
一种预弯电极自动植入机器人.pdf

一吃****春艳


1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种预弯电极自动植入机器人.pdf
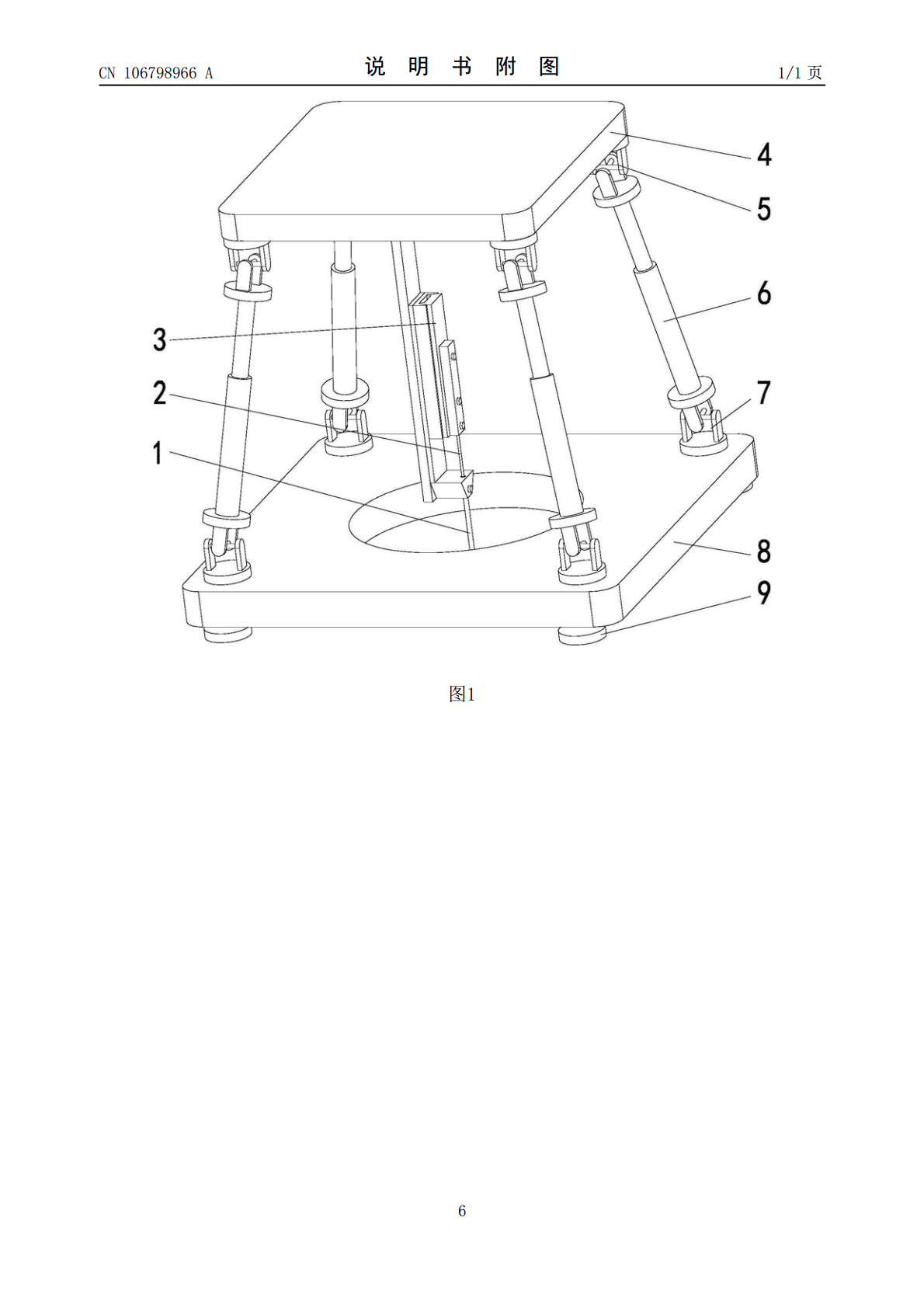
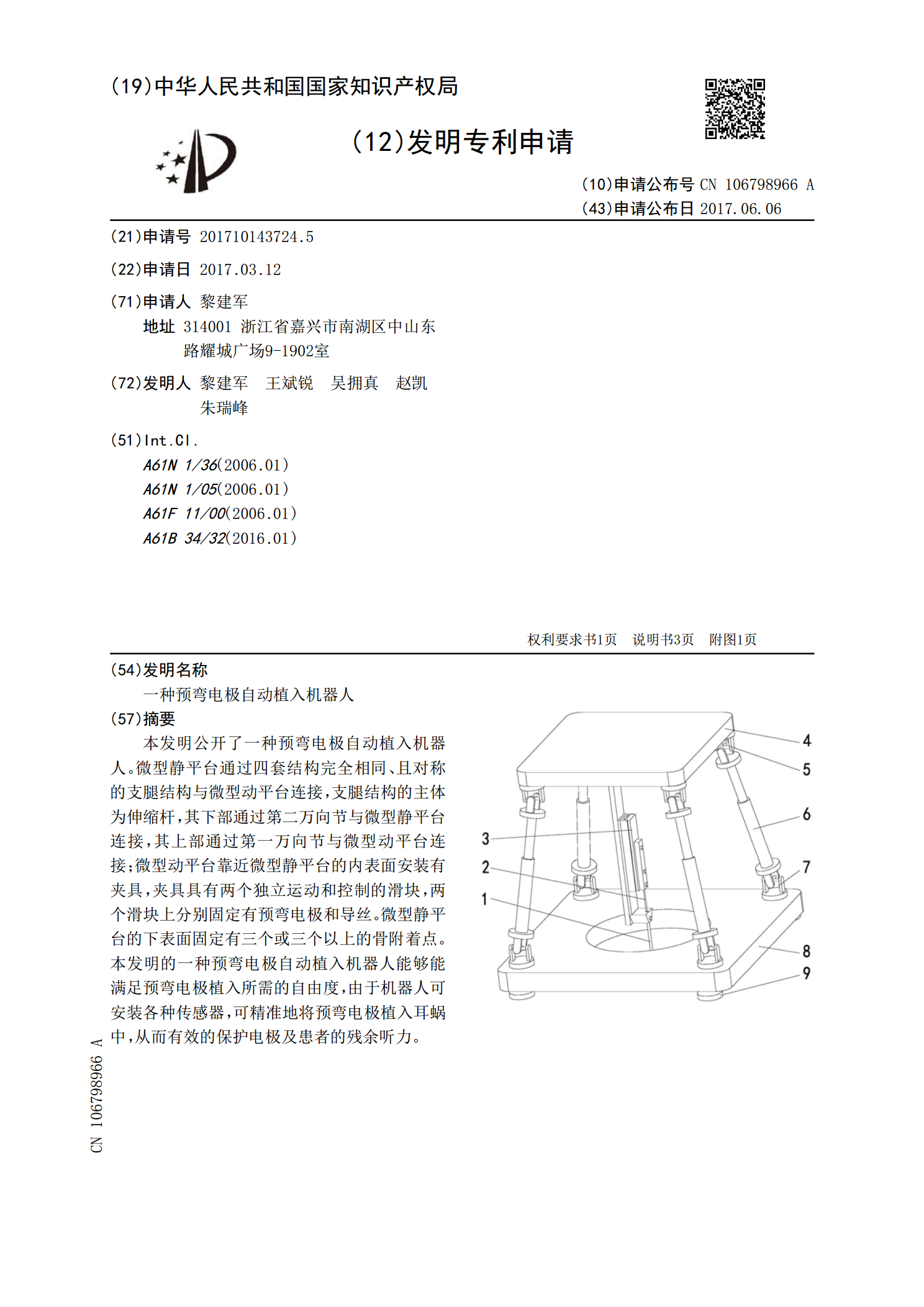
本发明公开了一种预弯电极自动植入机器人。微型静平台通过四套结构完全相同、且对称的支腿结构与微型动平台连接,支腿结构