
一种双平台四点支撑快速调平系统及其调平方法.pdf

是秋****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双平台四点支撑快速调平系统及其调平方法.pdf
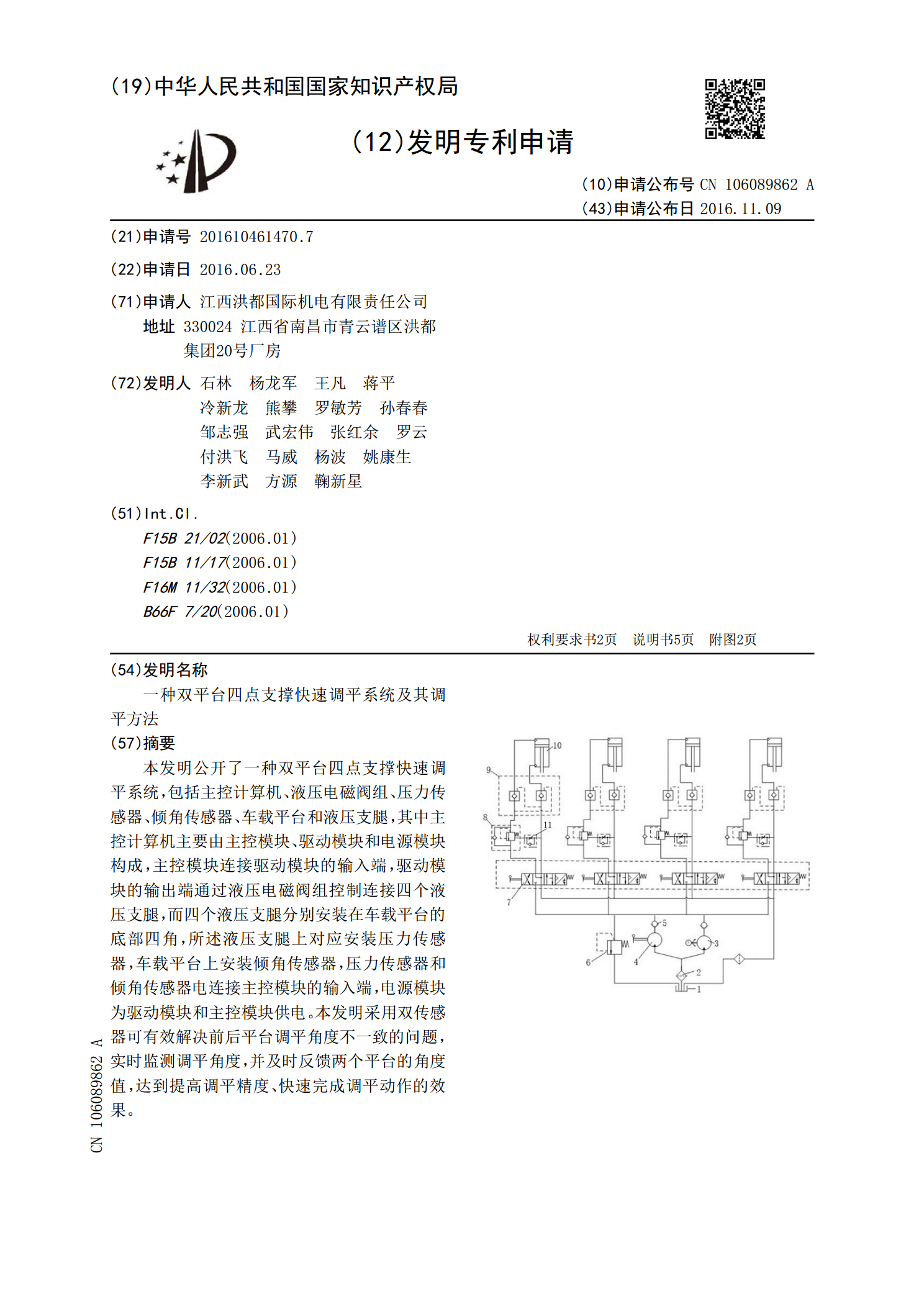
本发明公开了一种双平台四点支撑快速调平系统,包括主控计算机、液压电磁阀组、压力传感器、倾角传感器、车载平台和液压支腿,其中主控计算机主要由主控模块、驱动模块和电源模块构成,主控模块连接驱动模块的输入端,驱动模块的输出端通过液压电磁阀组控制连接四个液压支腿,而四个液压支腿分别安装在车载平台的底部四角,所述液压支腿上对应安装压力传感器,车载平台上安装倾角传感器,压力传感器和倾角传感器电连接主控模块的输入端,电源模块为驱动模块和主控模块供电。