
多足轮式平台机器人.pdf

是你****枝呀


1/10
2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多足轮式平台机器人.pdf
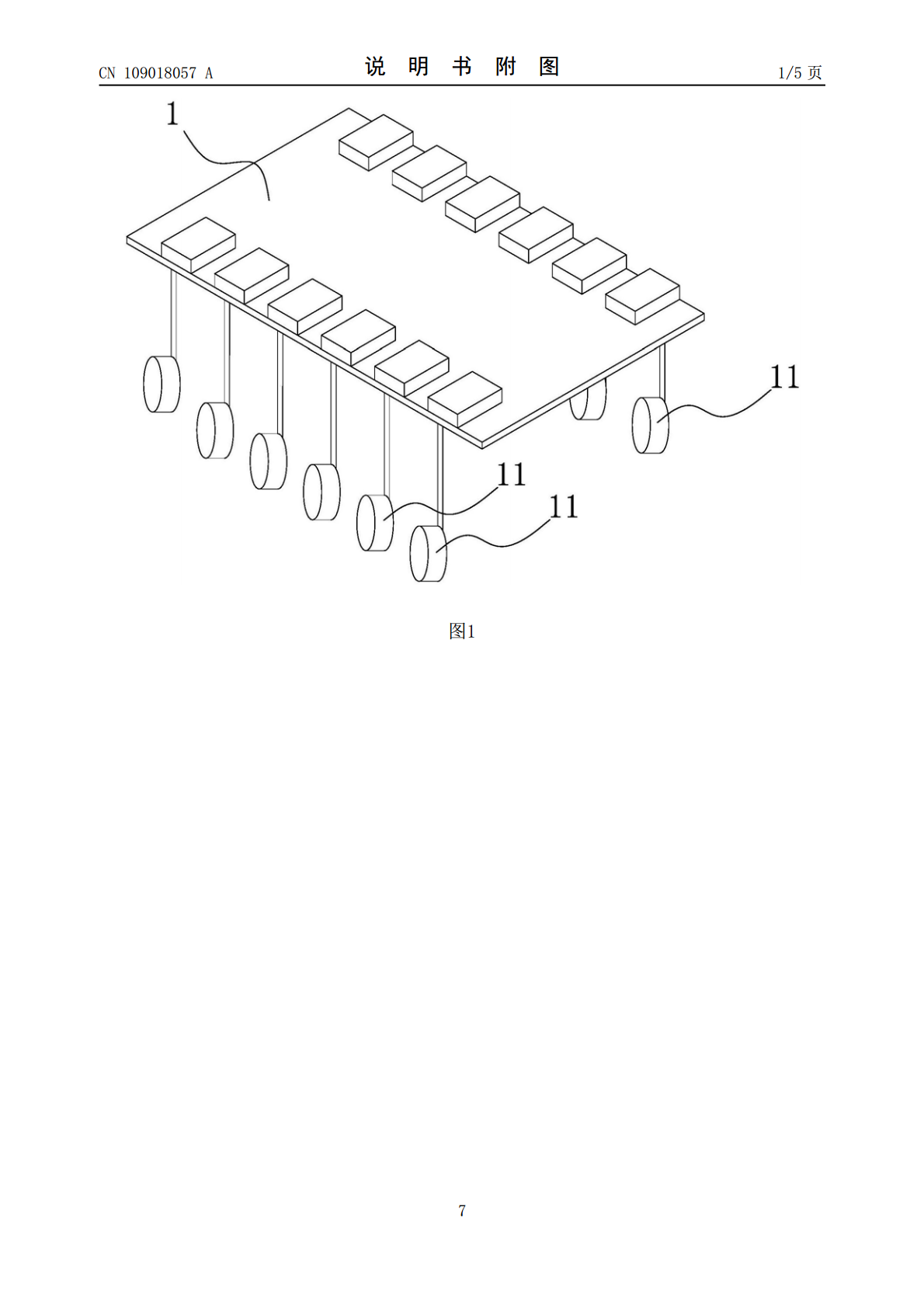
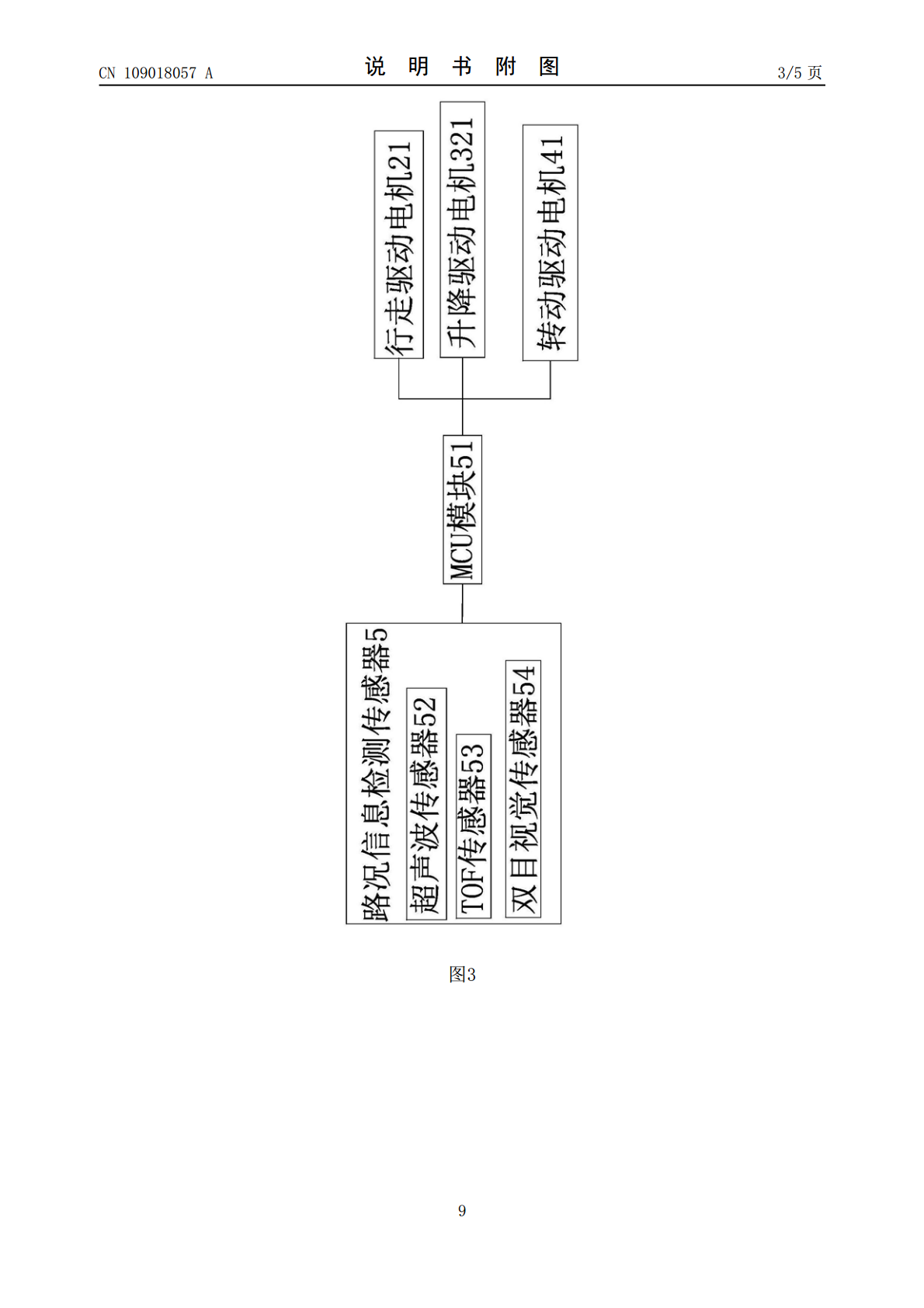
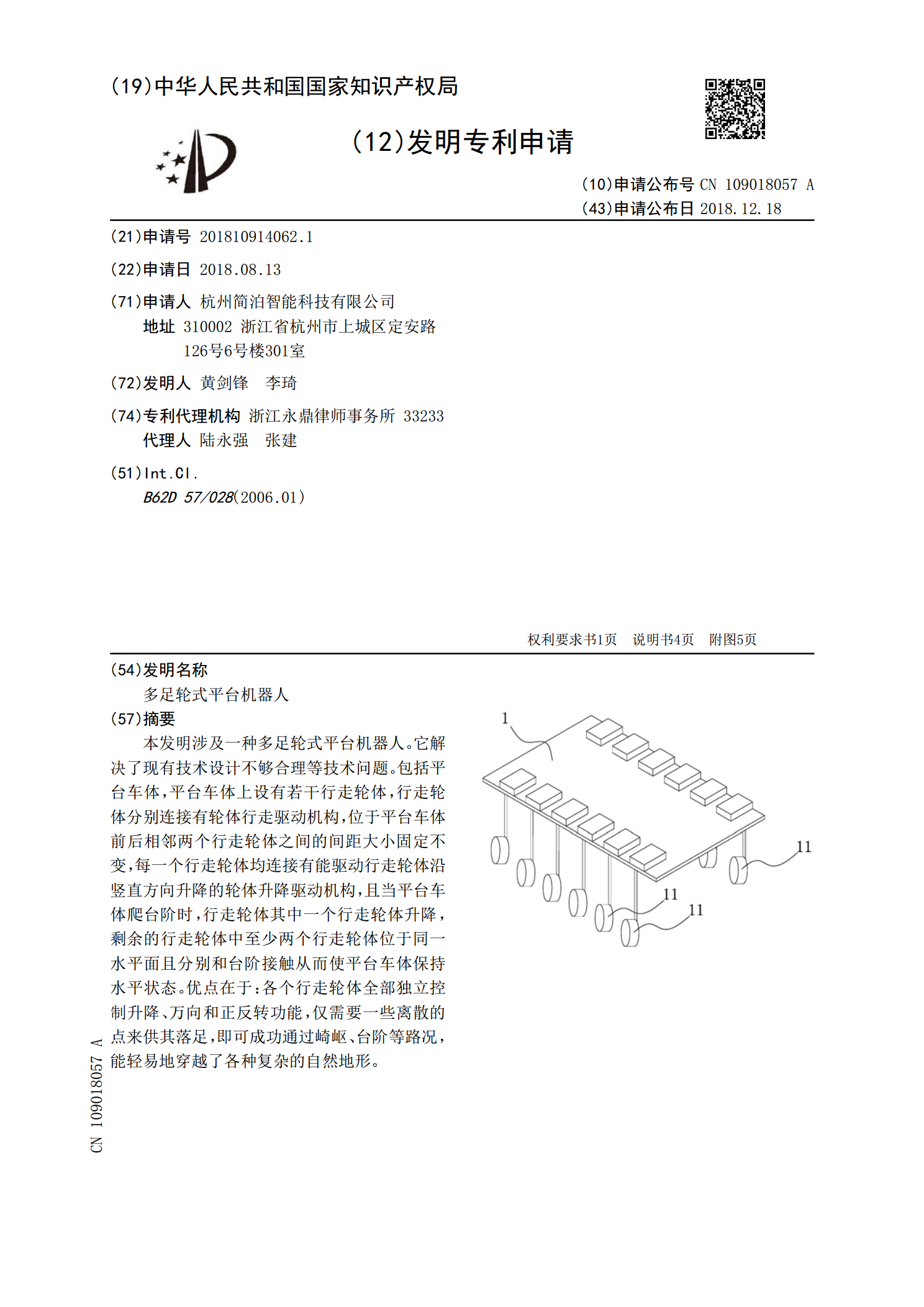
本发明涉及一种多足轮式平台机器人。它解决了现有技术设计不够合理等技术问题。包括平台车体,平台车体上设有若干行走轮体,行走轮体分别连接有轮体行走驱动机构,位于平台车体前后相邻两个行走轮体之间的间距大小固定不变,每一个行走轮体均连接有能驱动行走轮体沿竖直方向升降的轮体升降驱动机构,且当平