
自动行驶控制系统、自动行驶路径生成系统、联合收割机.pdf

是浩****32

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共71页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动行驶控制系统、自动行驶路径生成系统、联合收割机.pdf
本发明提供自动行驶控制系统、自动行驶路径生成系统、联合收割机。其中的一种自动行驶控制系统控制对未作业地的作物进行收获的联合收割机的自动行驶,具备:预计总产量取得部,其取得通过收获未作业地的作物而预计可得的谷粒的预计总产量;行驶路径生成部,其生成未作业地中的联合收割机的行驶路径。行驶路径生成部在由预计总产量取得部取得的预计总产量超过特定量的情况下,设定部分作业区域,并在部分作业区域的内部生成联合收割机的行驶路径,部分作业区域为未作业地的一部分区域。部分作业区域被设定为,通过收获该部分作业区域的作物而预计可得
自动行驶控制系统、自动行驶控制方法、自动行驶控制程序以及存储介质.pdf
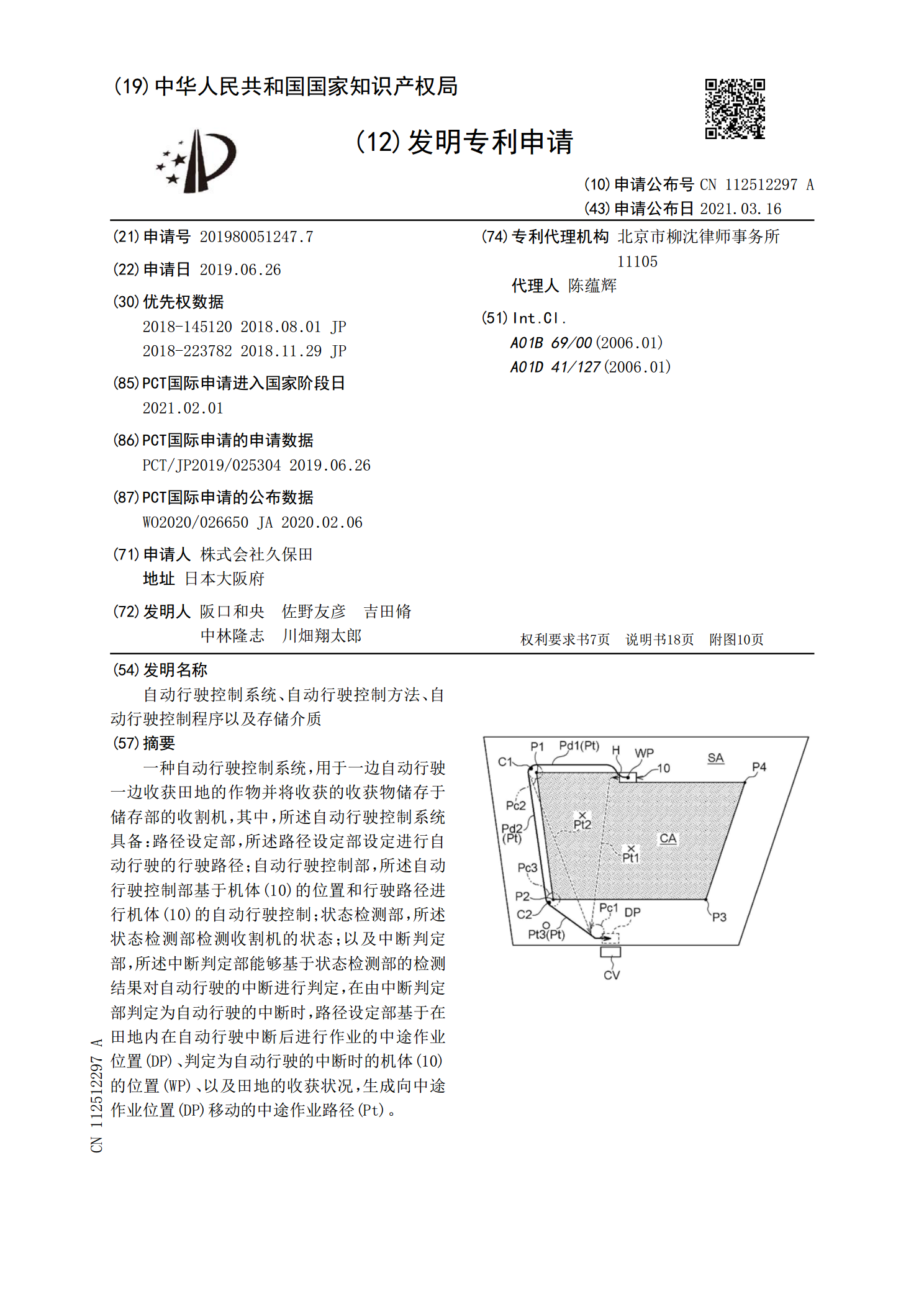
