
攻击型四足轮式机器人.pdf

莉娜****ua

1/8
2/8

3/8

4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

攻击型四足轮式机器人.pdf
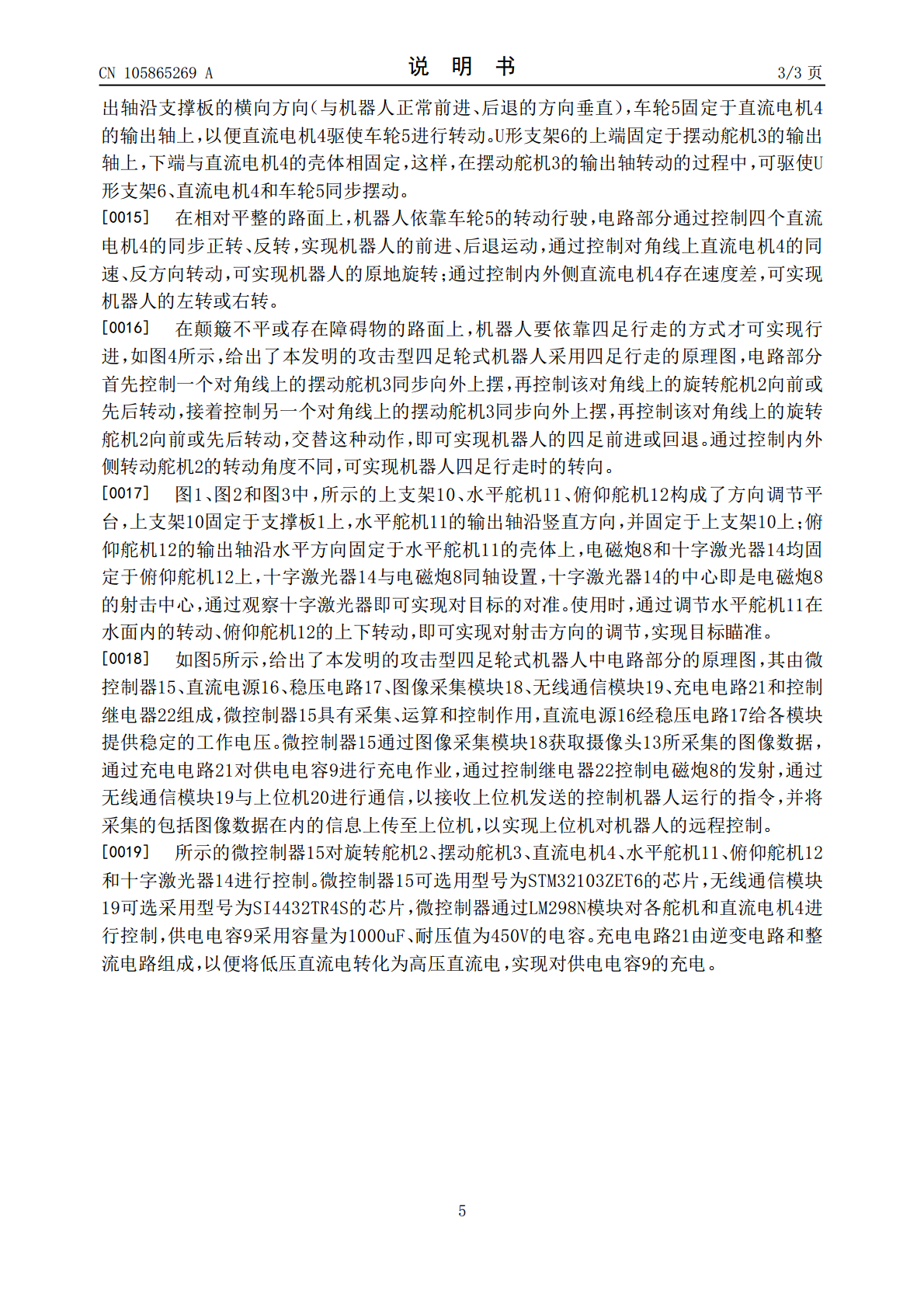
本发明的攻击型四足轮式机器人,包括支撑板、电路板、四个支腿,特征在于:每个支腿均由旋转舵机、摆动舵机、直流电机和车轮组成,旋转舵机的输出轴沿竖向方向固定于支撑板上,摆动舵机的壳体与旋转舵机的壳体相固定,摆动舵机的输出轴沿支撑板的纵向方向,直流电机的输出轴沿支撑板的横向方向,直流电机经U形支架与摆动舵机的输出轴相固定,车轮固定于直流电机的输出轴上;支撑板上设置有电磁炮和供电电容。本发明的机器人,对直流电机控制,可实现机器人快速的前进、后退、转弯、原地旋转,对摆动舵机、旋转舵机的控制,可实现机器人的四足行走,

