
工业机器人视觉定位系统研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人视觉定位系统研究.docx
工业机器人视觉定位系统研究工业机器人视觉定位系统研究摘要:随着工业自动化程度的不断提高,工业机器人在生产线上的应用越来越广泛。而对于工业机器人的定位和导航来说,视觉定位系统起着至关重要的作用。本论文通过对工业机器人视觉定位系统的研究,探索了相关的技术和方法,并对其应用进行了讨论。关键词:工业机器人;视觉定位;研究;应用引言:工业机器人在现代生产中扮演着重要的角色,既能提高生产效率,又能减少人工劳动。然而,由于现实环境的复杂性和机器人自身的限制,工业机器人的定位和导航问题仍然具有挑战性。视觉定位系统作为一种

基于机器视觉的工业机器人定位系统研究与应用.pptx
添加副标题目录PART01PART02机器视觉技术的定义和原理机器视觉技术的应用领域机器视觉技术的发展趋势PART03工业机器人定位系统的定义和作用工业机器人定位系统的组成和原理工业机器人定位系统的应用场景和优势PART04机器视觉技术在工业机器人定位系统中的应用方式基于机器视觉的工业机器人定位系统关键技术基于机器视觉的工业机器人定位系统算法研究PART05基于机器视觉的工业机器人定位系统在制造业中的应用基于机器视觉的工业机器人定位系统在物流业中的应用基于机器视觉的工业机器人定位系统在医疗行业中的应用基于
工业机器人视觉定位辅助机构.pdf
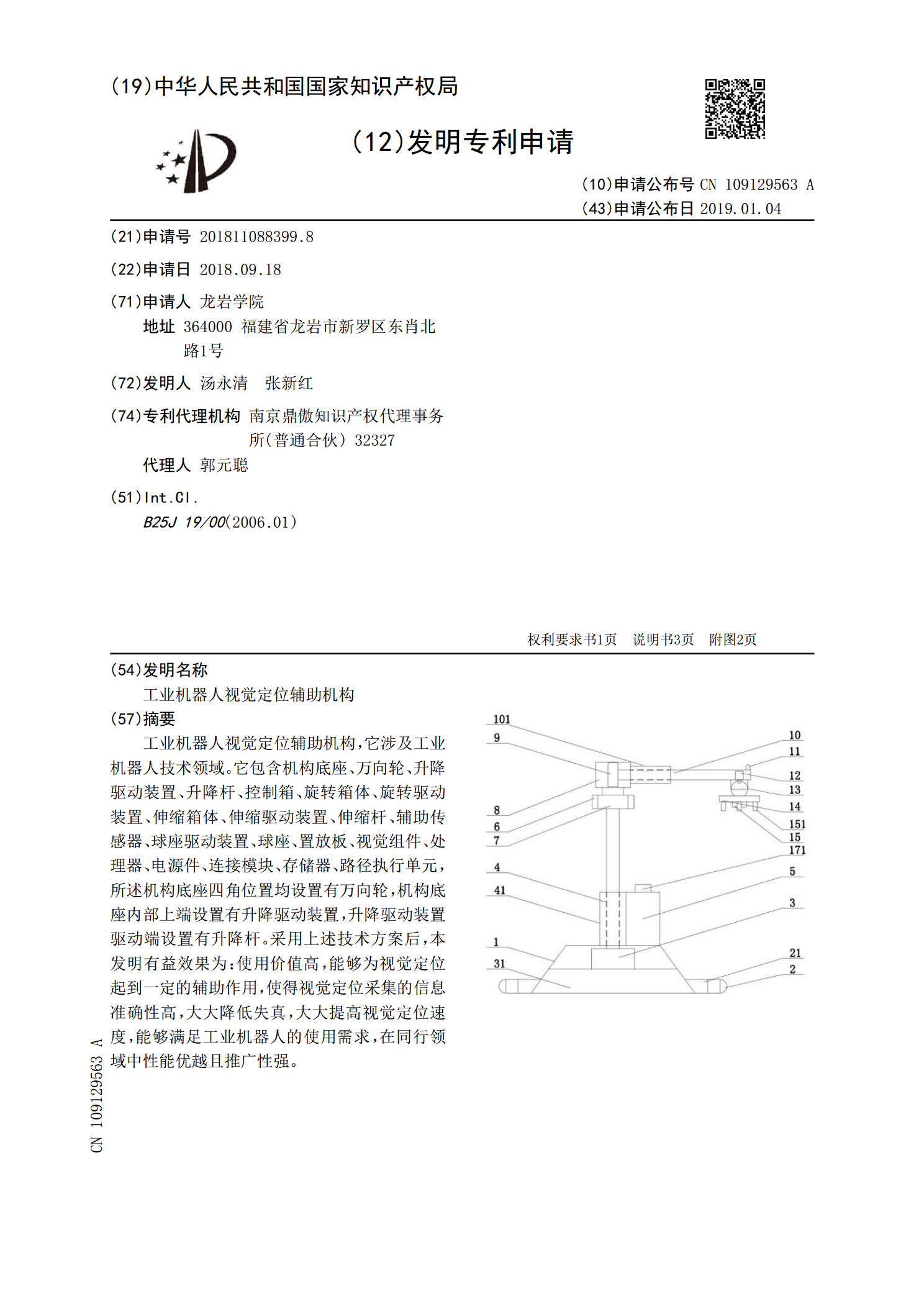
工业机器人视觉定位辅助机构,它涉及工业机器人技术领域。它包含机构底座、万向轮、升降驱动装置、升降杆、控制箱、旋转箱体、旋转驱动装置、伸缩箱体、伸缩驱动装置、伸缩杆、辅助传感器、球座驱动装置、球座、置放板、视觉组件、处理器、电源件、连接模块、存储器、路径执行单元,所述机构底座四角位置均设置有万向轮,机构底座内部上端设置有升降驱动装置,升降驱动装置驱动端设置有升降杆。采用上述技术方案后,本发明有益效果为:使用价值高,能够为视觉定位起到一定的辅助作用,使得视觉定位采集的信息准确性高,大大降低失真,大大提高视觉定

物料分拣机器人视觉定位系统研究.docx
物料分拣机器人视觉定位系统研究随着移动智能化技术和物联网技术的快速发展,机器人技术已经逐渐融入了我们的生产生活中。尤其在物流、制造行业中,机器人可以帮助企业实现生产自动化和提高生产效率。而物料分拣机器人作为一种智能高效的生产设备,越来越受到企业和市场的关注。1.物料分拣机器人的应用场景和技术需求物料分拣机器人主要应用于生产、制造、物流等环节的物料分拣和库存管理。传统的物料分拣需要耗费大量的人力物力,不仅效率低下,还容易出现人为误差,并且难以适应高负荷和多样化的物料处理。而物料分拣机器人可以利用视觉定位系统

砖窑卸垛机器人视觉定位系统研究.docx
砖窑卸垛机器人视觉定位系统研究一、引言砖窑生产过程中,砖坯通常都是堆放在砖窑旁边的码垛上,待砖窑空出位置后,卸垛机器人会实行控制,进入到砖坯所在的码垛上方,将砖坯依次取下后放置到砖窑中。而在卸垛过程中,机器人需要通过视觉定位系统确保每次提取的砖坯位置准确无误,提高生产效率的同时,降低砖坯运输搬运的成本。本论文旨在探究砖窑卸垛机器人视觉定位系统的实现方式及其优缺点,为砖窑企业提供技术参考与支持。二、砖窑卸垛机器人视觉定位系统的实现方式1.传统定位方式在传统的砖窑卸垛机器人中,定位方式主要是通过机械臂上的夹爪