台车体爬台阶时,行走轮体其中一个行走轮体升降,剩余的行走轮体中至少两个行走轮体位于同一水平面且分别和台阶接触从而使平台车体保持水平状态。优点在于:各个行走轮体全部独立控制升降、万向和正反转功能,仅需要一些离散的点来供其落足,即

轮式升降型双足轮式机器人.pdf
本发明提供一种轮式升降型双足轮式运动机构,包括底盘与滚轮,其特征在于:所述滚轮嵌置于底盘内部,底盘内设置升降通道;所述滚轮与升降机构连接,在升降机构的带动下,滚轮沿底盘内的升降通道下降伸出底盘下部或上升至底盘内部,实现足式与轮式切换。采用双足轮式运动机构的机器人的双足步行移动方式,具有很高的灵活性,轮式移动方式,在平坦路面具有移动速度快、稳定性好的优点,而且能够实现在双足步行与轮式移动两种移动形式之间平稳切换,轮式方式与足式方式互不影响,大大提高了机器人的环境适应性和工作效率。
一种多足机器人教学平台.pdf
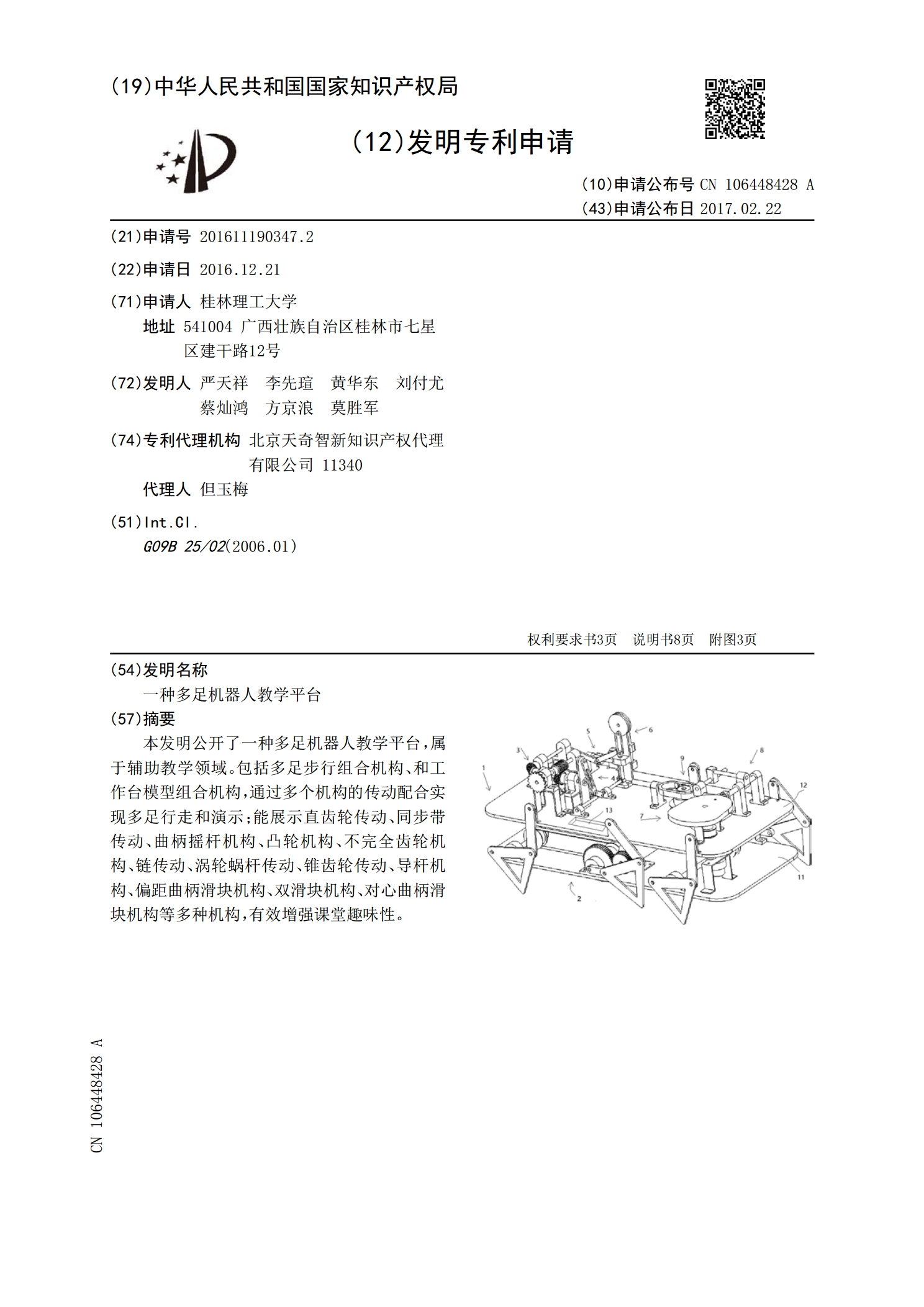
本发明公开了一种多足机器人教学平台,属于辅助教学领域。包括多足步行组合机构、和工作台模型组合机构,通过多个机构的传动配合实现多足行走和演示;能展示直齿轮传动、同步带传动、曲柄摇杆机构、凸轮机构、不完全齿轮机构、链传动、涡轮蜗杆传动、锥齿轮传动、导杆机构、偏距曲柄滑块机构、双滑块机构、对心曲柄滑块机构等多种机构,有效增强课堂趣味性。

多轮式移动平台.pdf
本发明公开了一种多轮式移动平台,包括车架,车架上装设有至少两对轮式行走机构,轮式行走机构包括主销、转向节臂和车轮,主销和转向节臂安装在车轮内侧,每对轮式行走机构对称布置在车架的两侧,轮式行走机构与车架之间装设有主动悬架,轮式行走机构与车架之间通过主动悬架连接,还包括至少两组轮距变化组件,每组轮距变化组件与一对轮式行走机构上的两个主动悬架相连接。本发明具有结构简单、可根据路面情况进行底盘调整进而提高车辆整体机动能力的优点。

攻击型四足轮式机器人.pdf
本发明的攻击型四足轮式机器人,包括支撑板、电路板、四个支腿,特征在于:每个支腿均由旋转舵机、摆动舵机、直流电机和车轮组成,旋转舵机的输出轴沿竖向方向固定于支撑板上,摆动舵机的壳体与旋转舵机的壳体相固定,摆动舵机的输出轴沿支撑板的纵向方向,直流电机的输出轴沿支撑板的横向方向,直流电机经U形支架与摆动舵机的输出轴相固定,车轮固定于直流电机的输出轴上;支撑板上设置有电磁炮和供电电容。本发明的机器人,对直流电机控制,可实现机器人快速的前进、后退、转弯、原地旋转,对摆动舵机、旋转舵机的控制,可实现机器人的四足行走,