
一种工业机器人视觉定位辅助器.pdf

秋花****姐姐


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种工业机器人视觉定位辅助器.pdf
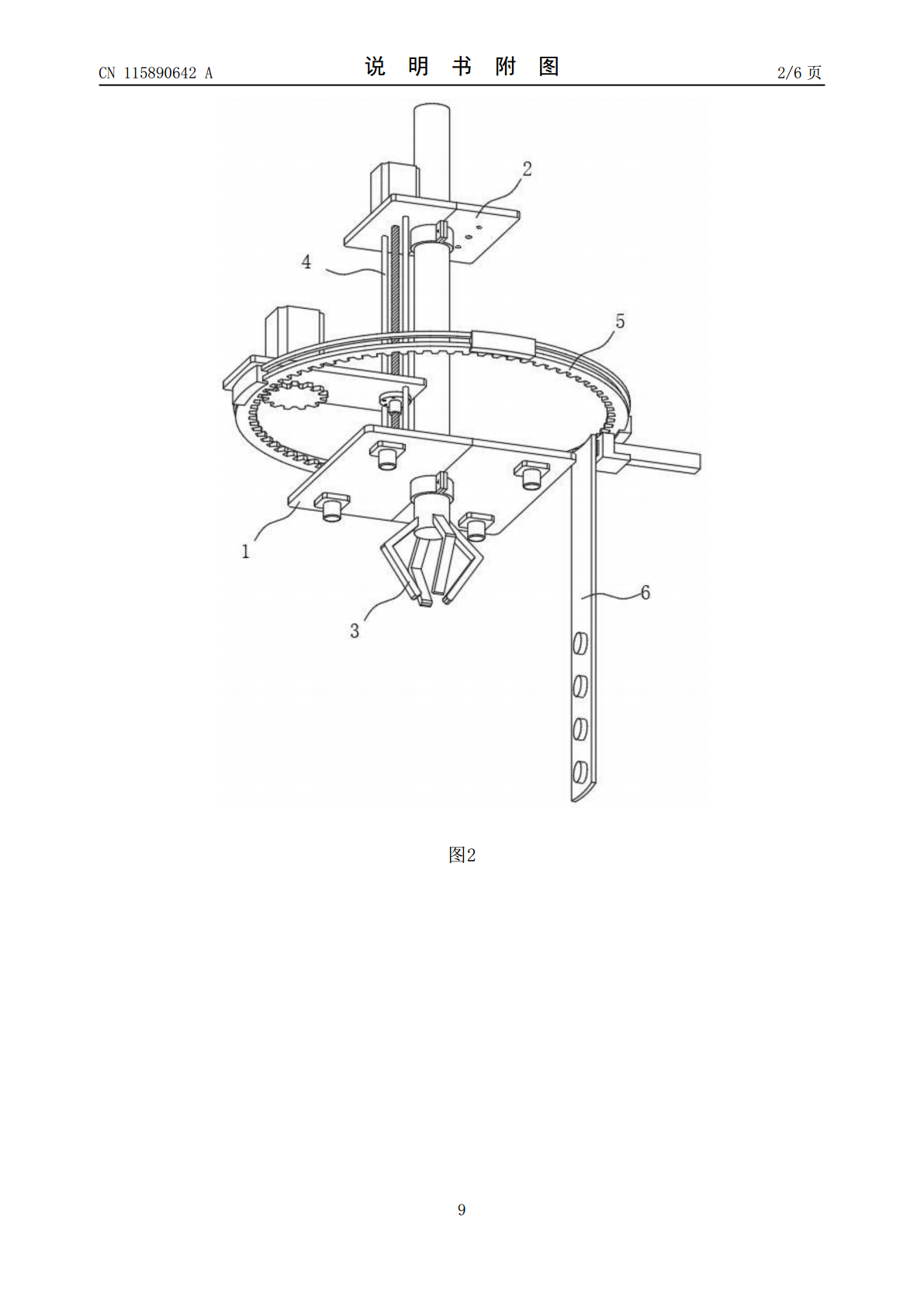
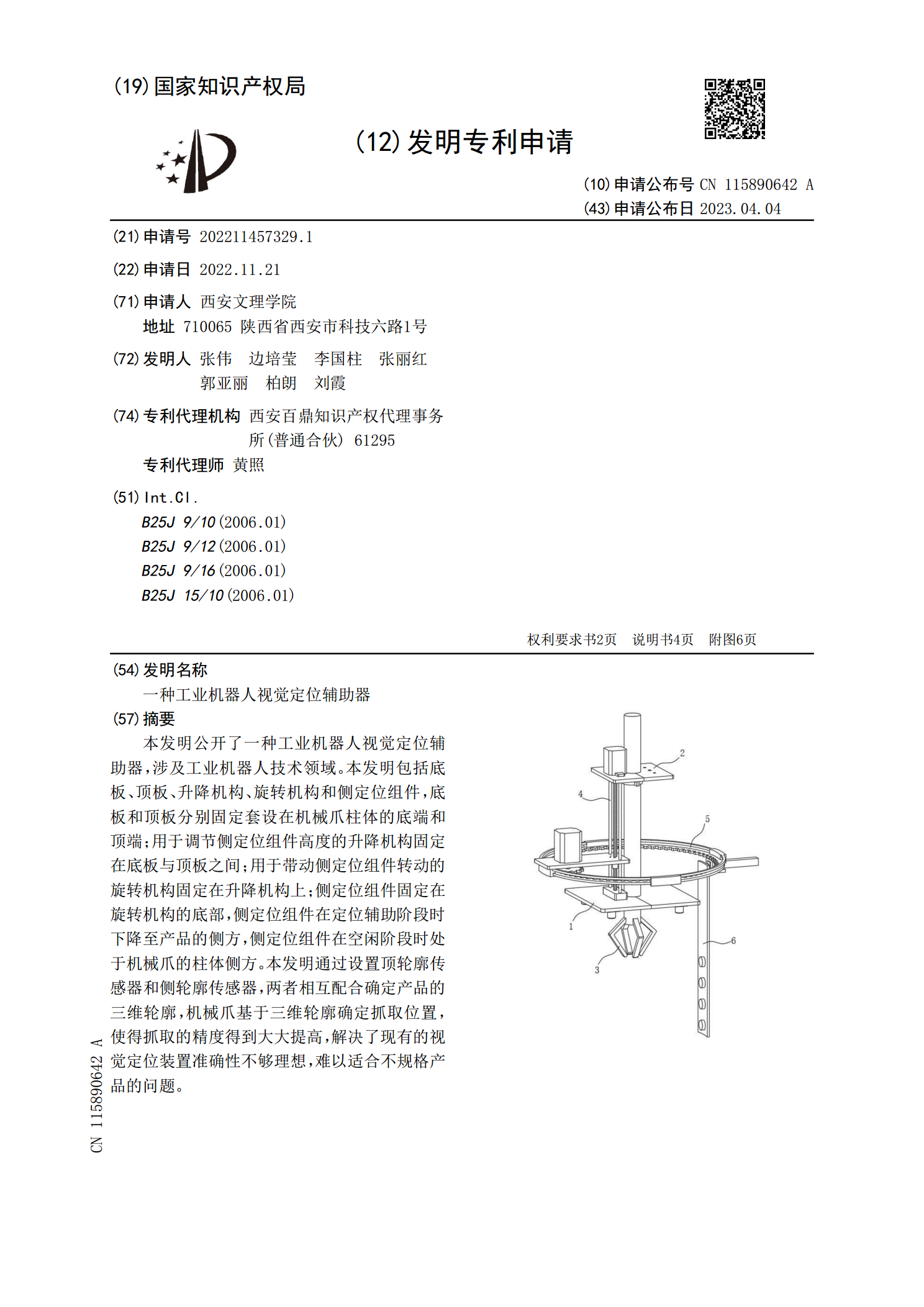
本发明公开了一种工业机器人视觉定位辅助器,涉及工业机器人技术领域。本发明包括底板、顶板、升降机构、旋转机构和侧定位组件,底板和顶板分别固定套设在机械爪柱体的底端和顶端;用于调节侧定位组件