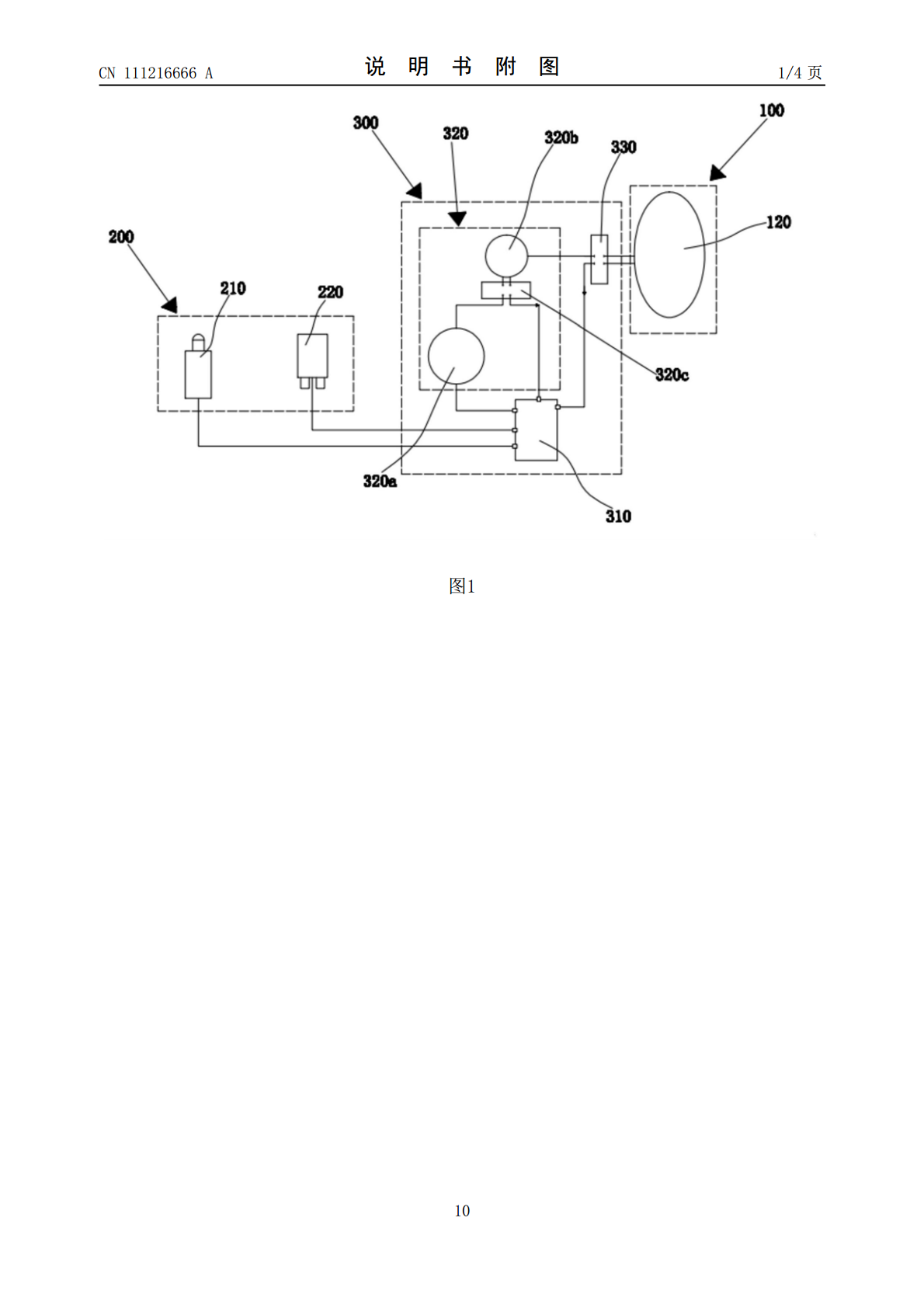
本发明公开一种车辆追尾防护系统,包括防护单元、距离监控单元和充气单元,防护单元包括设置在车辆尾部的支撑组件和设置在支撑组件内的充气气囊,距离监控单元用于监控该车辆与后方车辆的距离,其包括设置在车辆尾部的雷达摄像头、超声波收发器,距离监控单元监测确认后方车辆和监测后方车辆的相对距离发送给控制器,通过控制器对接收的图像信息和距离信息进行分析判断,进而驱动充气组件对充气气囊进行充气,使充气气囊从支撑组件内弹出,位于后方碰撞的车辆和该车辆之间,为后方追尾车辆和该车辆之间提供弹性阻力,避免后方车辆直接碰撞至该行驶的
