
摆动支腿安装结构、控制装置、系统、控制方法及工程机械.pdf

书生****12


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

摆动支腿安装结构、控制装置、系统、控制方法及工程机械.pdf
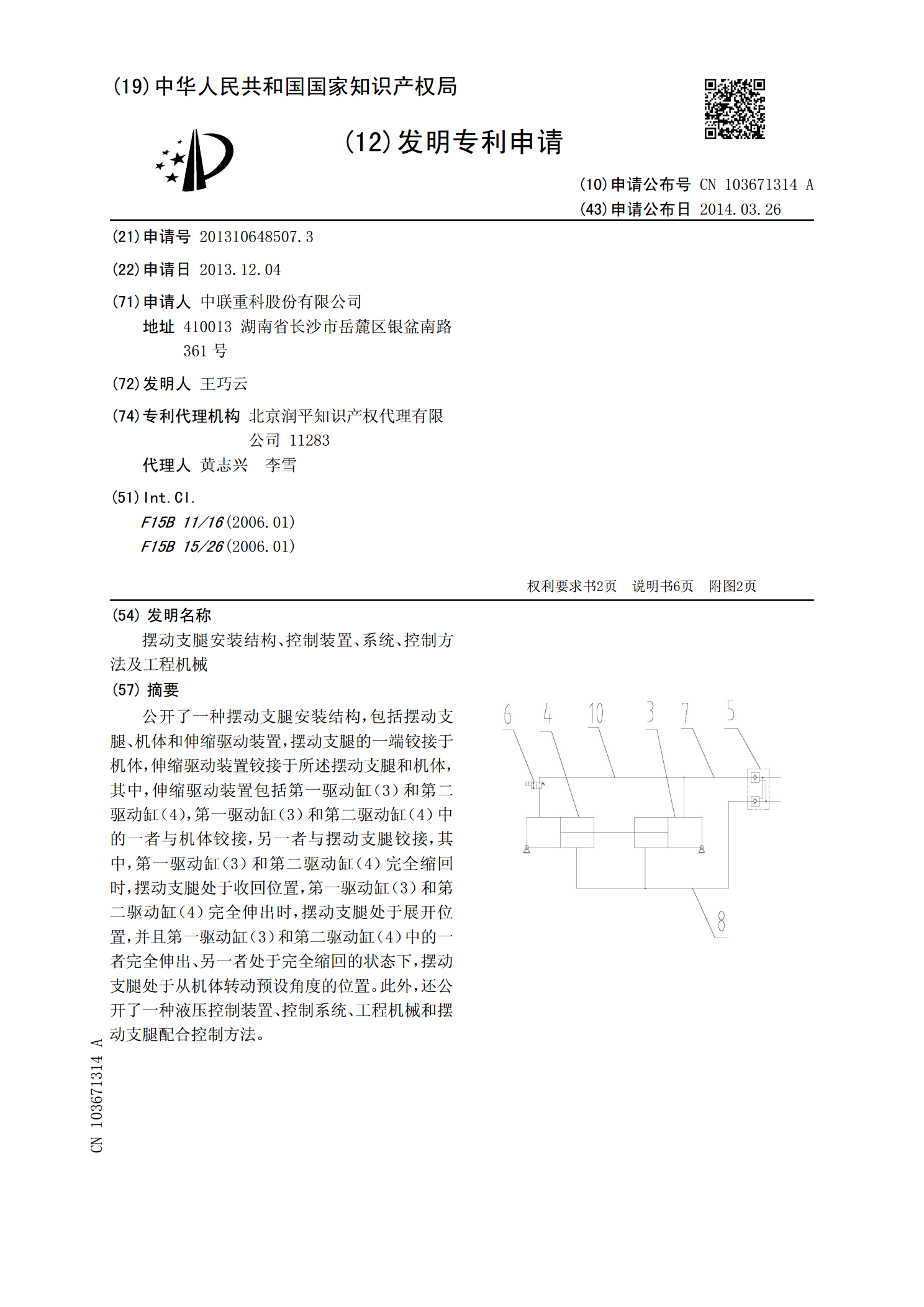
公开了一种摆动支腿安装结构,包括摆动支腿、机体和伸缩驱动装置,摆动支腿的一端铰接于机体,伸缩驱动装置铰接于所述摆动支腿和机体,其中,伸缩驱动装置包括第一驱动缸(3)和第二驱动缸(4),第一驱动缸(3)和第二驱动缸(4)中的一者与机体铰接,另一者与摆动支腿铰接,其中,第一驱动缸(3)