
支腿控制系统和工程机械.pdf

努力****星驰

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
支腿控制系统和工程机械.pdf
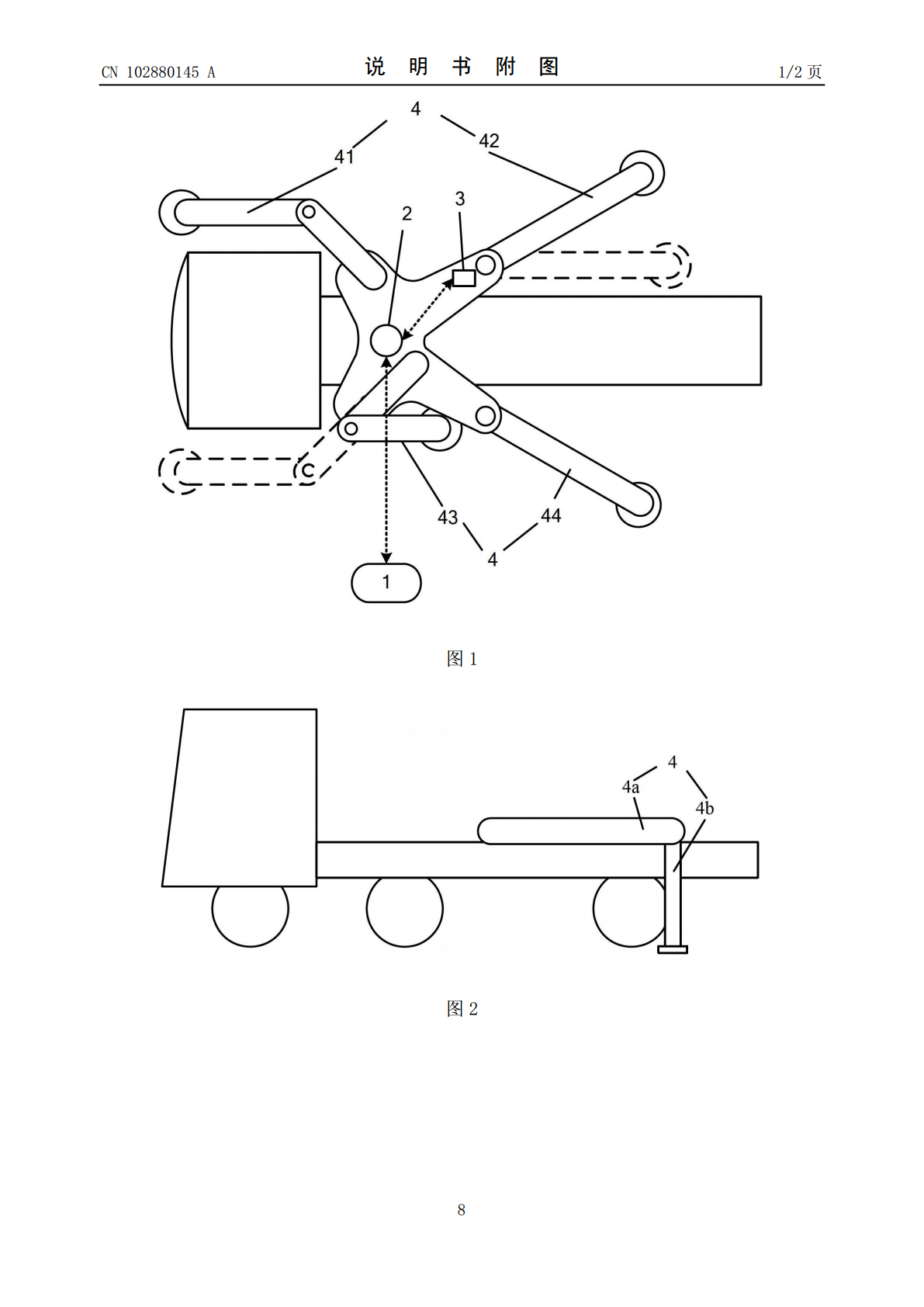
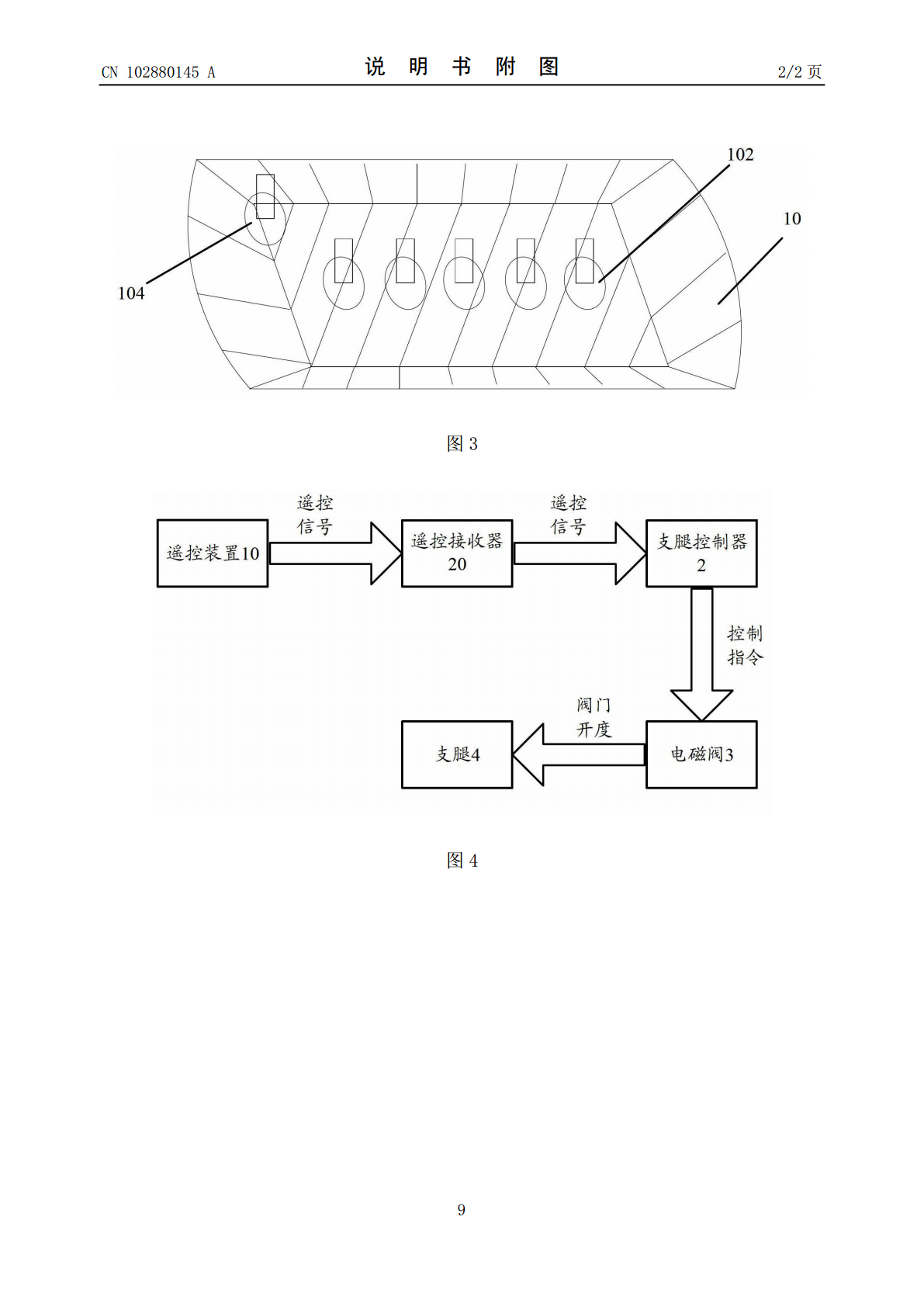
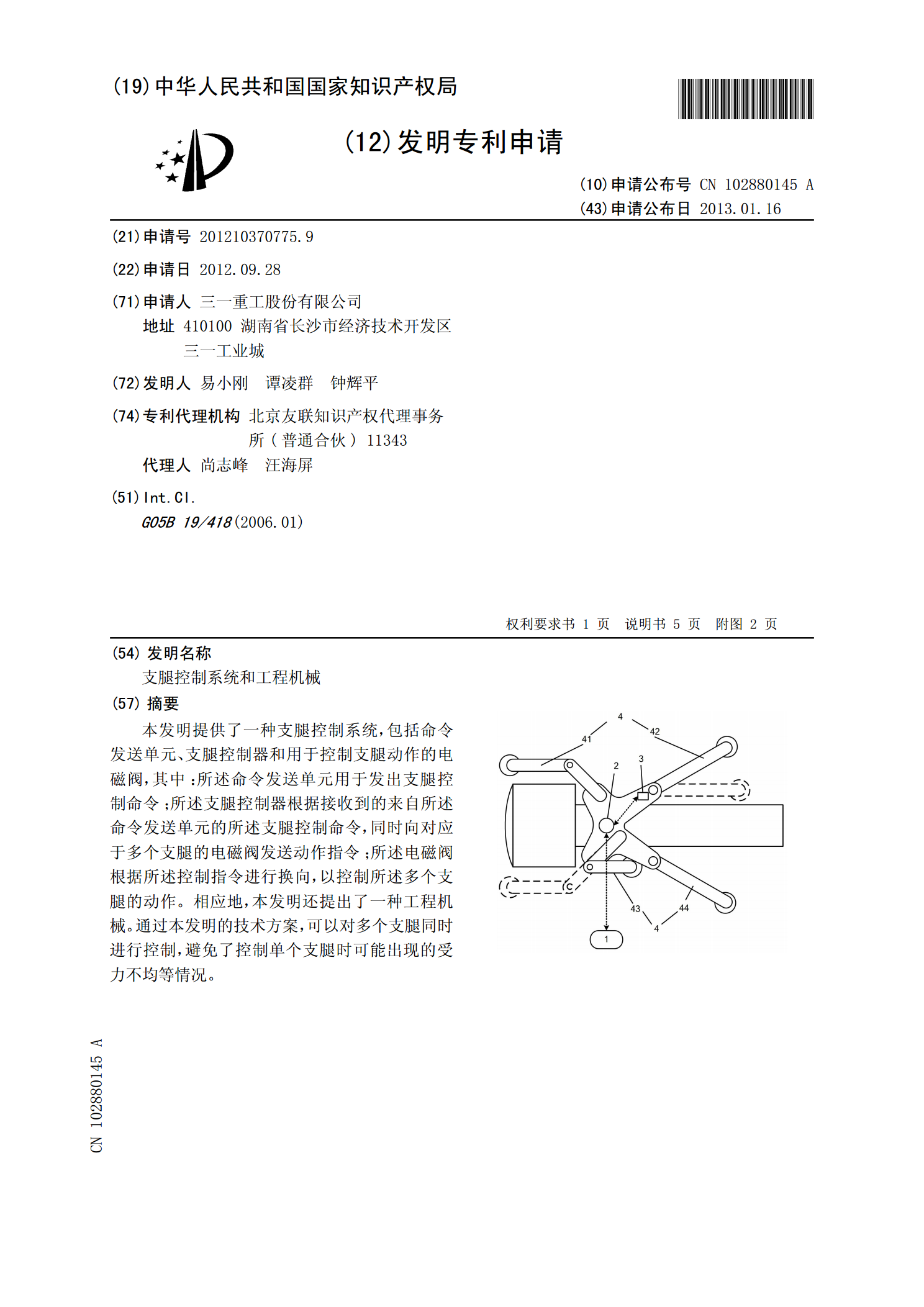