高度的升降机构固定在底板与顶板之间;用于带动侧定位组件转动的旋转机构固定在升降机构上;侧定位组件固定在旋转机构的底部,侧定位组件在定位辅助阶段时下降至产品的侧方,侧定位组件在空闲阶段时处于机械爪的柱体侧方。本发明通过设置顶轮廓传感器和侧轮廓传感器,两者相互配合确定产品的三维轮廓,机械爪基于三维轮廓确定抓取位置,使得抓取的精
工业机器人视觉定位辅助机构.pdf
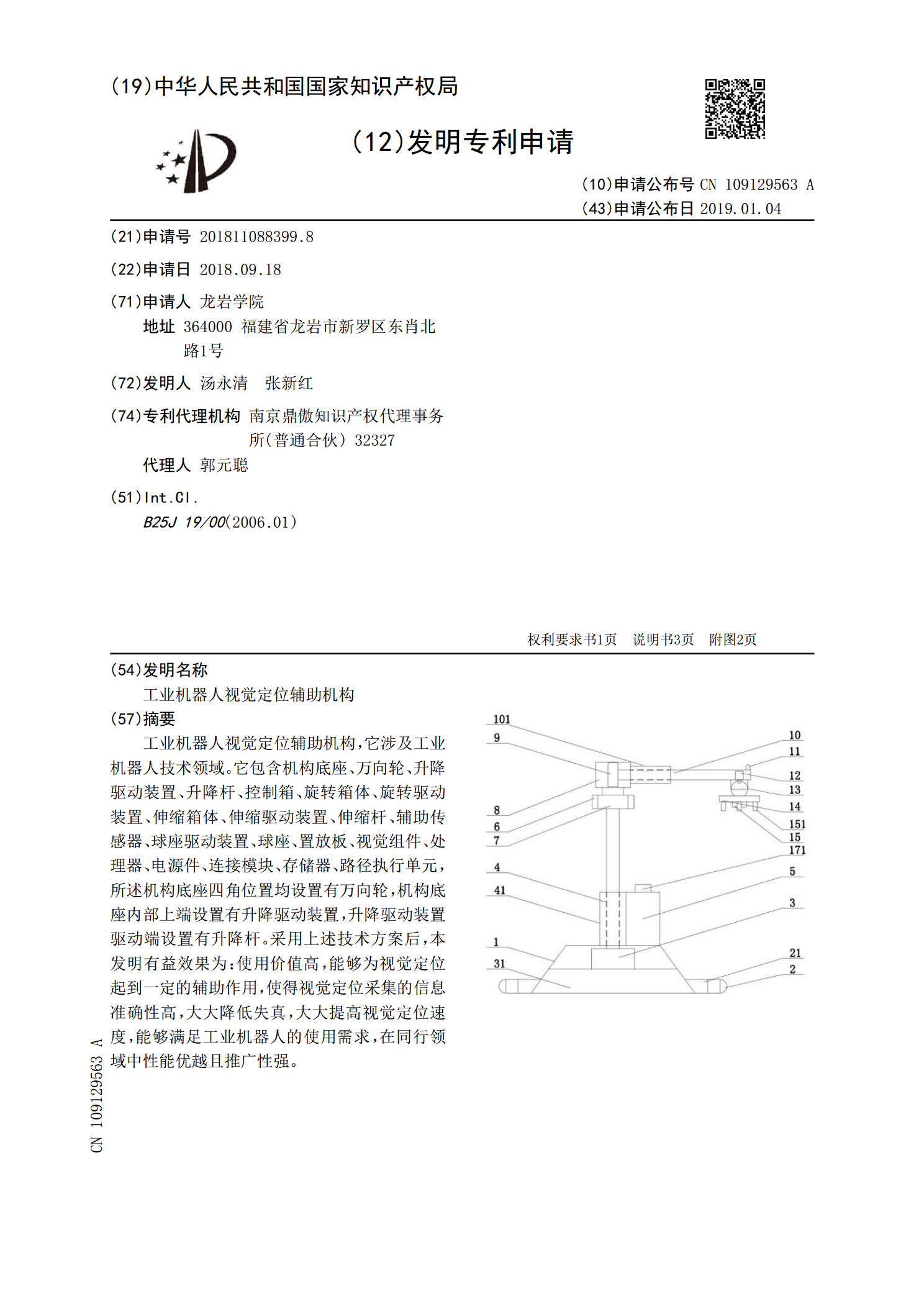
工业机器人视觉定位辅助机构,它涉及工业机器人技术领域。