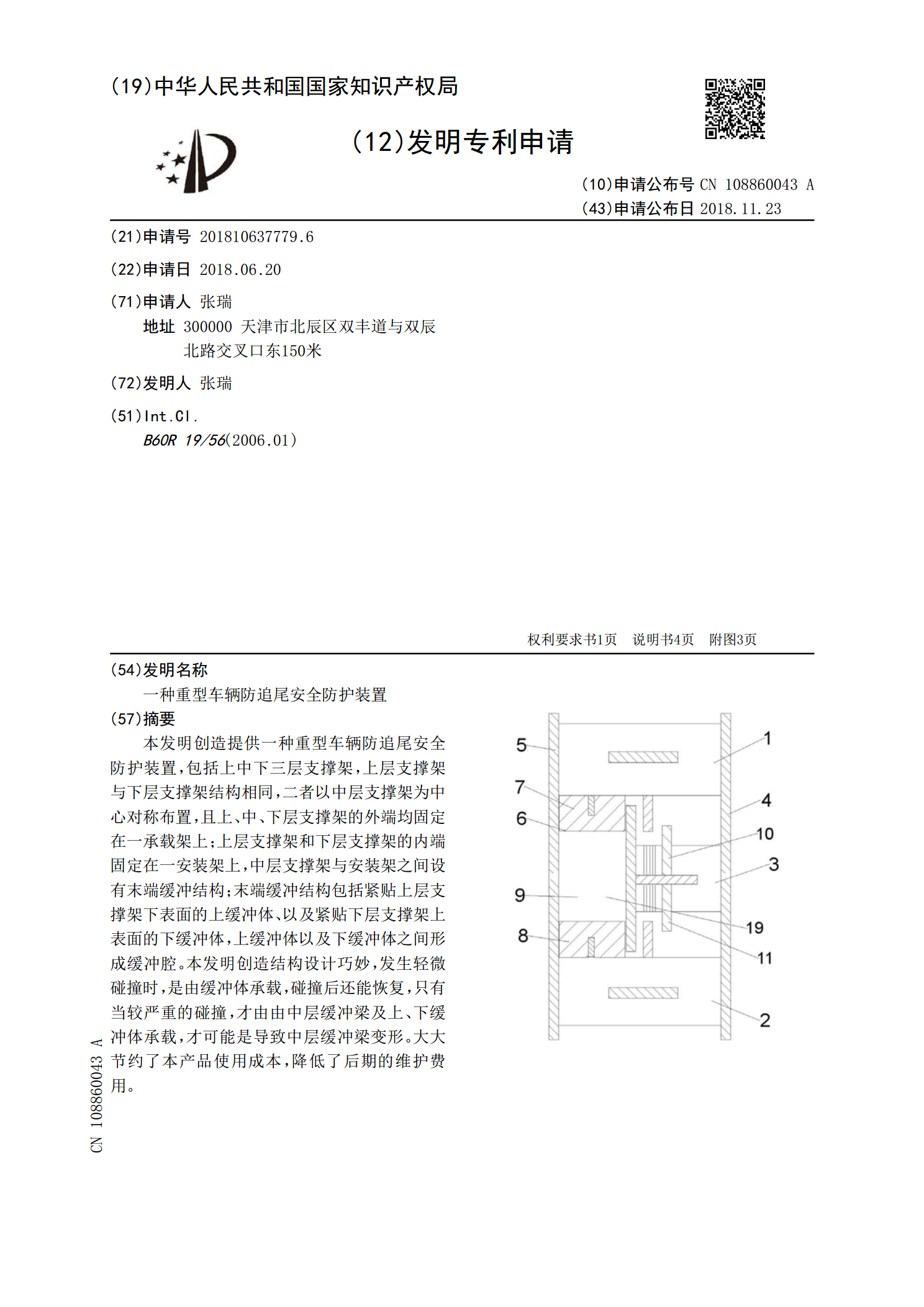
一种重型车辆防追尾安全防护装置.pdf
本发明创造提供一种重型车辆防追尾安全防护装置,包括上中下三层支撑架,上层支撑架与下层支撑架结构相同,二者以中层支撑架为中心对称布置,且上、中、下层支撑架的外端均固定在一承载架上;上层支撑架和下层支撑架的内端固定在一安装架上,中层支撑架与安装架之间设有末端缓冲结构;末端缓冲结构包括紧贴上层支撑架下表面的上缓冲体、以及紧贴下层支撑架上表面的下缓冲体,上缓冲体以及下缓冲体之间形成缓冲腔。本发明创造结构设计巧妙,发生轻微碰撞时,是由缓冲体承载,碰撞后还能恢复,只有当较严重的碰撞,才由由中层缓冲梁及上、下缓冲体承载