一种四足轮式机器人.pdf
本发明涉及机器人技术领域,公开了一种四足轮式机器人,包括:躯干、轮式运动机构以及安装在躯干上的四条腿部运动机构;轮式运动机构包括动力元件以及安装在躯干底部的至少三个轮子,动力元件驱动至少一个轮子转动;腿部运动机构包括第一驱动结构、第一支腿、第二驱动结构以及第二支腿,第一支腿的一端与躯干铰接,第一支腿的另一端与第二支腿的一端铰接。本申请提供的一种四足轮式机器人,在行驶的过程中,第一支腿以及第二支腿脱离地面后,腿部运动机构不再承受躯干的重力,降低了腿部关节无谓的能量消耗,提高了机器人的续航能力,也减少了对腿部

轮式升降型双足轮式机器人.pdf
本发明提供一种轮式升降型双足轮式运动机构,包括底盘与滚轮,其特征在于:所述滚轮嵌置于底盘内部,底盘内设置升降通道;所述滚轮与升降机构连接,在升降机构的带动下,滚轮沿底盘内的升降通道下降伸出底盘下部或上升至底盘内部,实现足式与轮式切换。采用双足轮式运动机构的机器人的双足步行移动方式,具有很高的灵活性,轮式移动方式,在平坦路面具有移动速度快、稳定性好的优点,而且能够实现在双足步行与轮式移动两种移动形式之间平稳切换,轮式方式与足式方式互不影响,大大提高了机器人的环境适应性和工作效率。