本发明提供了一种支腿控制系统,包括命令发送单元、支腿控制器和用于控制支腿动作的电磁阀,其中:所述命令发送单元用于发出支腿控制命令;所述支腿控制器根据接收到的来自所述命令发送单元的所述支腿控制命令,同时向对应于多个支腿的电磁阀发送动作指令;所述电磁阀根据所述控制指令进行换向,以控制所述多个支腿的动作。相应地,本发明还提出了一种工程机械。通过本发明的技术方案,可以对多个支腿同时进行控制,避免了控制单个支腿时可能出现的受力不均等情况。
支腿式工程机械、支腿控制系统及方法.pdf
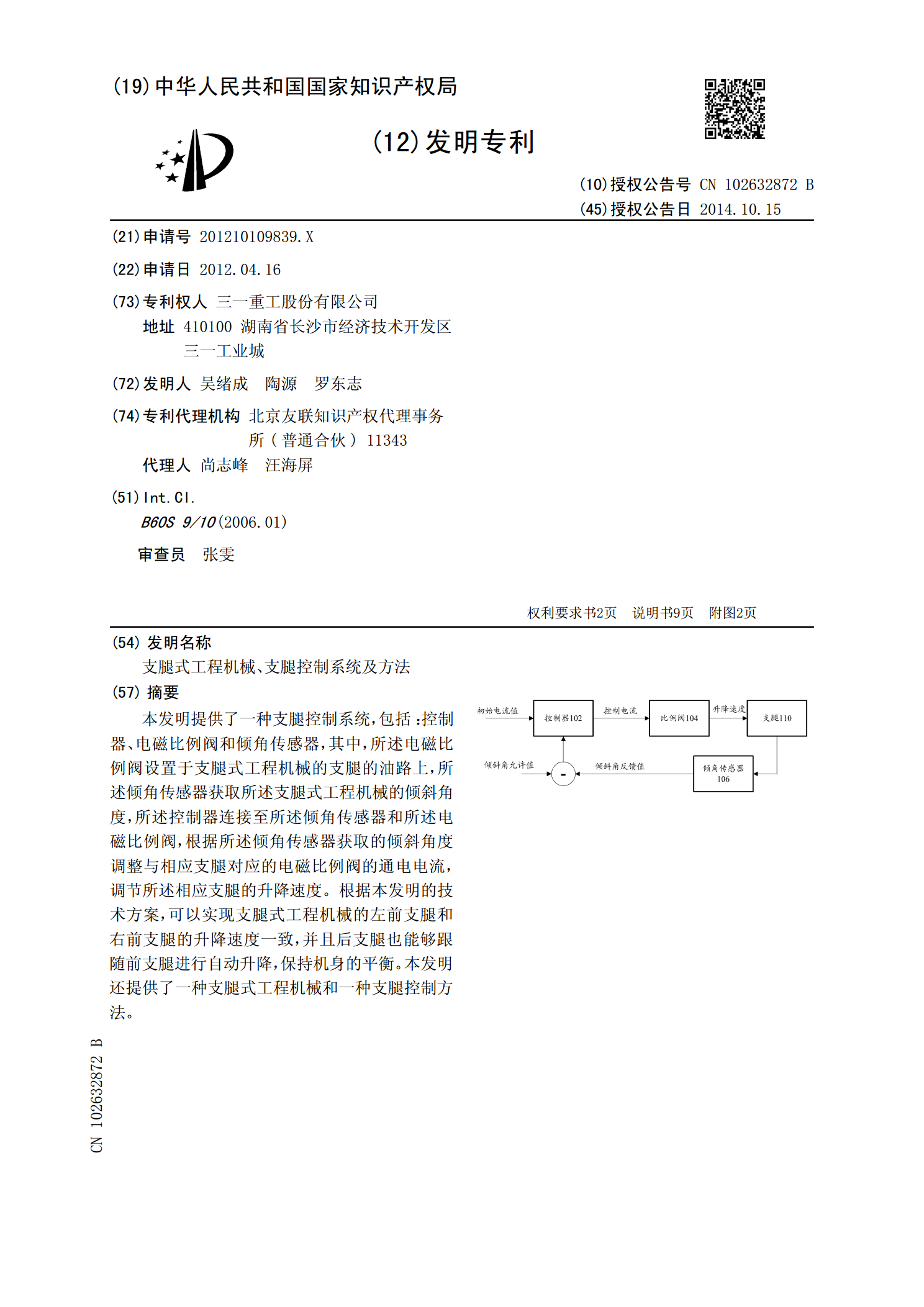