本发明采用双传感器可有效解决前后平台调平角度不一致的问题,实时监测调平

一种可快速调平的地板系统及其调平方法.pdf
本发明提供了一种可快速调平的地板系统及其调平方法,所述地板系统,包括地板、承载件和基底托盘;所述承载件呈矩阵排列设置,承载件的底部支撑于地面,所述基底托盘支撑架设于承载件之间,所述地板可拆卸连接于承载件上方;所述承载件包括支脚、承载主体和中心柱;所述中心柱贯穿设置于承载主体中,中心柱与承载主体可转动地铆接,中心柱的下端露出于承载主体的下端面,中心柱的上端露出于承载主体的上端面;中心柱的上端面设置有螺槽,中心柱的下端开设有螺纹孔;所述支脚包括支撑部和位于支撑部上方的螺纹柱;所述支脚的螺纹柱螺纹连接于中心柱的
一种方舱自动支撑调平系统及其调平方法.pdf
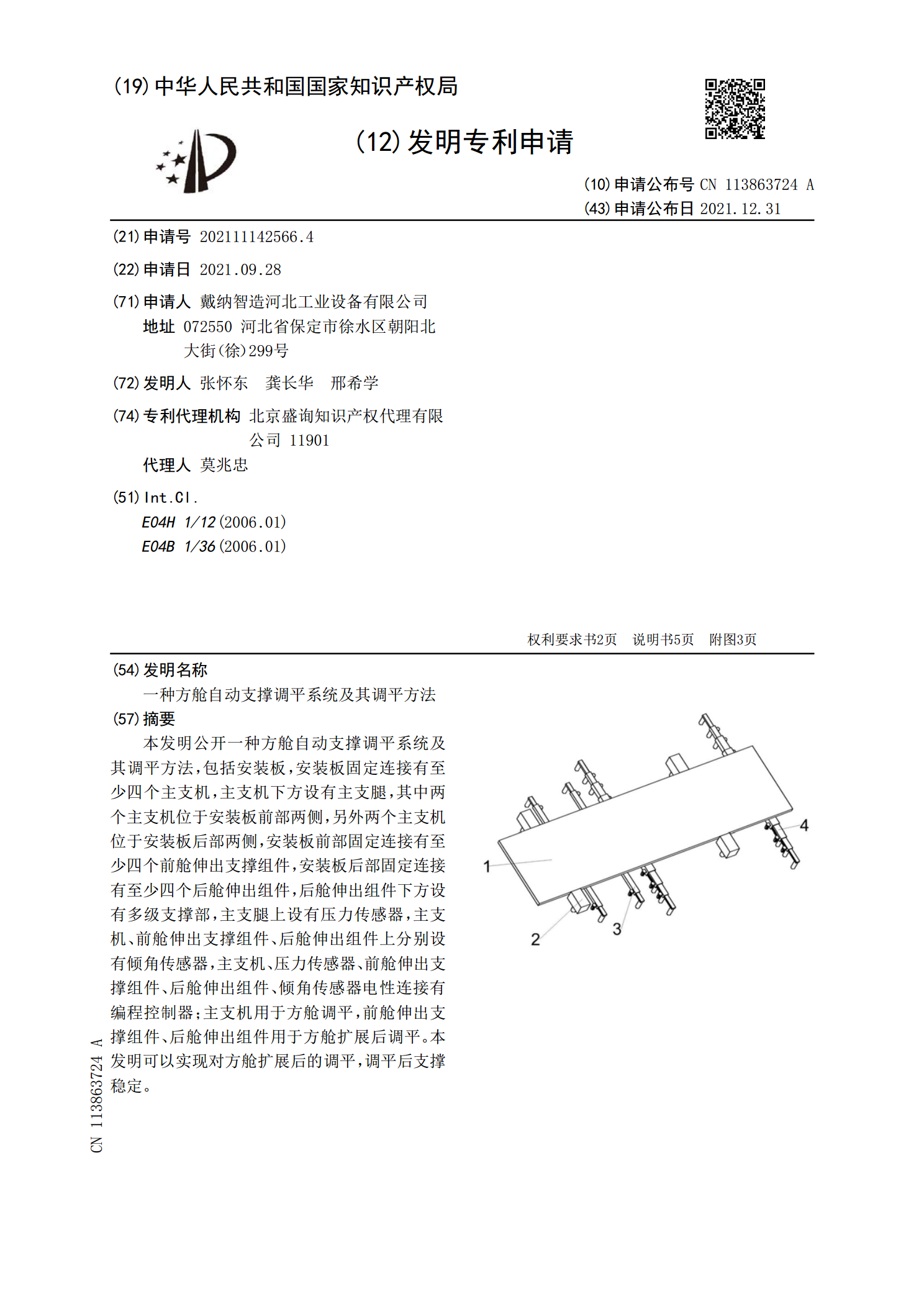
本发明公开一种方舱自动支撑调平系统及其调平方法,包括安装板,安装板固定连接有至少四个主支机,主支机下方设有主支腿,其中两个主支机位于安装板前部两侧,另外两个主支机位于安装板后部两侧,安装板前部固定连接有至少四个前舱伸出支撑组件,安装板后部固定连接有至少四个后舱伸出组件,后舱伸出组件下方设有多级支撑部,主支腿上设有压力传感器,主支机、前舱伸出支撑组件、后舱伸出组件上分别设有倾角传感器,主支机、压力传感器、前舱伸出支撑组件、后舱伸出组件、倾角传感器电性连接有编程控制器;主支机用于方舱调平,前舱伸出支撑组件、后