它包含机构底座、万向轮、升降驱动装置、升降杆、控制箱、旋转箱体、旋转驱动装置、伸缩箱体、伸缩驱动装置、伸缩杆、辅助传感器、球座驱动装置、球座、置放板、视觉组件、处理器、电源件、连接模块、存储器、路径执行单元,所述机构底座四角位置均设置有万向轮,机构底座内部上端设置有升降驱动装置,升降驱动装置驱动端设置有升降杆。采用上述技术方案后,本发明有益效果为:使用价值高,能够为视觉定位起到一定的辅助作用,使得视觉定位采集的信息准确性高,大大降低失真,大大提高视觉定
一种工业机器人生产用定位辅助设备.pdf
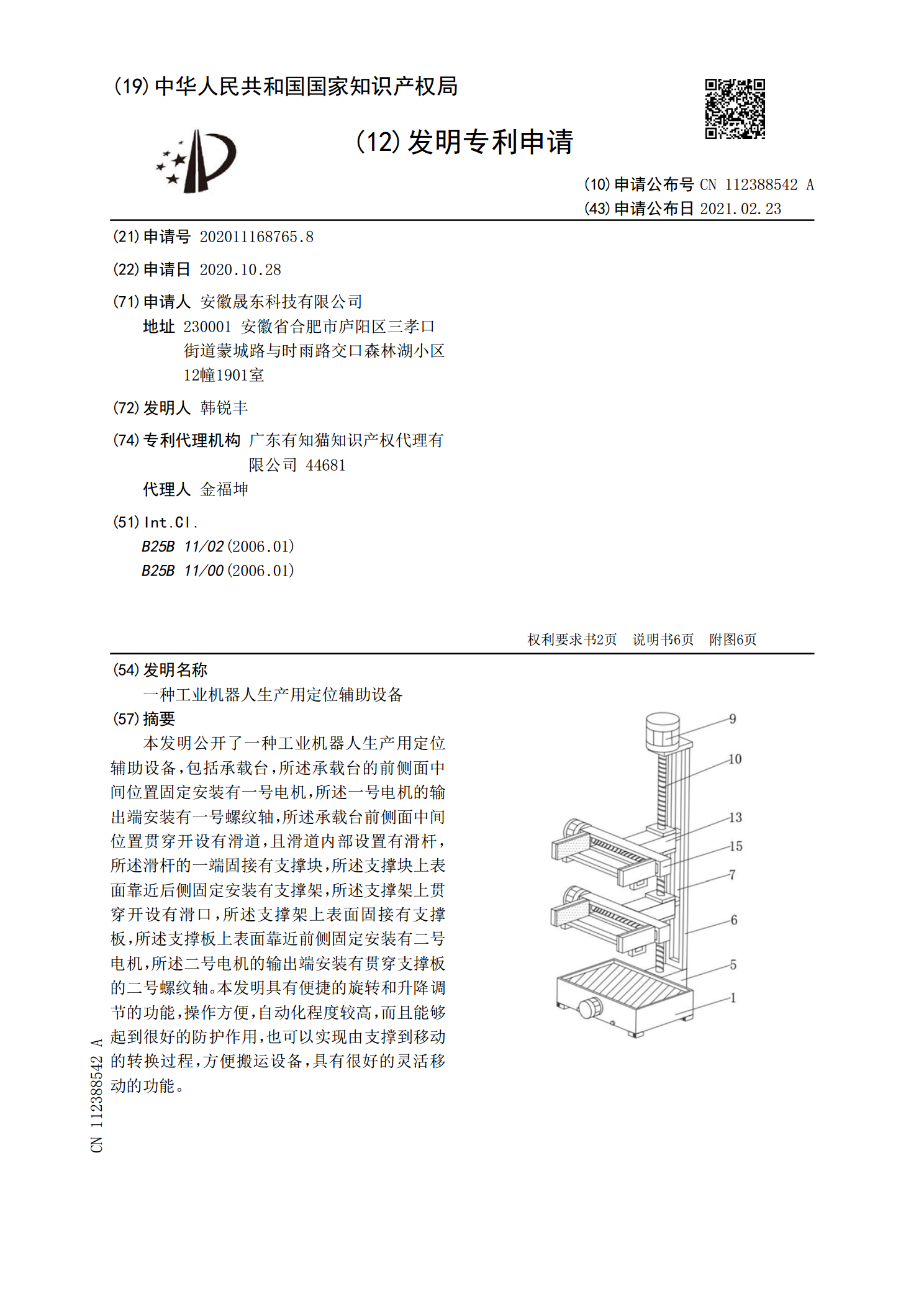
