
用于确定无人驾驶车辆的速度和位姿的方法和装置.pdf

兴朝****45


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于确定无人驾驶车辆的速度和位姿的方法和装置.pdf
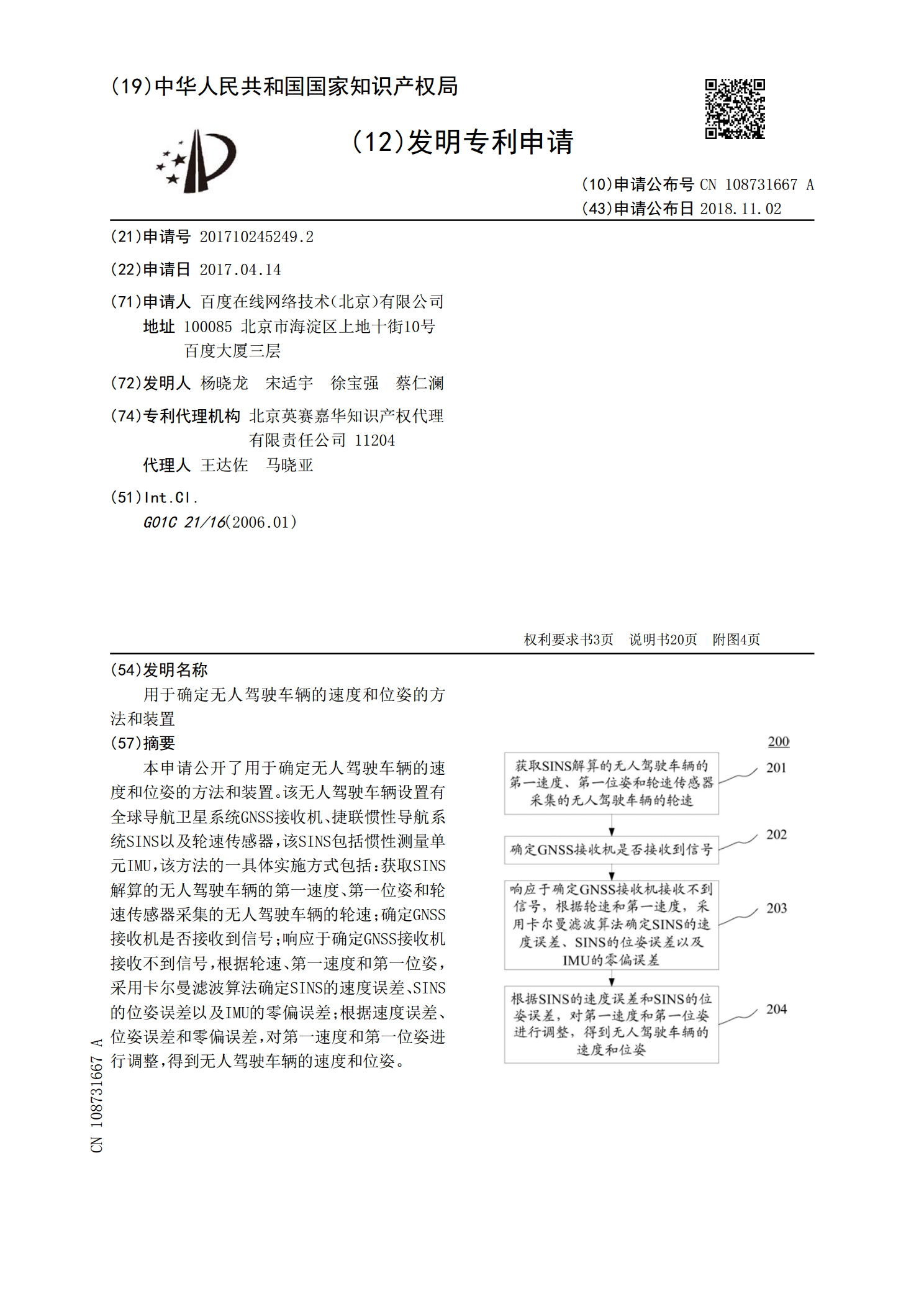
本申请公开了用于确定无人驾驶车辆的速度和位姿的方法和装置。该无人驾驶车辆设置有全球导航卫星系统GNSS接收机、捷联惯性导航系统SINS以及轮速传感器,该SINS包括惯性测量单元IMU,该方法的一具体实施方式包括:获取SINS解算的无人驾驶车辆的第一速度、第一位姿和轮速传感器采集的无人驾驶车辆的轮速;确定GNSS接收机是否接收到信号;响应于确定GNSS接收机接收不到信号,根据轮速、第一速度和第一位姿,采用卡尔曼滤波算法确定SINS的速度误差、SINS的位姿误差以及IMU的零偏误差;根据速度误差、位姿误差和零