的主体为伸缩杆,其下部通过第二万向节与微型静平台连接,其上部通过第一万向节与微型动平台连接;微型动平台靠近微型静平台的内表面安装有夹具,夹具具有两个独立运动和控制的滑块,两个滑块上分别固定有预弯电极和导丝。微型静平台的下表面固定有三个或三个以上的骨附着点。本发明的一种预弯电极自动植入机器人能够能满足预弯电极植入所需的自由度,由于机器人可安装各种传感器,可精准地将预弯电极植入耳蜗中,从而有效的保
一种电极植入工具.pdf
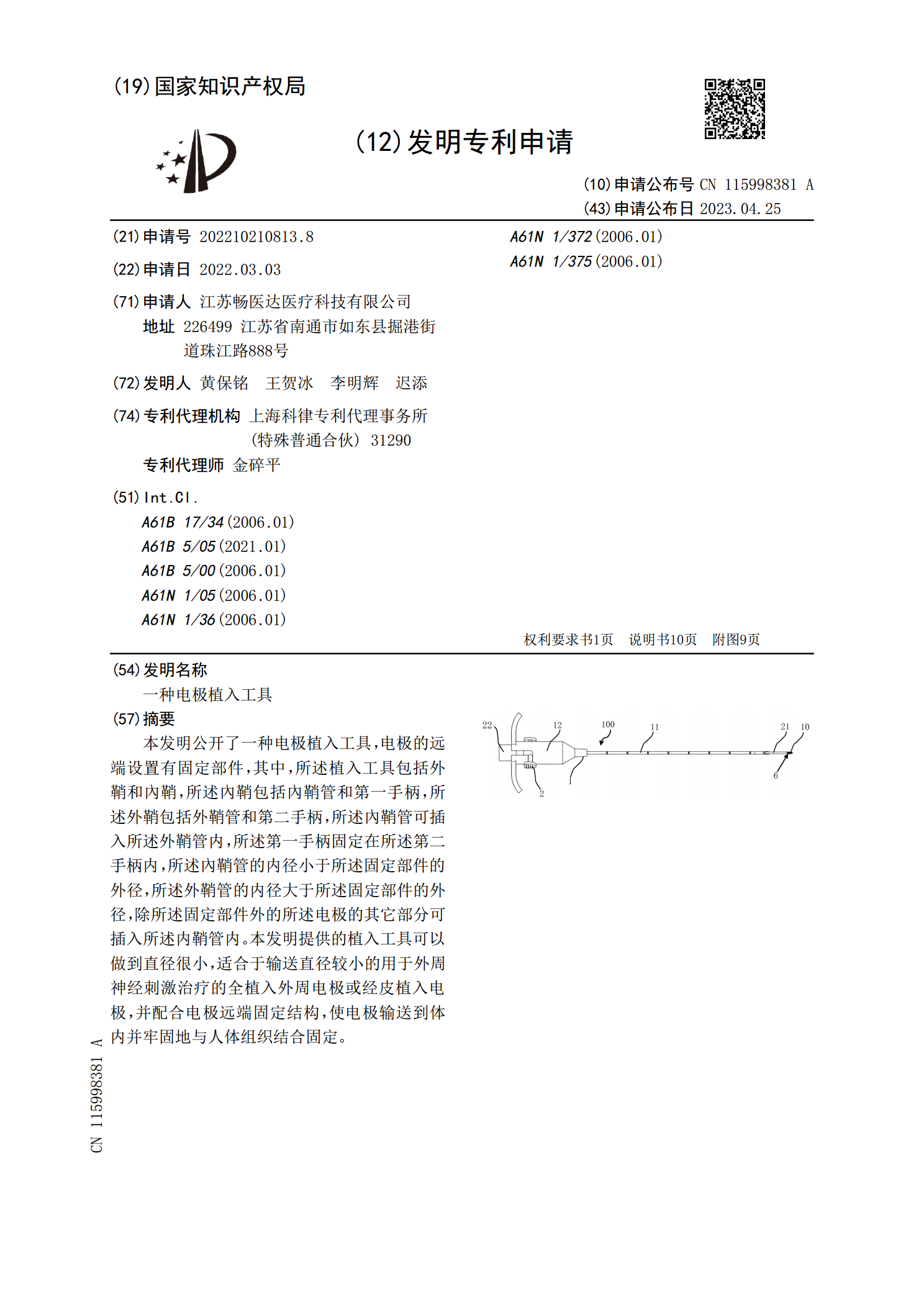