车辆安全防护系统及其方法.pdf
本发明有关于一种车辆安全防护系统及其方法,进行一车辆的主动式安全防护,车辆安全防护系统至少包括有数个影像撷取单元、一影像处理单元、一控制单元,以及一显示单元;藉此,本发明的车辆安全防护系统及其方法主要藉由环视摄影技术与可视距离检测技术进行车辆行进间或熄火后的周围物件侦测与距离检测,以主动发出警示提醒驾驶留意车况,并结合开门警示技术于车辆静止时辨识后方物件的种类而限制车门的启闭,以避免碰撞事故发生,有效以车辆周围的主动式侦测技术,达到维护行车安全与保障生命财产安全的优势。
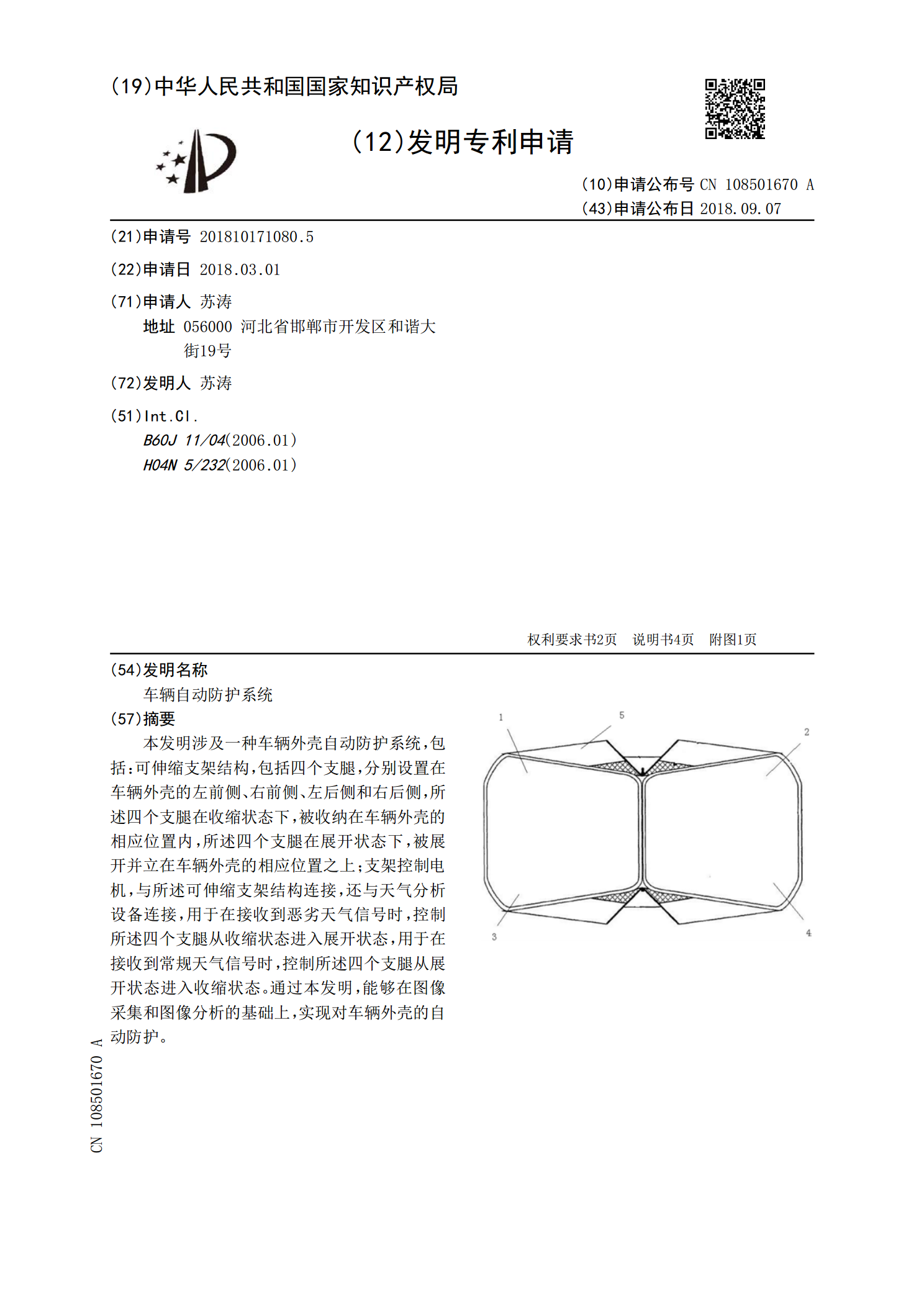