车辆位姿确定方法及装置.pdf
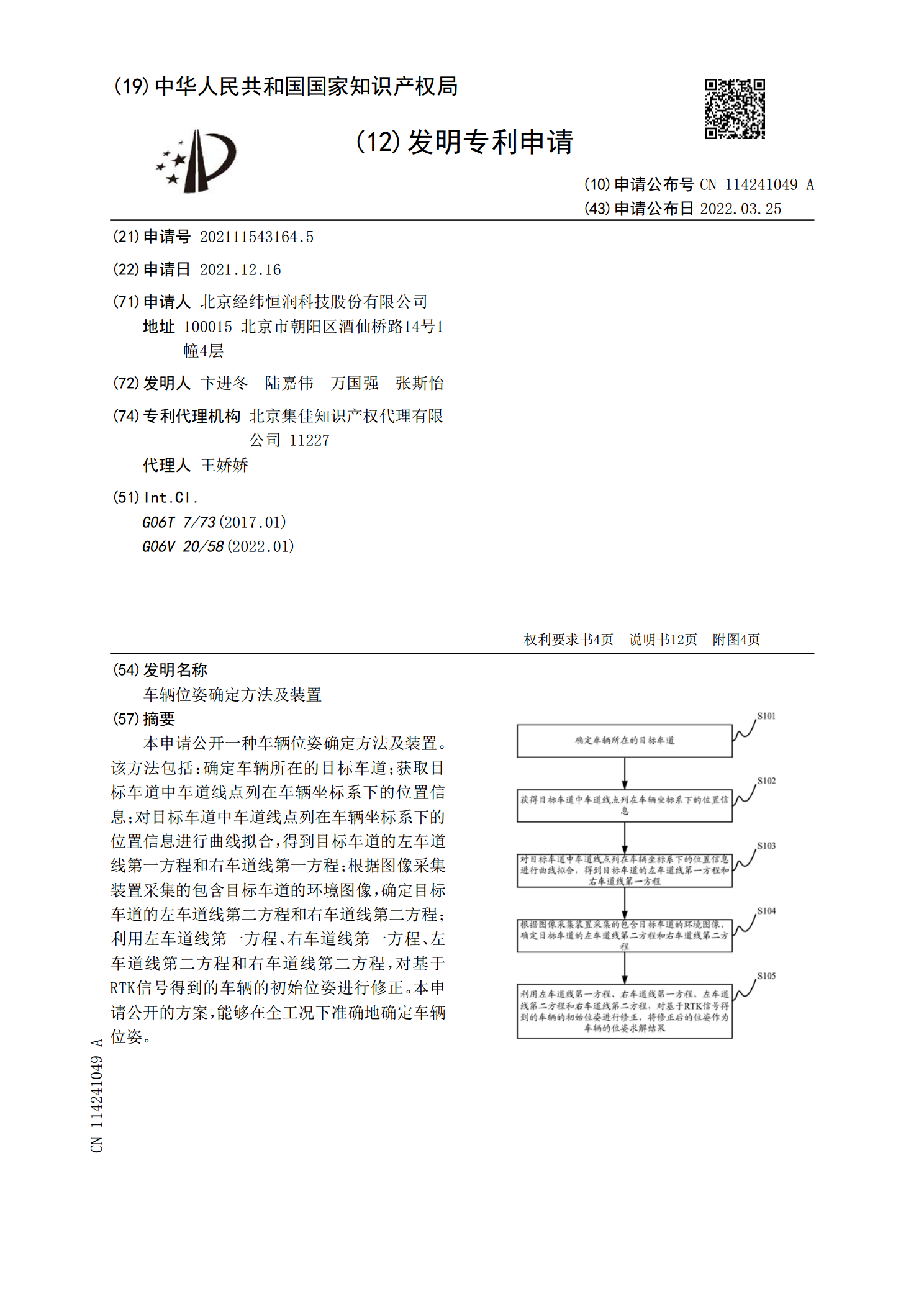
本申请公开一种车辆位姿确定方法及装置。该方法包括:确定车辆所在的目标车道;获取目标车道中车道线点列在车辆坐标系下的位置信息;对目标车道中车道线点列在车辆坐标系下的位置信息进行曲线拟合,得到目标车道的左车道线第一方程和右车道线第一方程;根据图像采集装置采集的包含目标车道的环境图像,确定目标车道的左车道线第二方程和右车道线第二方程;利用左车道线第一方程、右车道线第一方程、左车道线第二方程和右车道线第二方程,对基于RTK信号得到的车辆的初始位姿进行修正。本申请公开的方案,能够在全工况下准确地确定车辆位姿。

位姿变化量的确定方法、装置、系统和车辆.pdf