一种自动行驶控制系统,用于一边自动行驶一边收获田地的作物并将收获的收获物储存于储存部的收割机,其中,所述自动行驶控制系统具备:路径设定部,所述路径设定部设定进行自动行驶的行驶路径;自动行驶控制部,所述自动行驶控制部基于机体(10)的位置和行驶路径进行机体(10)的自动行驶控制;状态检测部,所述状态检测部检测收割机的状态;以及中断判定部,所述中断判定部能够基于状态检测部的检测结果对自动行驶的中断进行判定,在由中断判定部判定为自动行驶的中断时,路径设定部基于在田地内在自动行驶中断后进行作业的中途作业位置(DP
自动行驶车以及自动行驶系统.pdf
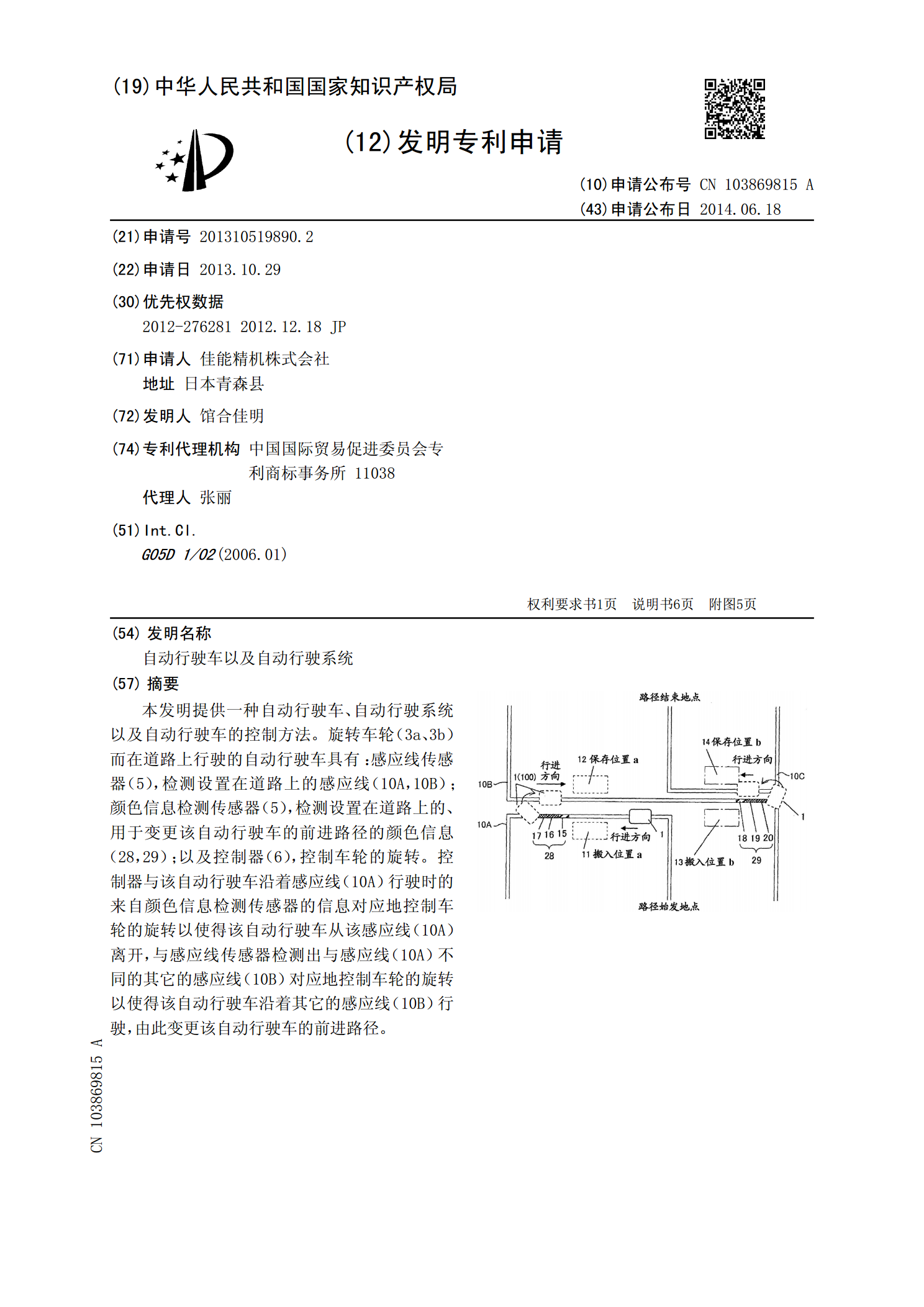
本发明提供一种自动行驶车、自动行驶系统以及自动行驶车的控制方法。旋转车轮(3a、3b)而在道路上行驶的自动行驶车具有:感应线传感器(5),检测设置在道路上的感应线(10A,10B);颜色信息检测传感器(5),检测设置在道路上的、用于变更该自动行驶车的前进路径的颜色信息(28,29);以及控制器(6),控制车轮的旋转。控制器与该自动行驶车沿着感应线(10A)行驶时的来自颜色信息检测传感器的信息对应地控制车轮的旋转以使得该自动行驶车从该感应线(10A)离开,与感应线传感器检测出与感应线(10A)不同的其它的感