和第二驱动缸(4)完全缩回时,摆动支腿处于收回位置,第一驱动缸(3)和第二驱动缸(4)完全伸出时,摆动支腿处于展开位置,并且第一驱动缸(3)和第二驱动缸(4)中的一者完全伸出、另一者处于完全缩回的状态下,摆动支腿处于从机体转动预
摆动支腿安装结构、控制装置、系统、控制方法及工程机械.pdf
公开了一种摆动支腿安装结构,包括摆动支腿、机体和伸缩驱动装置,摆动支腿的一端铰接于机体,伸缩驱动装置铰接于所述摆动支腿和机体,其中,伸缩驱动装置包括第一驱动缸(3)和第二驱动缸(4),第一驱动缸(3)和第二驱动缸(4)中的一者与机体铰接,另一者与摆动支腿铰接,其中,第一驱动缸(3)和第二驱动缸(4)完全缩回时,摆动支腿处于收回位置,第一驱动缸(3)和第二驱动缸(4)完全伸出时,摆动支腿处于展开位置,并且第一驱动缸(3)和第二驱动缸(4)中的一者完全伸出、另一者处于完全缩回的状态下,摆动支腿处于从机体转动预
支腿式工程机械、支腿控制系统及方法.pdf
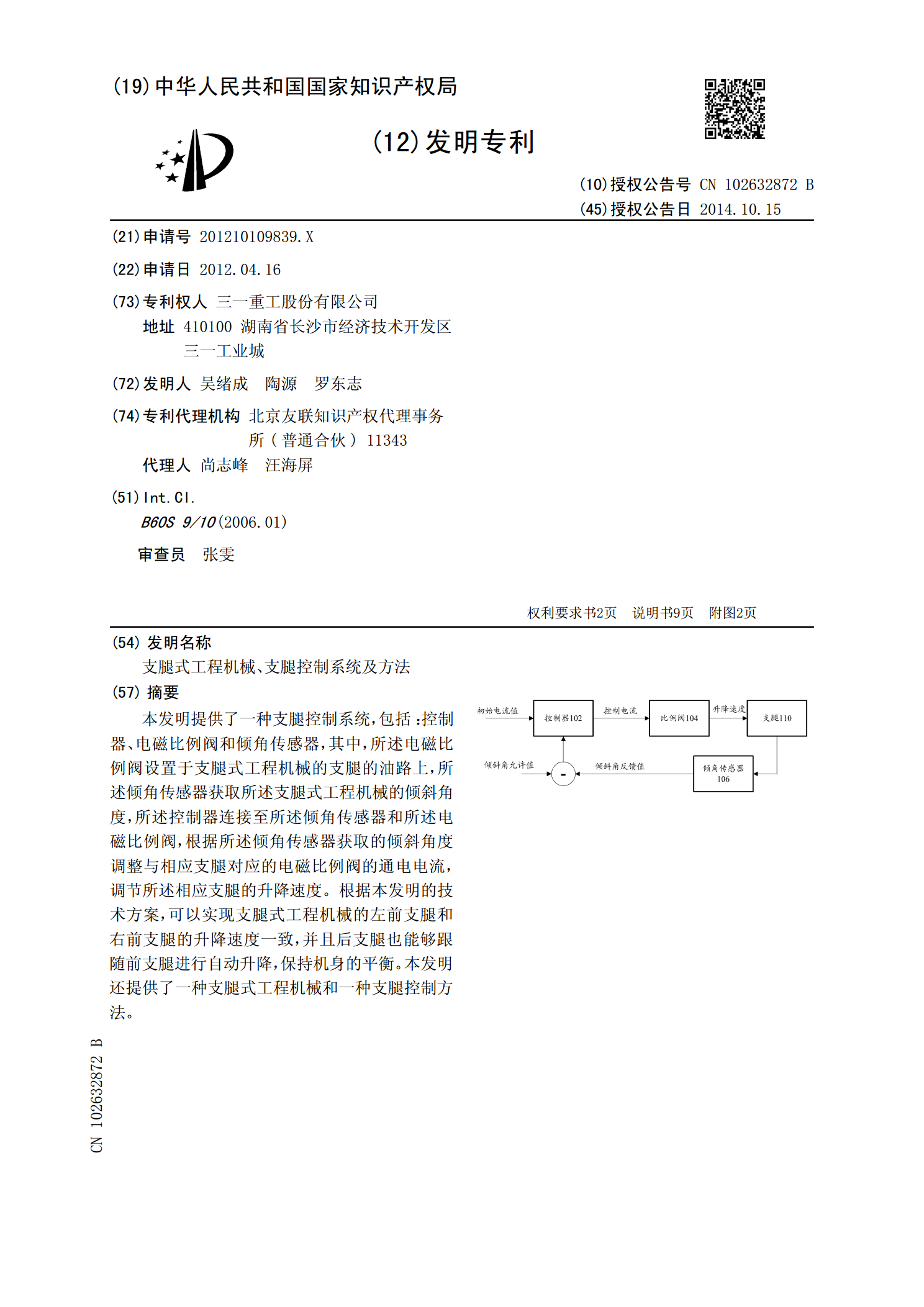
本发明提供了一种支腿控制系统,包括:控制器、电磁比例阀和倾角传感器,其中,所述电磁比例阀设置于支腿式工程机械的支腿的油路上,所述倾角传感器获取所述支腿式工程机械的倾斜角度,所述控制器连接至所述倾角传感器和所述电磁比例阀,根据所述倾角传感器获取的倾斜角度调整与相应支腿对应的电磁比例阀的通电电流,调节所述相应支腿的升降速度。