
清障机器人的线上行走总成.pdf

小新****ou


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

清障机器人的线上行走总成.pdf
本发明涉及一种清障机器人的线上行走总成,其创新点在于:包括机体,以及在机体上设置的行走锁紧机构,所述行走锁紧机构包括行走开合单元、行走单元、行走开合锁紧单元和悬停锁紧单元,所述行走开合单元包括开合行走挂轮、开合臂、开合电机和转轴,所述机体上设有两组平行布置转轴,每个转轴上设有开合臂,两个开合臂通过臂齿啮合,所述机体上设有驱动一个转轴转动的开合电机,每个开合臂的内侧分别设有开合行走挂轮,所述行走单元包括行走电机,所述行走电机的动力输出轴与该开合臂上的开合行走挂轮传动连接,所述开合臂的顶部设有行走开合锁紧单元
行走轮总成.pdf
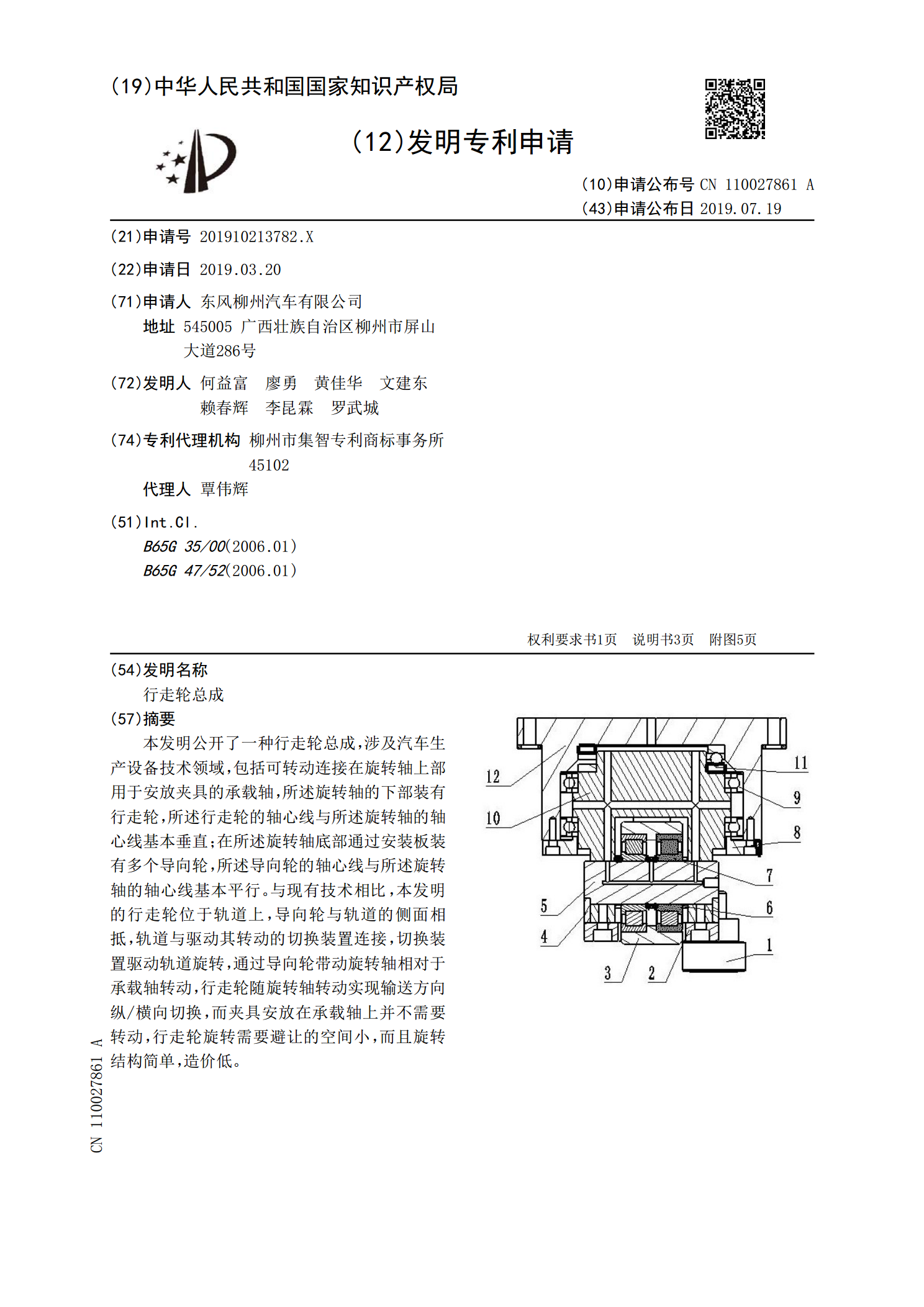
本发明公开了一种行走轮总成,涉及汽车生产设备技术领域,包括可转动连接在旋转轴上部用于安放夹具的承载轴,所述旋转轴的下部装有行走轮,所述行走轮的轴心线与所述旋转轴的轴心线基本垂直;在所述旋转轴底部通过安装板装有多个导向轮,所述导向轮的轴心线与所述旋转轴的轴心线基本平行。与现有技术相比,本发明的行走轮位于轨道上,导向轮与轨道的侧面相抵,轨道与驱动其转动的切换装置连接,切换装置驱动轨道旋转,通过导向轮带动旋转轴相对于承载轴转动,行走轮随旋转轴转动实现输送方向纵/横向切换,而夹具安放在承载轴上并不需要转动,行走轮