本发明公开了一种电极植入工具,电极的远端设置有固定部件,其中,所述植入工具包括外鞘和內鞘,所述內鞘包括內鞘管和第一手柄,所述外鞘包括外鞘管和第二手柄,所述內鞘管可插入所述外鞘管内,所述第一手柄固定在所述第二手柄内,所述內鞘管的内径小于所述固定部件的外径,所述外鞘管的内径大于所述固定部件的外径,除所述固定部件外的所述电极的其它部分可插入所述内鞘管内。本发明提供的植入工具可以做到直径很小,适合于输送直径较小的用于外周神经刺激治疗的全植入外周电极或经皮植入电极,并配合电极远端固定结构,使电极输送到体内并牢固地与
一种预弯和成型半自动合页生产装置.pdf
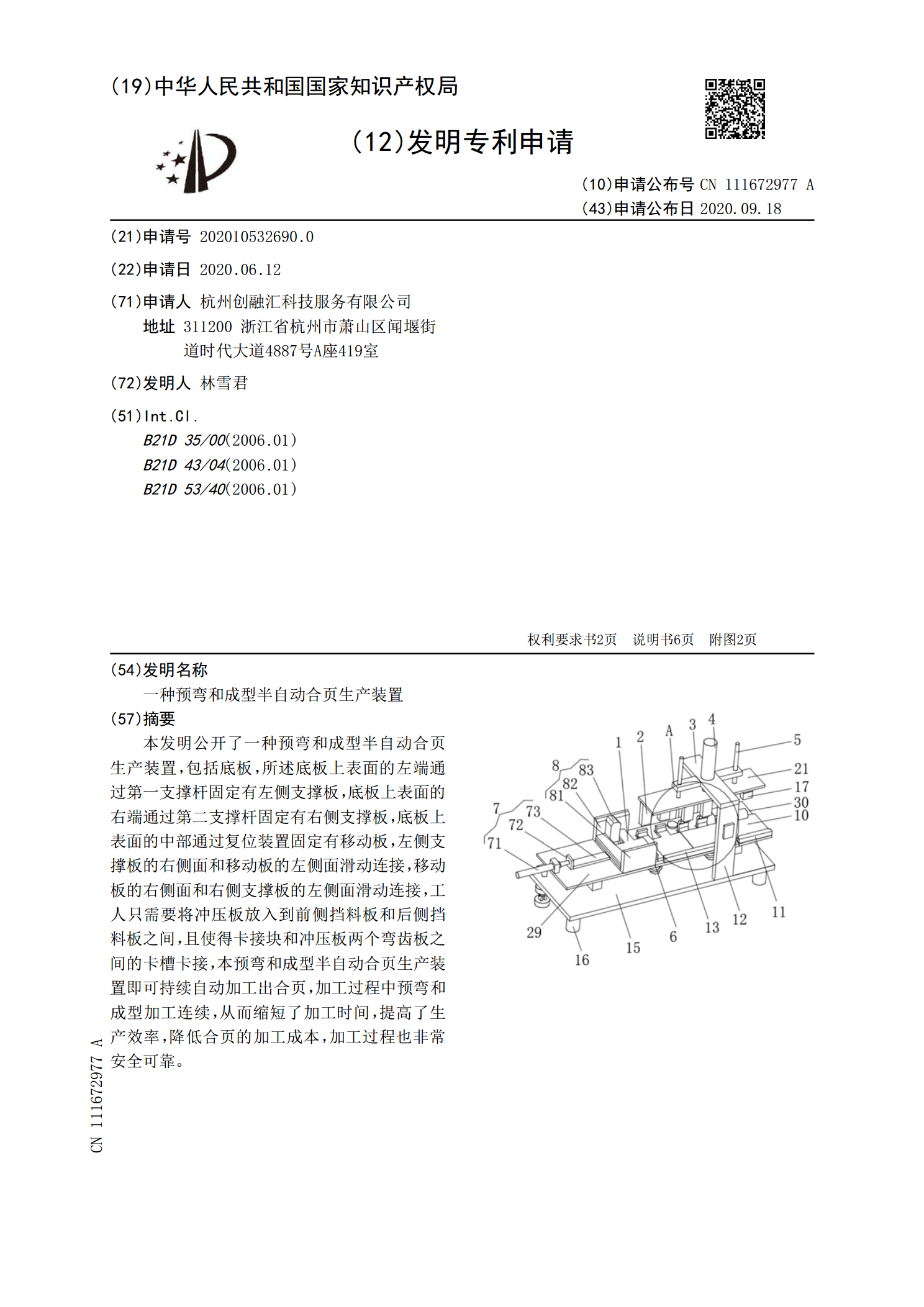
本发明公开了一种预弯和成型半自动合页生产装置,包括底板,所述底板上表面的左端通过第一支撑杆固定有左侧支撑板,底板上表面的右端通过第二支撑杆固定有右侧支撑板,底板上表面的中部通过复位装置固定有移动板,左侧支撑板的右侧面和移动板的左侧面滑动连接,移动板的右侧面和右侧支撑板的左侧面滑动连接,工人只需要将冲压板放入