一种多点支撑平台的调平控制方法.pdf
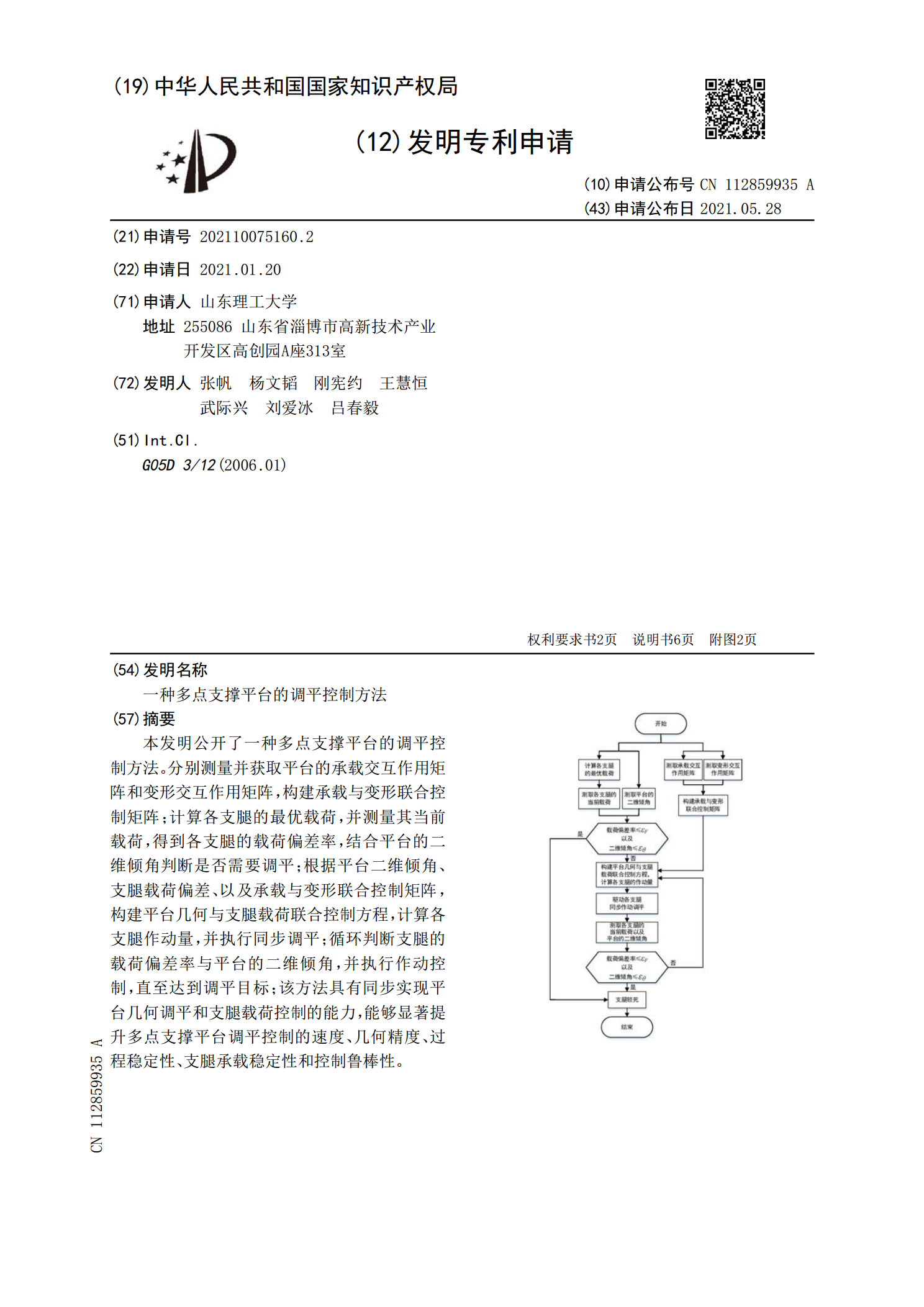
本发明公开了一种多点支撑平台的调平控制方法。分别测量并获取平台的承载交互作用矩阵和变形交互作用矩阵,构建承载与变形联合控制矩阵;计算各支腿的最优载荷,并测量其当前载荷,得到各支腿的载荷偏差率,结合平台的二维倾角判断是否需要调平;根据平台二维倾角、支腿载荷偏差、以及承载与变形联合控制矩阵,构建平台几何与支腿载荷联合控制方程,计算各支腿作动量,并执行同步调平;循环判断支腿的载荷偏差率与平台的二维倾角,并执行作动控制,直至达到调平目标;该方法具有同步实现平台几何调平和支腿载荷控制的能力,能够显著提升多点支撑平台