根据本发明的技术方案,可以实现支腿式工程机械的左前支腿和右前支腿的升降速度一致,并且后支腿也能够跟随前支腿进行自动升降,保持机身的平衡。本发明还提供了一种支腿式工程机械和一种支腿控制方法。
一种工程机械支腿展收的控制方法、装置及系统.pdf
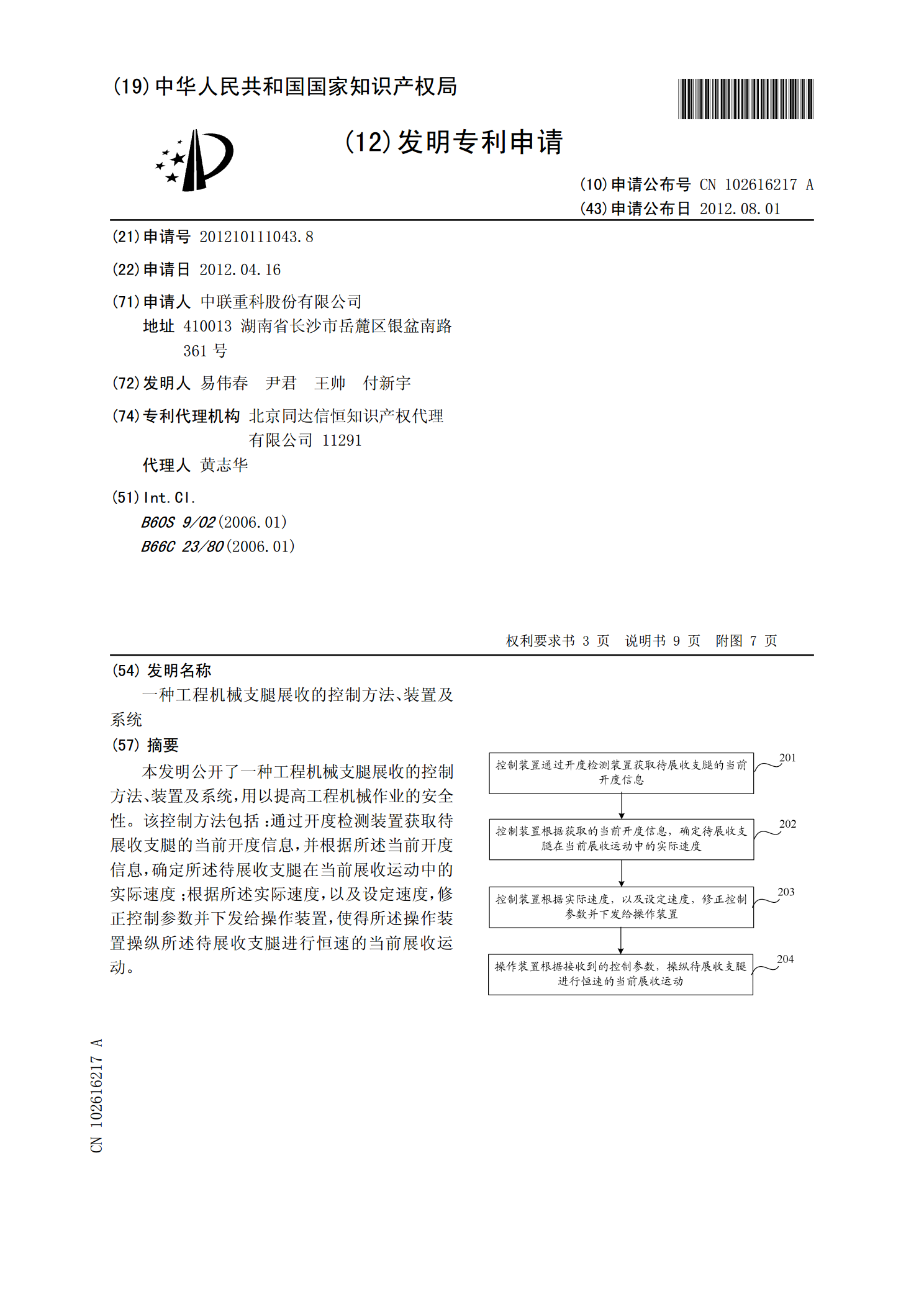
本发明公开了一种工程机械支腿展收的控制方法、装置及系统,用以提高工程机械作业的安全性。该控制方法包括:通过开度检测装置获取待展收支腿的当前开度信息,并根据所述当前开度信息,确定所述待展收支腿在当前展收运动中的实际速度;根据所述实际速度,以及设定速度,修正控制参数并下发给操作装置,使得所述操作装置操纵所述待展收支腿进行恒速的当前展收运动。