本公开涉及一种位姿变化量的确定方法、装置、系统和车辆,应用于车辆,该方法包括:根据该车辆的车身的不同部位设置的每个摄像头在相邻的两个时刻采集到的两个图像帧确定上述每个摄像头对应的第一位姿变化量;根据每个脉冲编码器在上述两个时刻的脉冲读数差和该车辆的车轮参数确定上述每个车轮对应的第二位姿变化量;根据上述多个第二位姿变化量对上述多个第一位姿变化量进行筛选,以根据筛选出的第三位姿变化量确定该车辆在上述两个时刻之间的实际位姿变化量。能够根据车辆脉冲读数计算出的位姿变化量对根据摄像头检测出的位姿变化量进行校验和筛选
位姿确定方法和装置、设备、介质.pdf
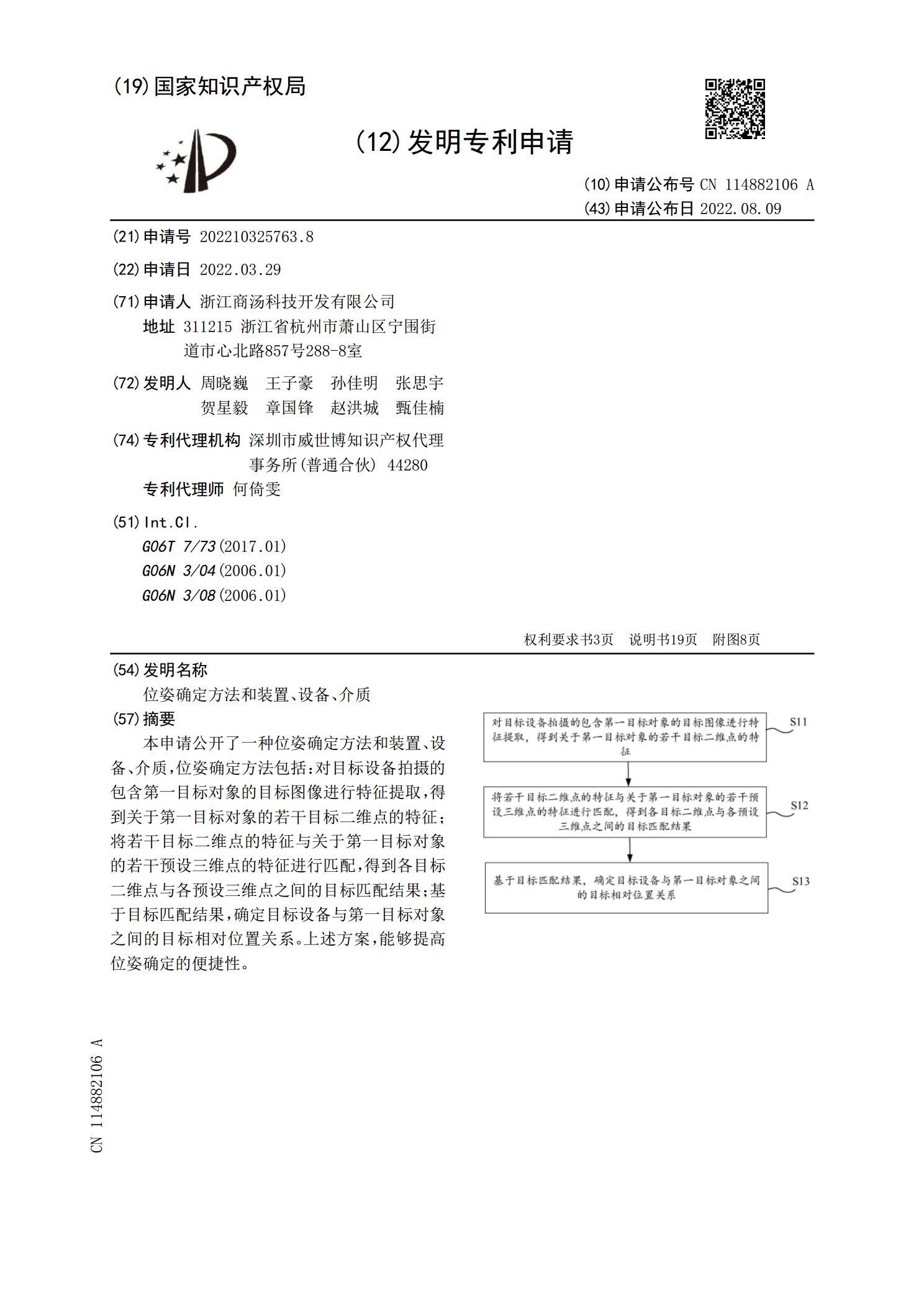
本申请公开了一种位姿确定方法和装置、设备、介质,位姿确定方法包括:对目标设备拍摄的包含第一目标对象的目标图像进行特征提取,得到关于第一目标对象的若干目标二维点的特征;将若干目标二维点的特征与关于第一目标对象的若干预设三维点的特征进行匹