车辆自动防护系统.pdf
本发明涉及一种车辆外壳自动防护系统,包括:可伸缩支架结构,包括四个支腿,分别设置在车辆外壳的左前侧、右前侧、左后侧和右后侧,所述四个支腿在收缩状态下,被收纳在车辆外壳的相应位置内,所述四个支腿在展开状态下,被展开并立在车辆外壳的相应位置之上;支架控制电机,与所述可伸缩支架结构连接,还与天气分析设备连接,用于在接收到恶劣天气信号时,控制所述四个支腿从收缩状态进入展开状态,用于在接收到常规天气信号时,控制所述四个支腿从展开状态进入收缩状态。通过本发明,能够在图像采集和图像分析的基础上,实现对车辆外壳的自动防护
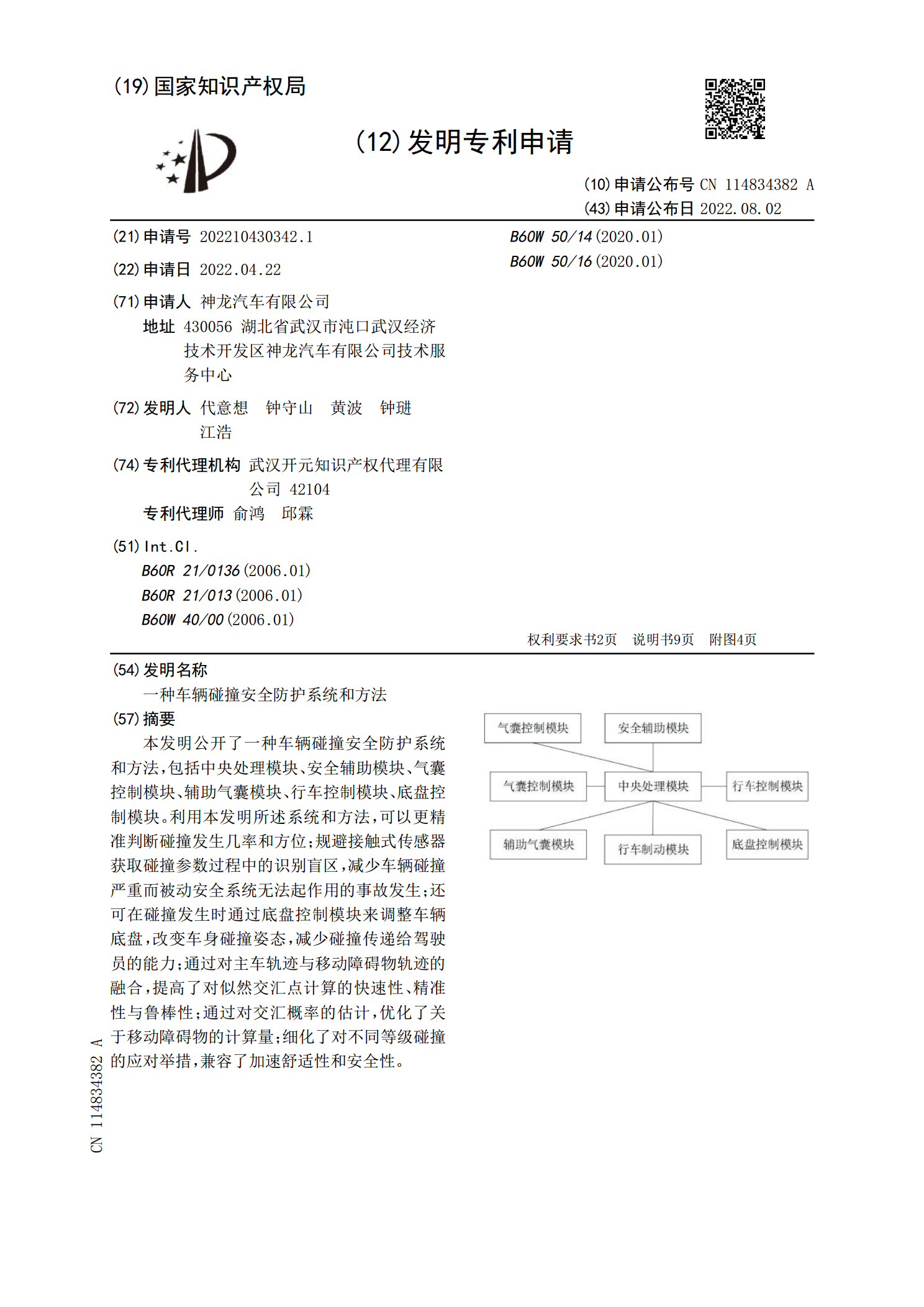
一种车辆碰撞安全防护系统和方法.pdf
本发明公开了一种车辆碰撞安全防护系统和方法,包括中央处理模块、安全辅助模块、气囊控制模块、辅助气囊模块、行车控制模块、底盘控制模块。利用本发明所述系统和方法,可以更精准判断碰撞发生几率和方位;规避接触式传感器获取碰撞参数过程中的识别盲区,减少车辆碰撞严重而被动安全系统无法起作用的事故发生;还可在碰撞发生时通过底盘控制模块来调整车辆底盘,改变车身碰撞姿态,减少碰撞传递给驾驶员的能力;通过对主车轨迹与移动障碍物轨迹的融合,提高了对似然交汇点计算的快速性、精准性与鲁棒性;通过对交汇概率的估计,优化了关于移动障碍