到前侧挡料板和后侧挡料板之间,且使得卡接块和冲压板两个弯齿板之间的卡槽卡接,本预弯和成型半自动合页生产装置即可持续自动加工出合页,加工过程中预弯和成型加工连续,从而缩短了加工时间,提高了生产效率,降低合
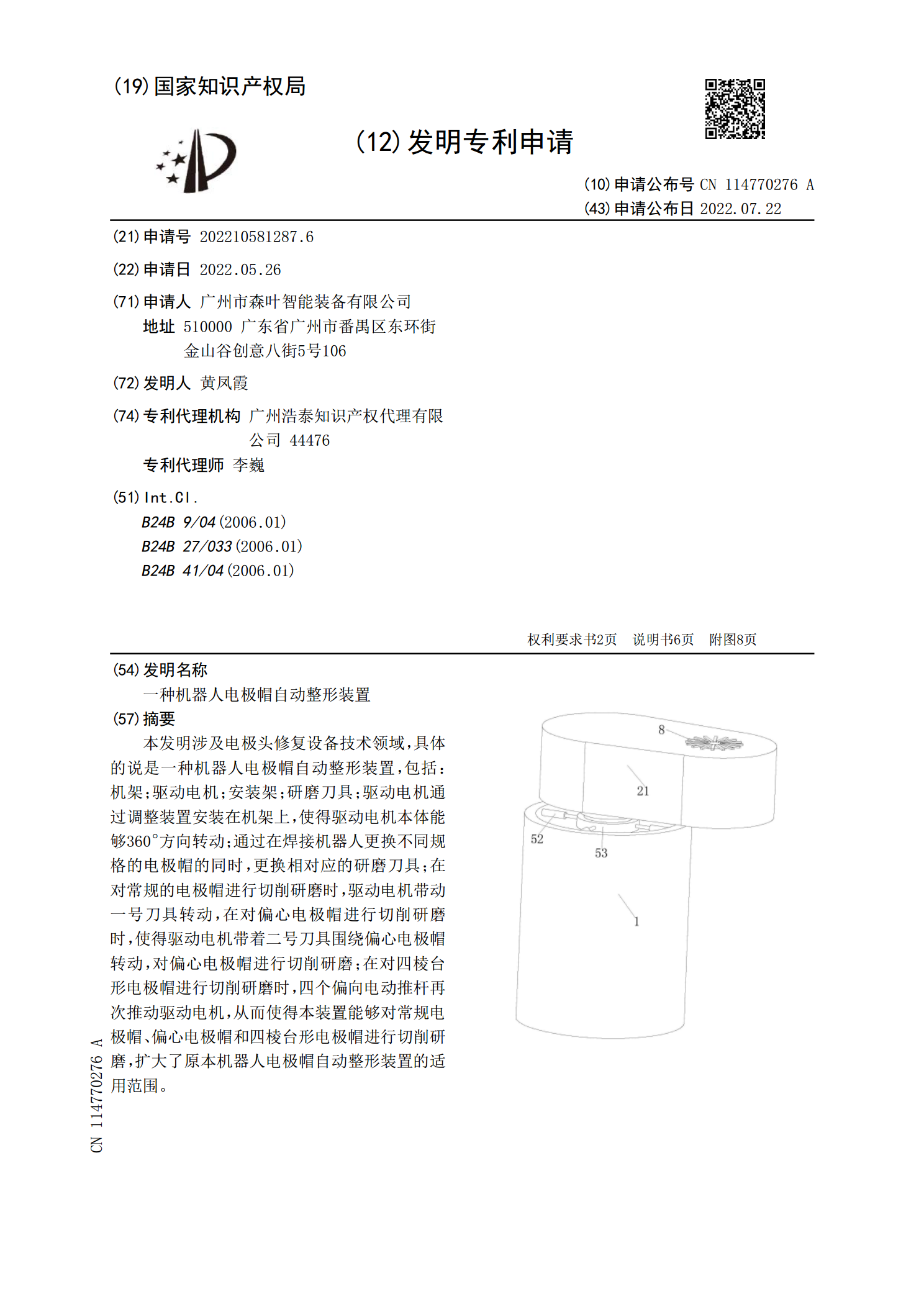
一种机器人电极帽自动整形装置.pdf
本发明涉及电极头修复设备技术领域,具体的说是一种机器人电极帽自动整形装置,包括:机架;驱动电机;安装架;研磨刀具;驱动电机通过调整装置安装在机架上,使得驱动电