本发明提供了一种支腿控制系统,包括:控制器、电磁比例阀和倾角传感器,其中,所述电磁比例阀设置于支腿式工程机械的支腿的油路上,所述倾角传感器获取所述支腿式工程机械的倾斜角度,所述控制器连接至所述倾角传感器和所述电磁比例阀,根据所述倾角传感器获取的倾斜角度调整与相应支腿对应的电磁比例阀的通电电流,调节所述相应支腿的升降速度。根据本发明的技术方案,可以实现支腿式工程机械的左前支腿和右前支腿的升降速度一致,并且后支腿也能够跟随前支腿进行自动升降,保持机身的平衡。本发明还提供了一种支腿式工程机械和一种支腿控制方法。
支腿升降控制系统和方法、及工程机械.pdf
本发明公开了一种支腿升降控制系统和方法、及工程机械,涉及控制技术领域,其中,系统包括:长度传感器,用于检测工程机械的每个支腿的伸长量;控制器,用于根据每个支腿的伸长量控制每个支腿的升降速度。本发明实施例根据支腿的伸长量来控制支腿的升降速度,可以使得工程机械整机平稳升降,减小支腿之间、支腿与工程机械本身之间的冲撞。
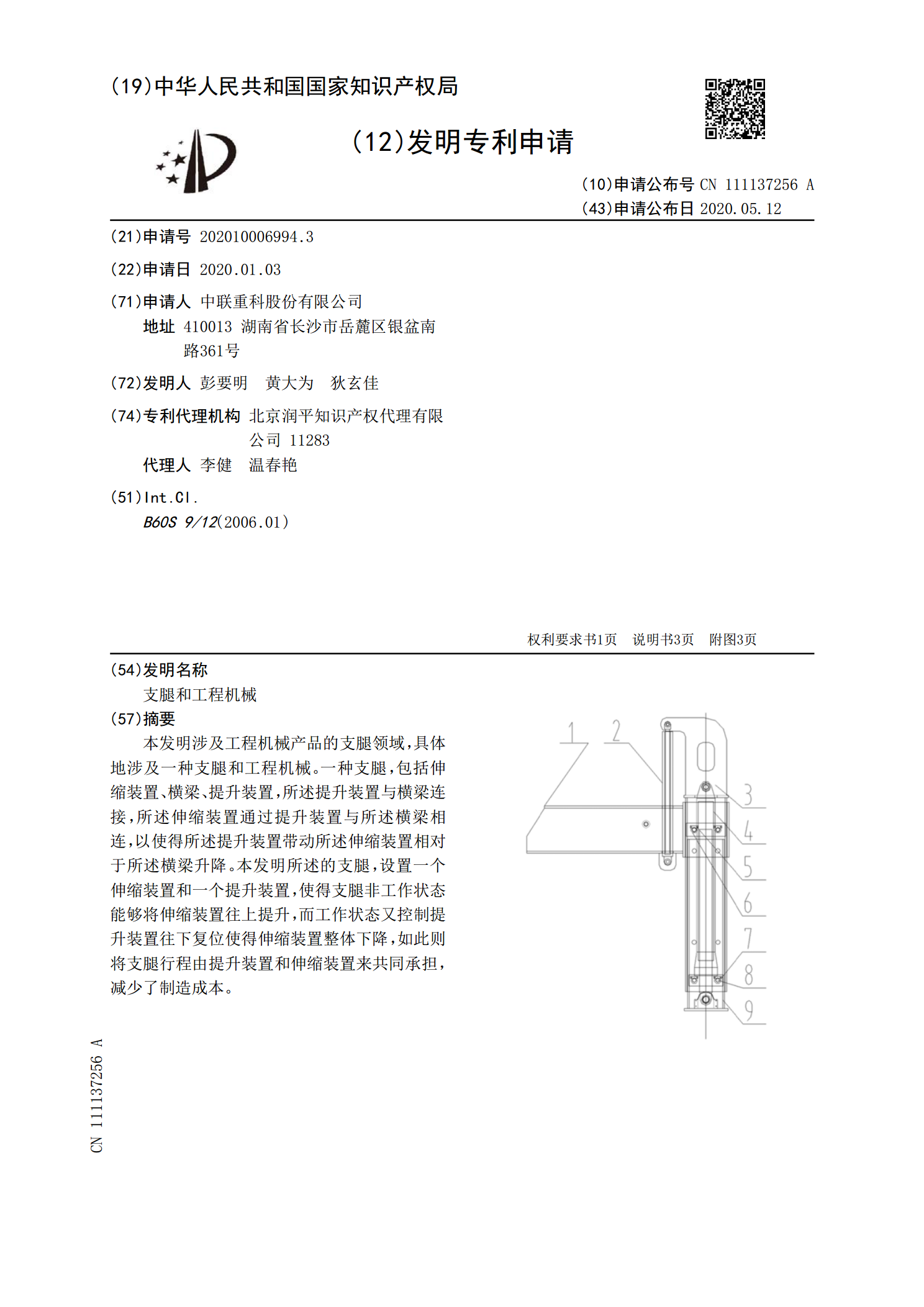
支腿和工程机械.pdf