平台调平系统和方法.pdf
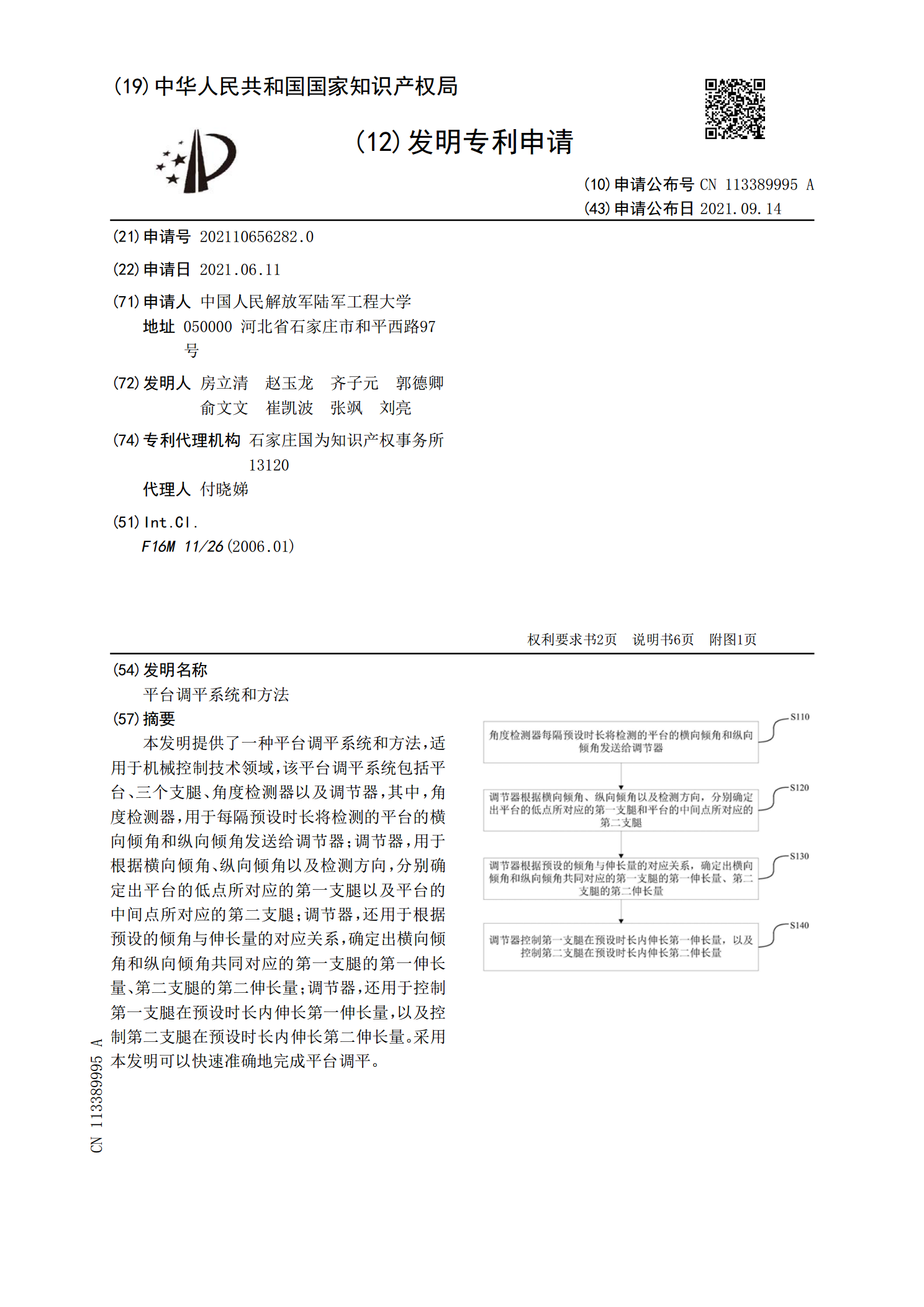
本发明提供了一种平台调平系统和方法,适用于机械控制技术领域,该平台调平系统包括平台、三个支腿、角度检测器以及调节器,其中,角度检测器,用于每隔预设时长将检测的平台的横向倾角和纵向倾角发送给调节器;调节器,用于根据横向倾角、纵向倾角以及检测方向,分别确定出平台的低点所对应的第一支腿以及平台的中间点所对应的第二支腿;调节器,还用于根据预设的倾角与伸长量的对应关系,确定出横向倾角和纵向倾角共同对应的第一支腿的第一伸长量、第二支腿的第二伸长量;调节器,还用于控制第一支腿在预设时长内伸长第一伸长量,以及控制第二支腿