机本体能够360°方向转动;通过在焊接机器人更换不同规格的电极帽的同时,更换相对应的研磨刀具;在对常规的电极帽进行切削研磨时,驱动电机带动一号刀具转动,在对偏心电极帽进行切削研磨时,使得驱动电机带着二号刀具围绕偏心电极帽转动,对偏心电极帽进行切削研磨;在对四棱台形电极帽进行切削研磨时,四个偏向电动推杆再次推动驱动电机,从而使得本装置能够对常规电极帽、
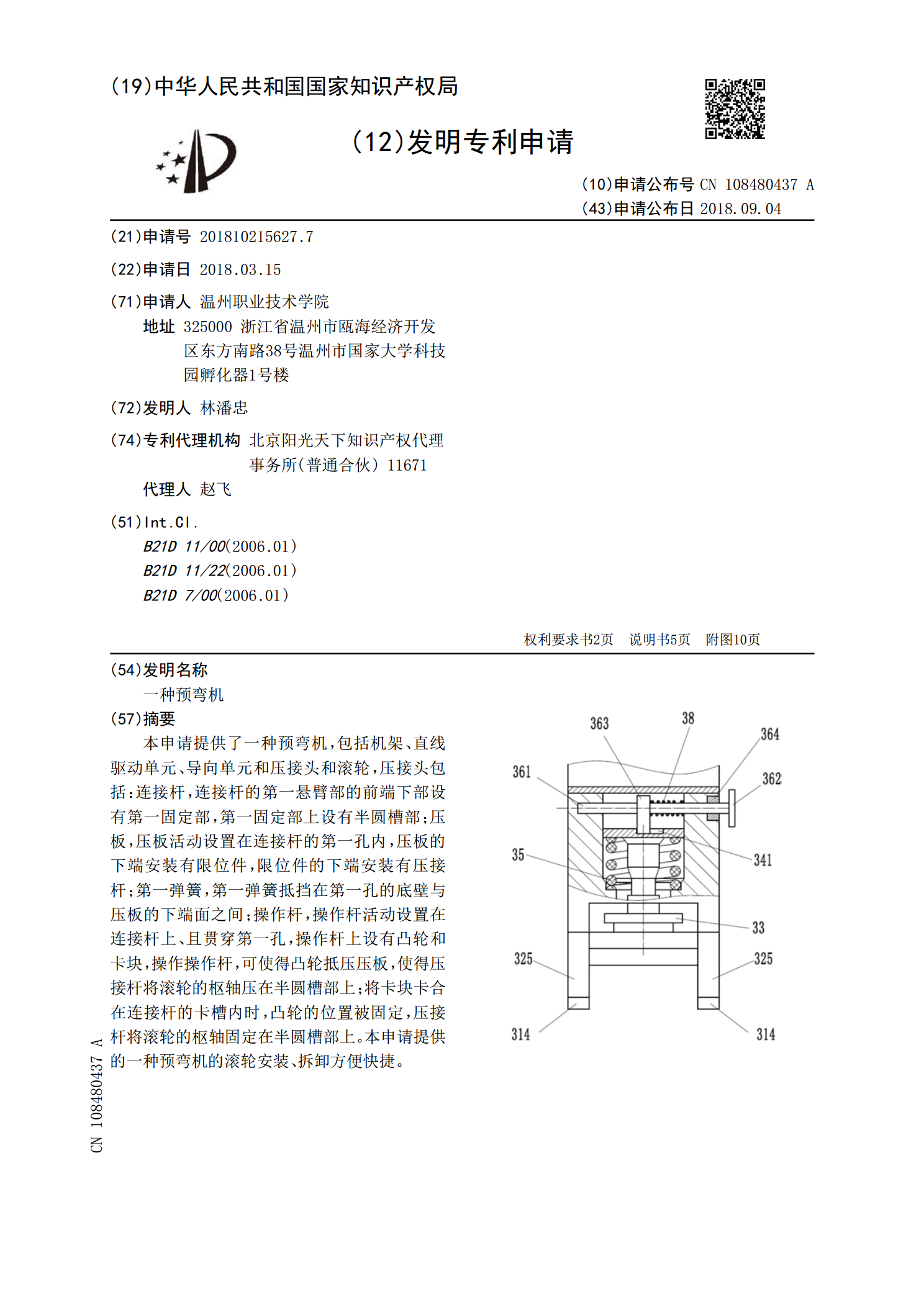
一种预弯机.pdf
本申请提供了一种预弯机,包括机架、直线驱动单元、导向单元和压接头和滚轮,压接头包括:连接杆,连接杆的第一悬臂部的前端下部设有第一固定部,第一固定部上设有半圆槽部;压板,压板活动设置在连接杆的第一孔内,压板的下端安装有限位件,限位件的下端安装有压接杆;第一弹簧,第一弹簧抵挡在第一孔的底壁与压板的下端面之间;操作杆,操作杆活动设置在连接杆上、且贯穿第一孔,操作杆上设有凸轮和卡块,操作操作杆,可使得凸轮抵压压板,使得压接杆将滚轮的枢轴压在半圆槽部上;将卡块卡合在连接杆的卡槽内时,凸轮的位置被固定,压接杆将滚轮的