自动行驶控制系统、联合收割机、收获机.pdf
提供自动行驶控制系统、联合收割机、收获机。其中的一种自动行驶控制系统是在己收割区域中进行转弯行驶的联合收割机所用的自动行驶控制系统,具备:往复行驶路径设定部,其能够在未收割区域设定相互平行的多个往复行驶路径;转弯路径设定部,其能够在己收割区域设定联合收割机收割完往复行驶路径之后向接下来的往复行驶路径的端部驶入的转弯路径。转弯路径包含使联合收割机进行前进转弯行驶的路径和使联合收割机进行后退转弯行驶的路径。转弯路径设定部能够以如下方式设定转弯路径:使联合收割机在向左右一方进行前进转弯行驶之后,向左右另一方进行
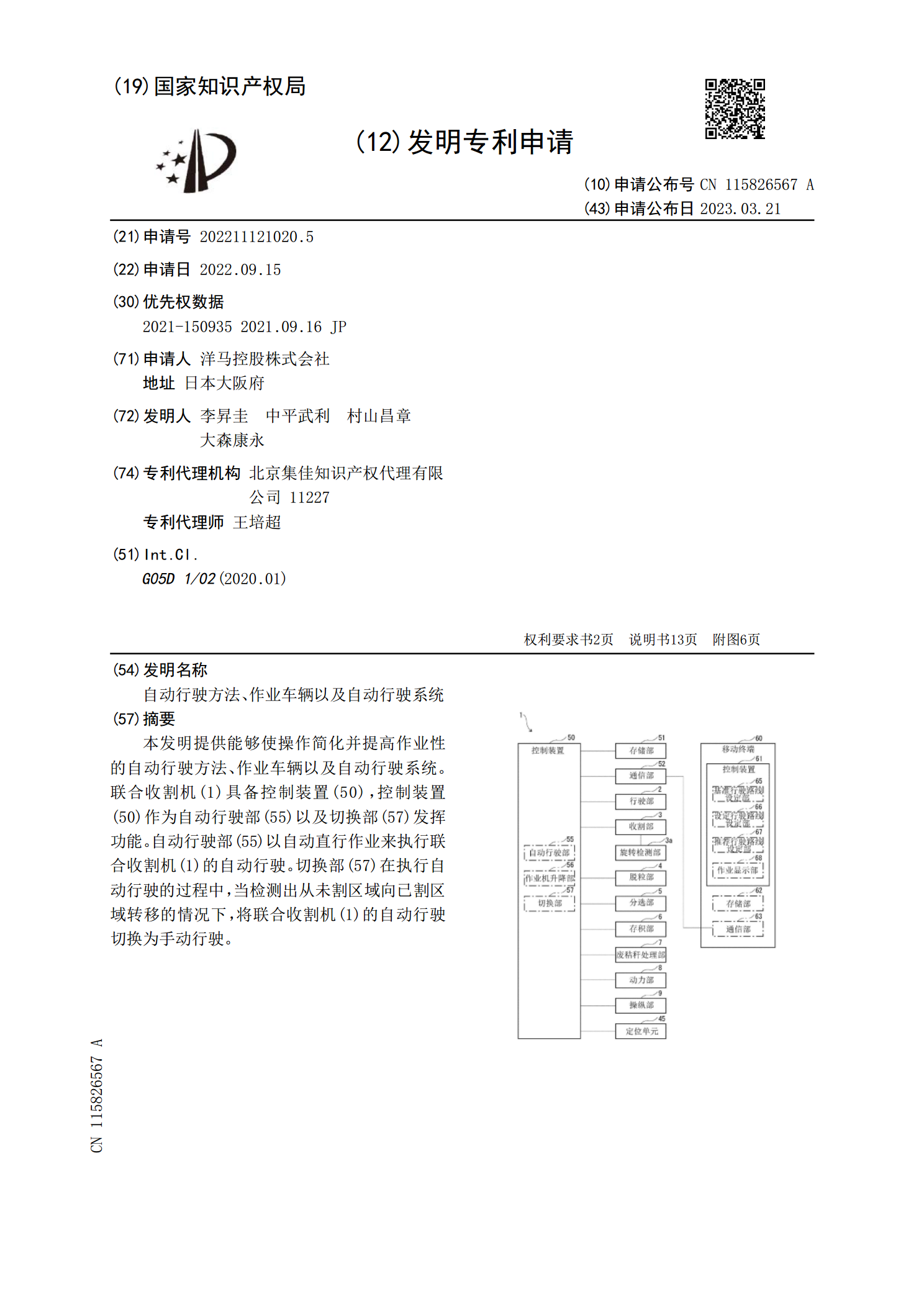
自动行驶方法、作业车辆以及自动行驶系统.pdf
本发明提供能够使操作简化并提高作业性的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)具备控制装置(50),控制装置(50)作为自动行驶部(55)以及切换部(57)发挥功能。自动行驶部(55)以自动直行作业来执行联合收割机(1)的自动行驶。切换部(57)在执行自动行驶的过程中,当检测出从未割区域向已割区域转移的情况下,将联合收割机(1)的自动行驶切换为手动行驶。