本发明公开了一种工业机器人生产用定位辅助设备,包括承载台,所述承载台的前侧面中间位置固定安装有一号电机,所述一号电机的输出端安装有一号螺纹轴,所述承载台前侧面中间位置贯穿开设有滑道,且滑道内部设置有滑杆,所述滑杆的一端固接有支撑块,所述支撑块上表面靠近后侧固定安装有支撑架,所述支撑架上贯穿开设有滑口,所述支撑架上表面固接有支撑板,所述支撑板上表面靠近前侧固定安装有二号电机,所述二号电机的输出端安装有贯穿支撑板的二号螺纹轴。本发明具有便捷的旋转和升降调节的功能,操作方便,自动化程度较高,而且能够起到很好的防
一种PCB板的机器人辅助视觉定位装配系统.pdf
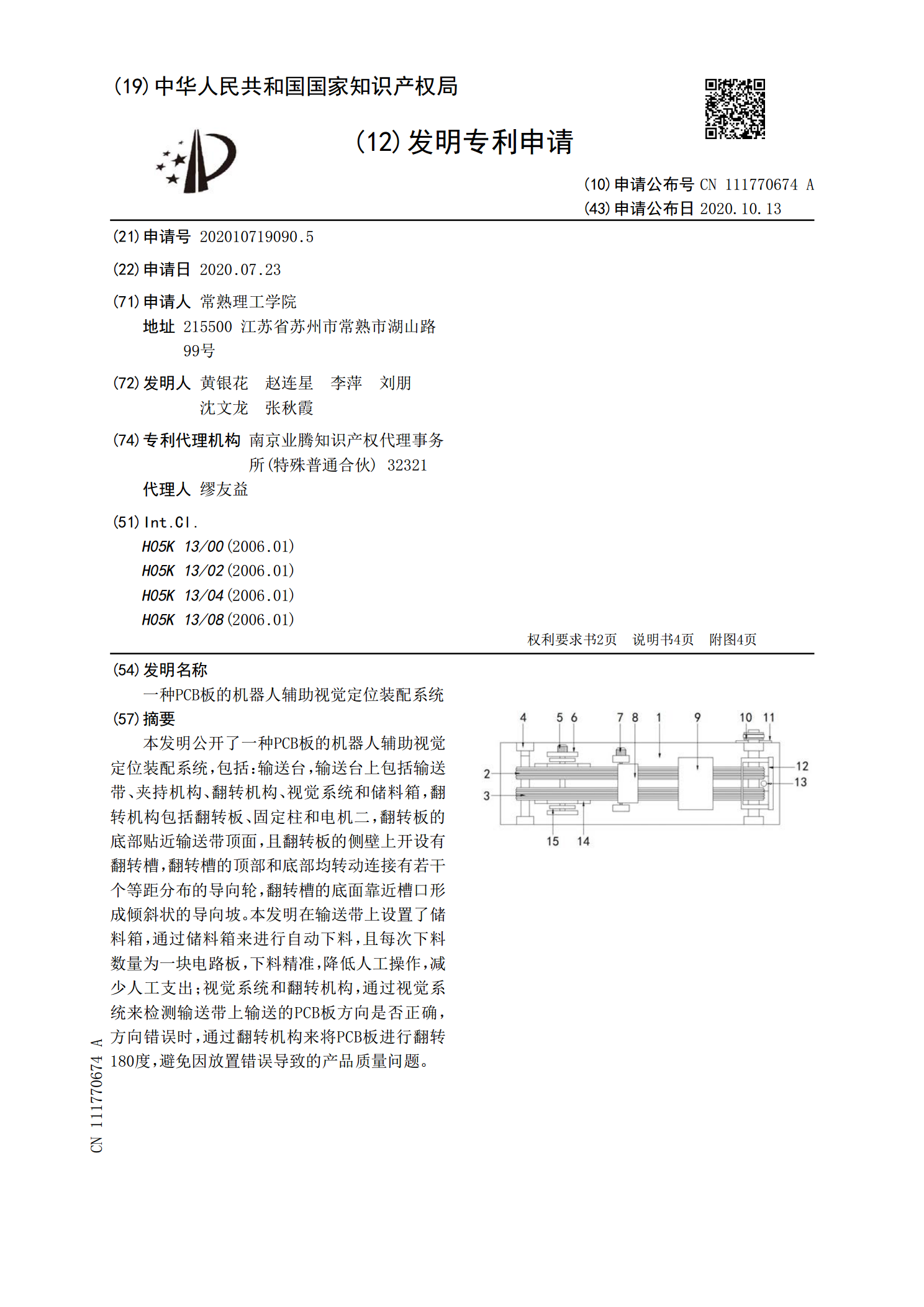
本发明公开了一种PCB板的机器人辅助视觉定位装配系统,包括:输送台,输送台上包括输送带、夹持机构、翻转机构、视觉系统和储料箱,翻转机构包括翻转板、固定柱和电机二,翻转板的底部贴近输送带顶面,且翻转板的侧壁上开设有翻转槽,翻转槽的顶部和底部均转动连接有若干个等距分布的导向轮,翻转槽的底面靠近槽口形成倾斜状的导向坡。本发明在输送带上设置了储料箱,通过储料箱来进行自动下料,且每次下料数量为一块电路板,下料精准,降低人工操作,减少人工支出;视觉系统和翻转机构,通过视觉系统来检测输送带上输送的PCB板方向是否正确,

工业机器人视觉定位系统研究.docx
工业机器人视觉定位系统研究工业机器人视觉定位系统研究摘要:随着工业自动化程度的不断提高,工业机器人在生产线上的应用越来越广泛。而对于工业机器人的定位和导航来说,视觉定位系统起着至关重要的作用。本论文通过对工业机器人视觉定位系统的研究,探索了相关的技术和方法,并对其应用进行了讨论。关键词:工业机器人;视觉定位;研究;应用引言:工业机器人在现代生产中扮演着重要的角色,既能提高生产效率,又能减少人工劳动。然而,由于现实环境的复杂性和机器人自身的限制,工业机器人的定位和导航问题仍然具有挑战性。视觉定位系统作为一种