轮式驱动直线排列可旋转四足机器人.pdf
本发明的目的在于提供轮式驱动直线排列可旋转四足机器人,机器人的四足采用直线排列可旋转结构设计,四足可以围绕机架中心进行360度转动。其次,足、腿采用分别驱动控制的方式,分别用电机驱动和舵机控制机器人的腿和足的运动。机器人的四足运动机构采用电机驱动轮式结构,应用电机驱动机器人的四足移动,从而可以实现机器人的整体高速移动。本发明是一种基于电机驱动和舵机控制的直线排列可旋转四足机器人,机器人的四足采用直线排列可旋转结构设计,四足可以围绕机架中心进行360度旋转,从而极大的提高了四足机器人的越障能力及扩展应用能力
多足轮式平台机器人.pdf
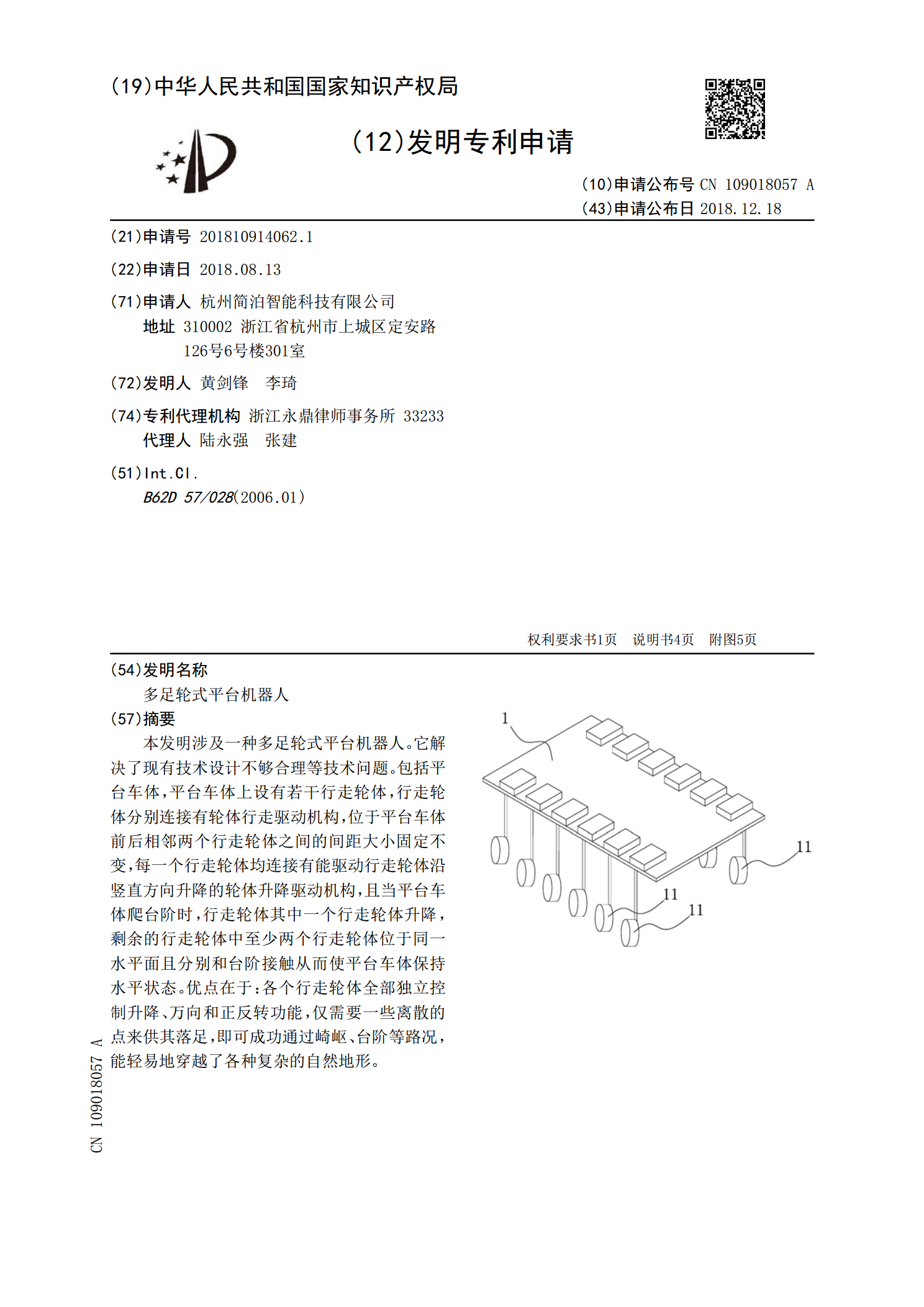
本发明涉及一种多足轮式平台机器人。它解决了现有技术设计不够合理等技术问题。包括平台车体,平台车体上设有若干行走轮体,行走轮体分别连接有轮体行走驱动机构,位于平台车体前后相邻两个行走轮体之间的间距大小固定不变,每一个行走轮体均连接有能驱动行走轮体沿竖直方向升降的轮体升降驱动机构,且当平台车体爬台阶时,行走轮体其中一个行走轮体升降,剩余的行走轮体中至少两个行走轮体位于同一水平面且分别和台阶接触从而使平台车体保持水平状态。优点在于:各个行走轮体全部独立控制升降、万向和正反转功能,仅需要一些离散的点来供其落足,即