本发明涉及工程机械产品的支腿领域,具体地涉及一种支腿和工程机械。一种支腿,包括伸缩装置、横梁、提升装置,所述提升装置与横梁连接,所述伸缩装置通过提升装置与所述横梁相连,以使得所述提升装置带动所述伸缩装置相对于所述横梁升降。本发明所述的支腿,设置一个伸缩装置和一个提升装置,使得支腿非工作状态能够将伸缩装置往上提升,而工作状态又控制提升装置往下复位使得伸缩装置整体下降,如此则将支腿行程由提升装置和伸缩装置来共同承担,减少了制造成本。
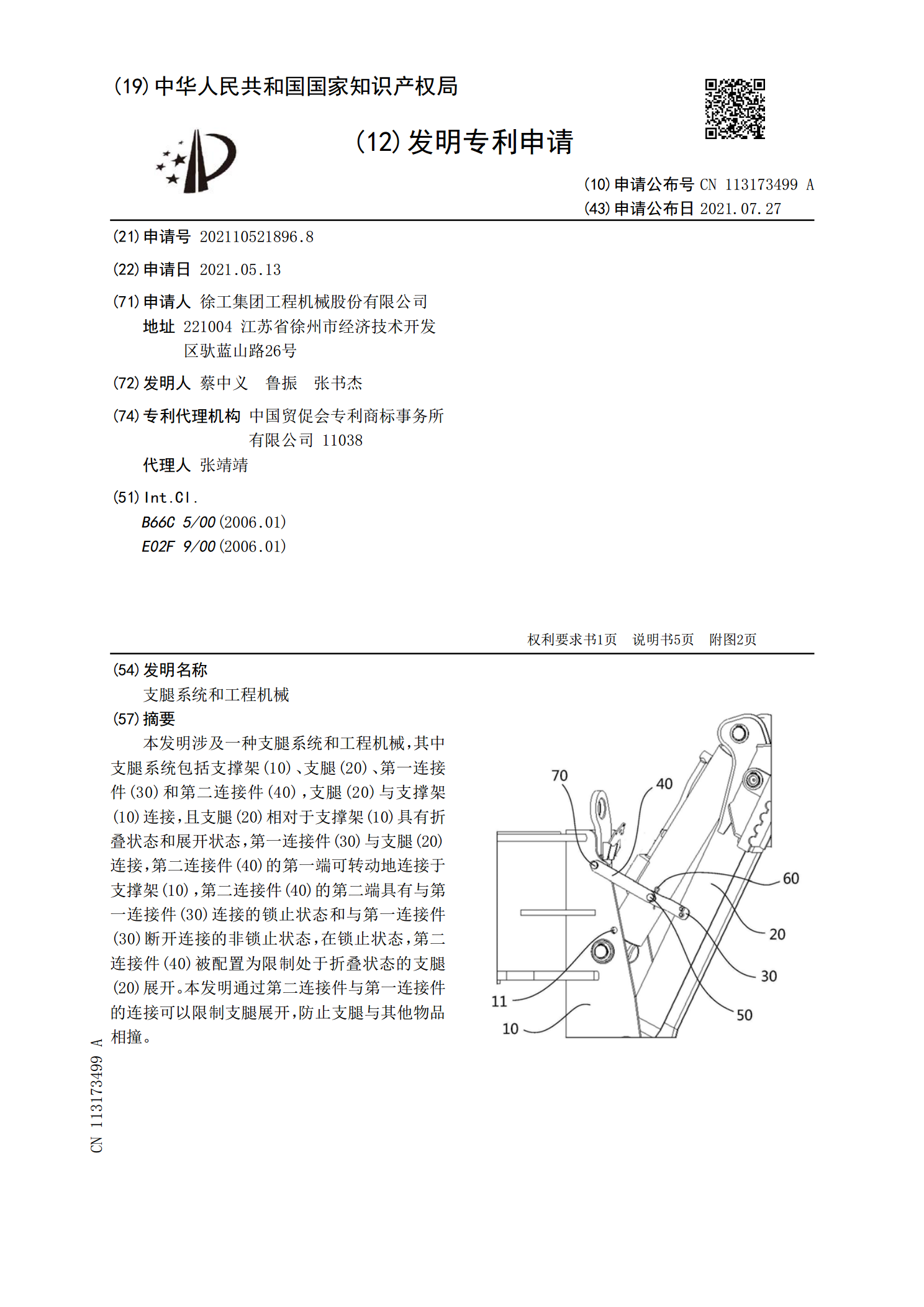
支腿系统和工程机械.pdf
本发明涉及一种支腿系统和工程机械,其中支腿系统包括支撑架(10)、支腿(20)、第一连接件(30)和第二连接件(40),支腿(20)与支撑架(10)连接,且支腿(20)相对于支撑架(10)具有折叠状态和展开状态,第一连接件(30)与支腿(20)连接,第二连接件(40)的第一端可转动地连接于支撑架(10),第二连接件(40)的第二端具有与第一连接件(30)连接的锁止状态和与第一连接件(30)断开连接的非锁止状态,在锁止状态,第二连接件(40)被配置为限制处于折叠状态的支腿(20)展开。本发明通过第二连接件与