液压控制系统、支腿装置和控制方法.pdf
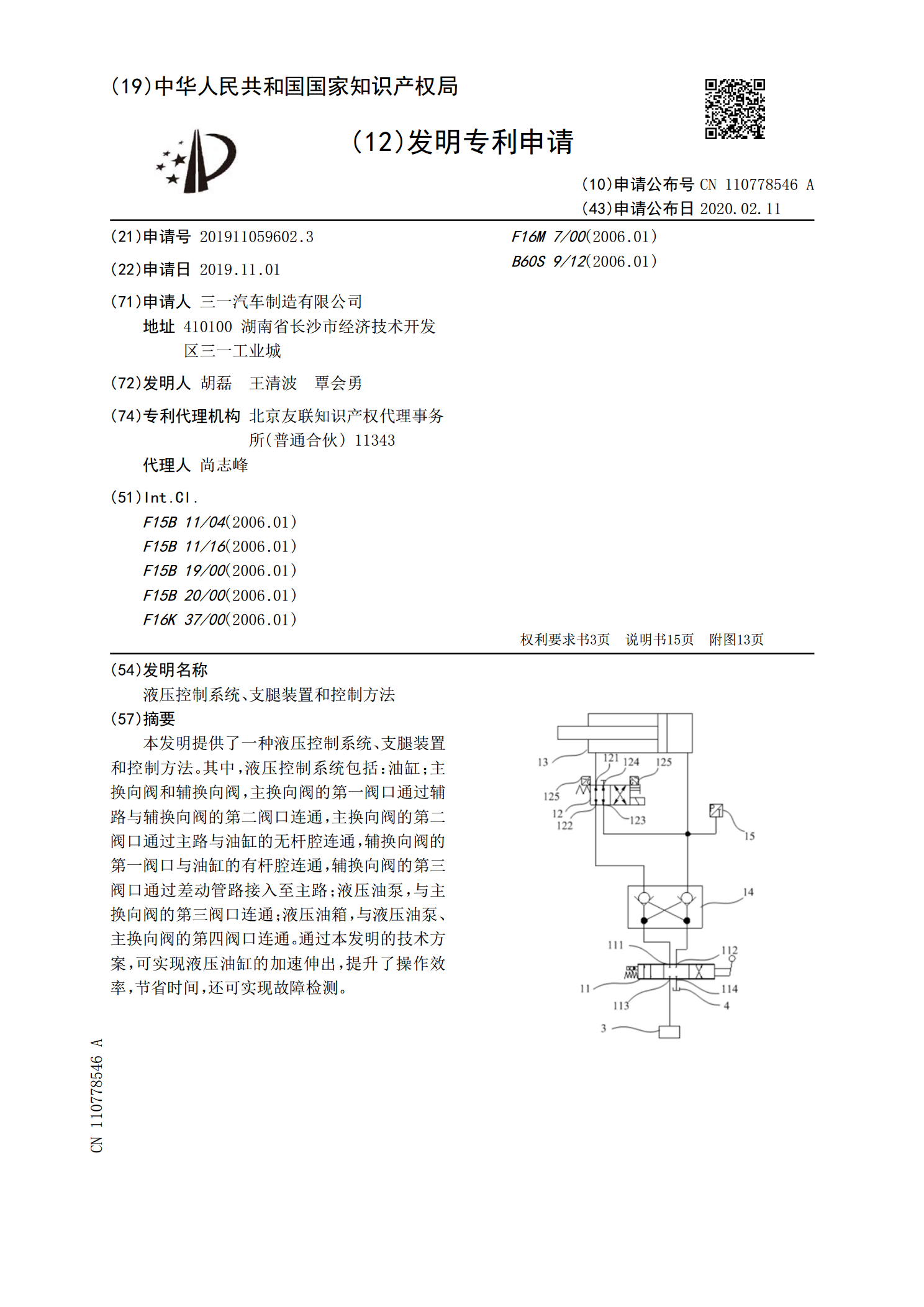
本发明提供了一种液压控制系统、支腿装置和控制方法。其中,液压控制系统包括:油缸;主换向阀和辅换向阀,主换向阀的第一阀口通过辅路与辅换向阀的第二阀口连通,主换向阀的第二阀口通过主路与油缸的无杆腔连通,辅换向阀的第一阀口与油缸的有杆腔连通,辅换向阀的第三阀口通过差动管路接入至主路;液压油泵,与主换向阀的第三阀口连通;液压油箱,与液压油泵、主换向阀的第四阀口连通。通过本发明的技术方案,可实现液压油缸的加速伸出,提升了操作效率,节省时间,还可实现故障检测。