高压输电线上机器人的行走机构.pdf
本发明公开了一种高压输电线上机器人的行走机构,其特征在于,在机器人本体上安装有3个行走臂:前臂、中臂和后臂,机器人在输电线行走时,前臂和后臂在输电线的一侧,中臂在输电线的另一侧;每一个行走臂包括行走轮、升降臂、刹车机构和摆臂,所述的摆臂一端通过摆动关节与机器人本体连接,另一端与升降臂下端相连,行走轮安装在升降臂上端的侧部,刹车机构安装在升降臂上,刹车机构的位置在行走轮的下方。该行走机构能带动机器人方便地越过输电线上的各种障碍、稳定性好。
机器人脚轮、行走机器人及行走机器人的控制方法.pdf
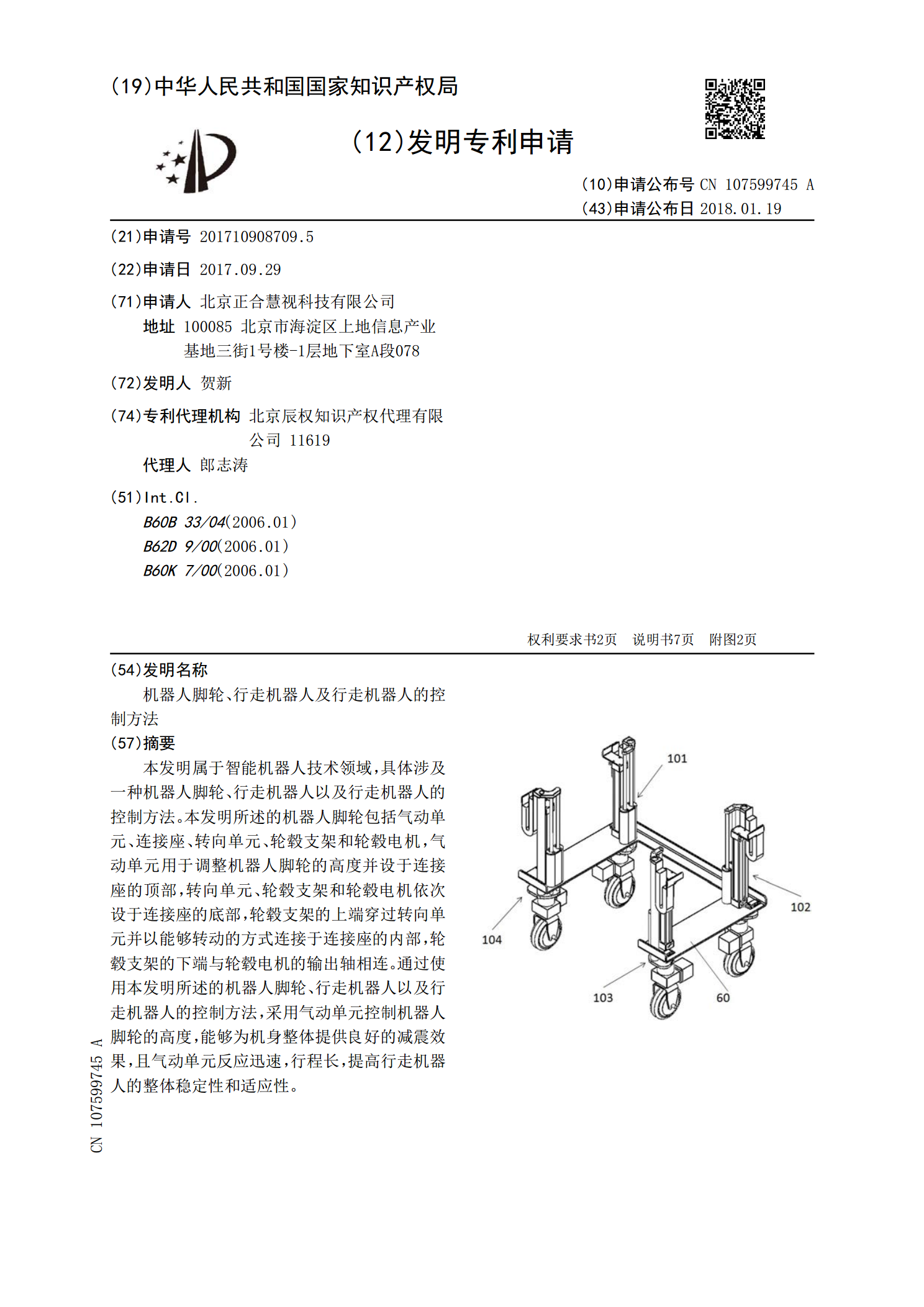
本发明属于智能机器人技术领域,具体涉及一种机器人脚轮、行走机器人以及行走机器人的控制方法。本发明所述的机器人脚轮包括气动单元、连接座、转向单元、轮毂支架和轮毂电机,气动单元用于调整机器人脚轮的高度并设于连接座的顶部,转向单元、轮毂支架和轮毂电机依次设于连接座的底部,轮毂支架的上端穿过转向单元并以能够转动的方式连接于连接座的内部,轮毂支架的下端与轮毂电机的输出轴相连。通过使用本发明所述的机器人脚轮、行走机器人以及行走机器人的控制方法,采用气动单元控制机器人脚轮的高度,能够为机身整体提供良好的减震效果,且气动

行走机器人及其行走方法.pdf
提供了一种行走机器人及其行走方法。该行走机器人包括行走齿轮、第一齿条、第二齿条以及多个夹爪。第一齿条与行走齿轮啮合,沿行走机器人的行走方向延伸。第二齿条与行走齿轮啮合,与第一齿条平行。在行走齿轮转动的过程中第一齿条和第二齿条能够沿着行走方向朝向相反侧运动。夹爪用于夹持或松开目标对象。多个夹爪中的一个夹爪与第一齿条固定,多个夹爪中的另一个夹爪与第二齿条固定。这样,行走机器人能够具有较短的行走时间,并且具有较高的驱动效率和稳定性。