配,得到各目标二维点与各预设三维点之间的目标匹配结果;基于目标匹配结果,确定目标设备与第一目标对象之间的目标相对位置关系。上述方案,能够提高位姿确定的便捷性。
确定用于被动进入和车辆启动的装置位置的系统和方法.pdf
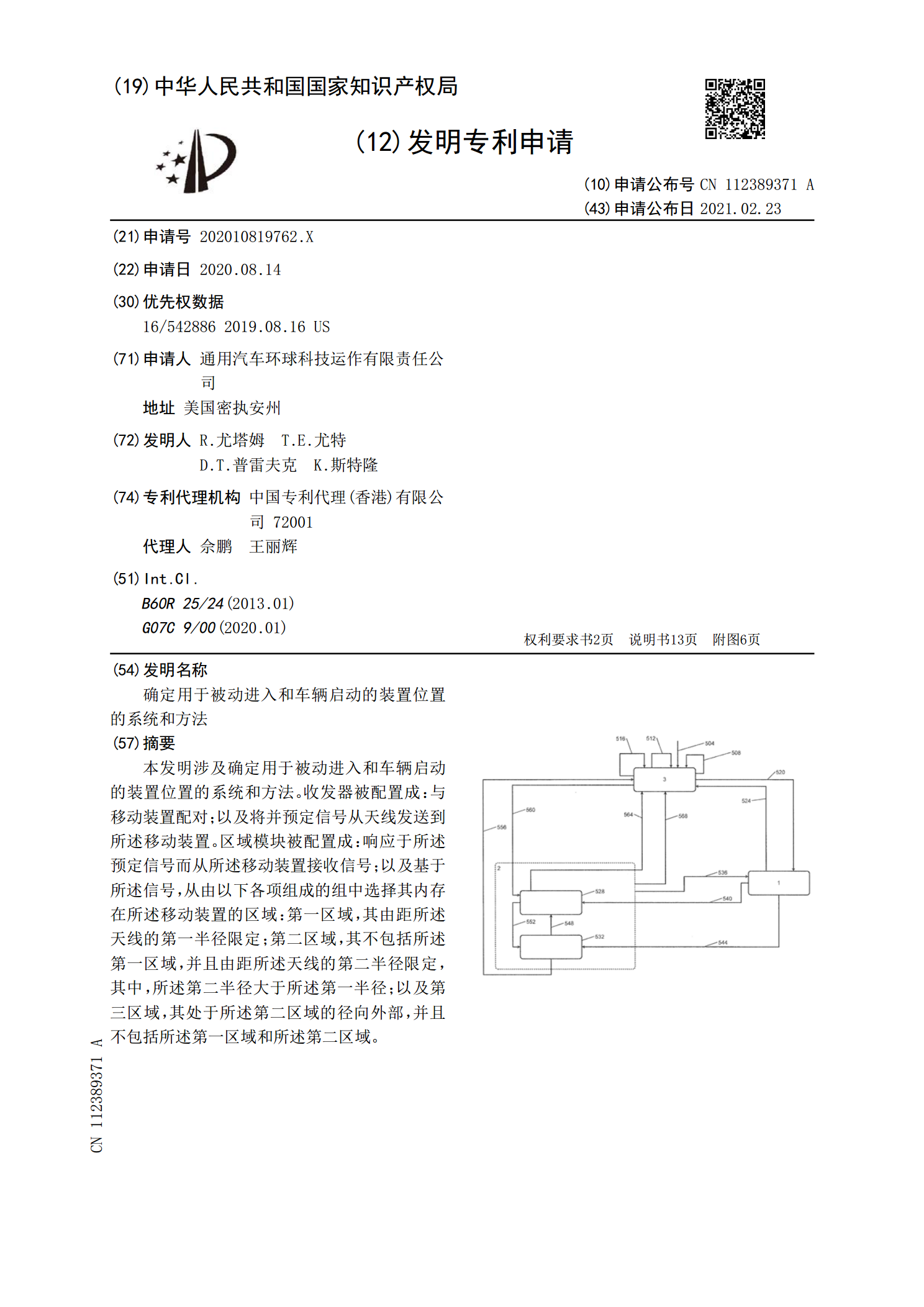
本发明涉及确定用于被动进入和车辆启动的装置位置的系统和方法。收发器被配置成:与移动装置配对;以及将并预定信号从天线发送到所述移动装置。区域模块被配置成:响应于所述预定信号而从所述移动装置接收信号;以及基于所述信号,从由以下各项组成的组中选择其内存在所述移动装置的区域:第一区域,其由距所述天线的第一半径限定;第二区域,其不包括所述第一区域,并且由距所述天线的第二半径限定,其中,所述第二半径大于所述第一半径;以及第三区域,其处于所述第二区域的径向外部,并且不包括所述第一区域和所述第二区域。