
一种机器人行走装置.pdf

星菱****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种导线行走机器人的行走装置.pdf
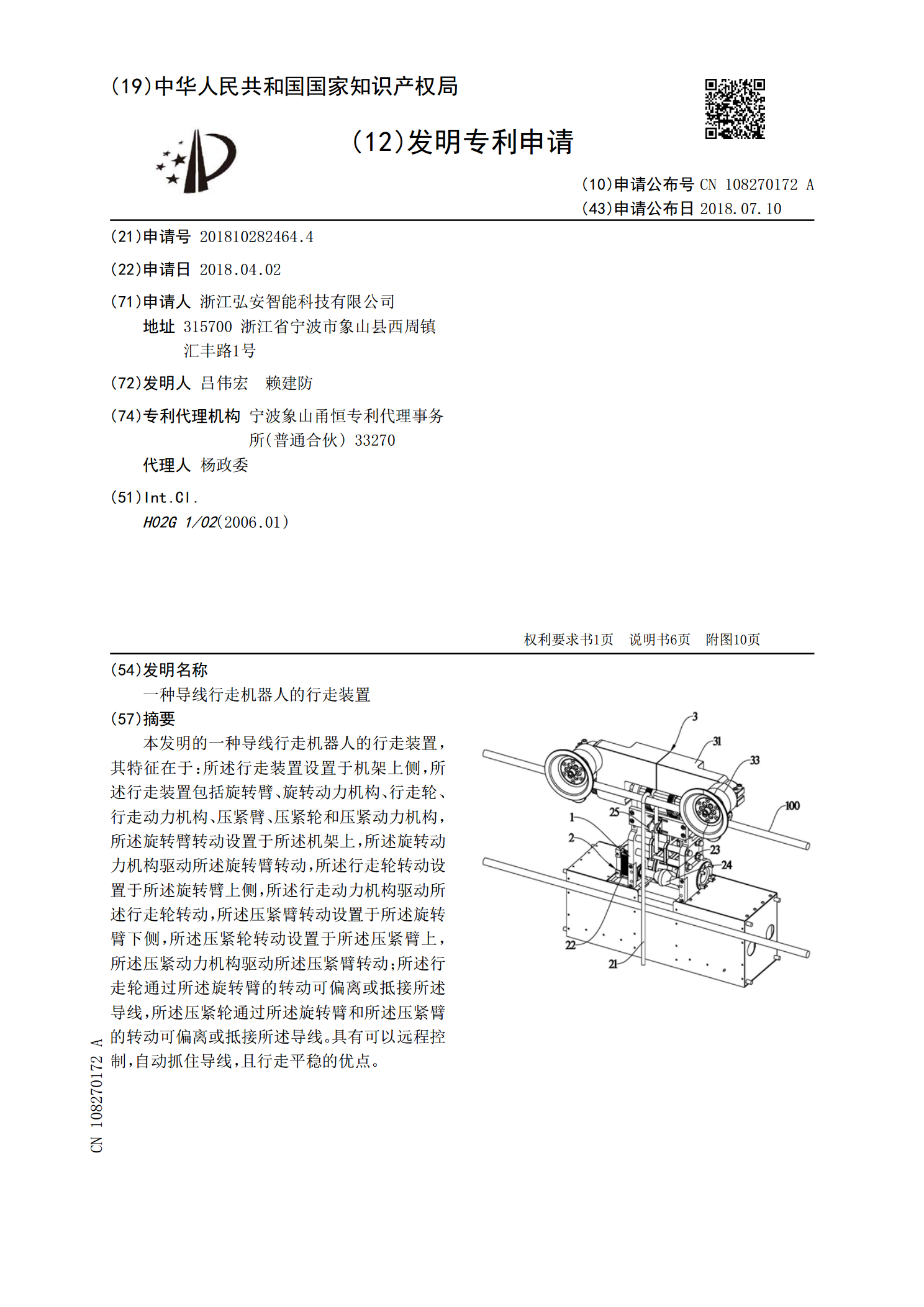
本发明的一种导线行走机器人的行走装置,其特征在于:所述行走装置设置于机架上侧,所述行走装置包括旋转臂、旋转动力机构、行走轮、行走动力机构、压紧臂、压紧轮和压紧动力机构,所述旋转臂转动设置于所述机架上,所述旋转动力机构驱动所述旋转臂转动,所述行走轮转动设置于所述旋转臂上侧,所述行走动力机构驱动所述行走轮转动,所述压紧臂转动设置于所述旋转臂下侧,所述压紧轮转动设置于所述压紧臂上,所述压紧动力机构驱动所述压紧臂转动;所述行走轮通过所述旋转臂的转动可偏离或抵接所述导线,所述压紧轮通过所述旋转臂和所述压紧臂的转动可

一种机器人行走装置.pdf
本发明公开了一种机器人行走装置。本发明的机器人行走装置包括:驱动轮组件,后摆动轴组件,万向轮摆动组件以及第一万向轮;所述驱动轮组件,后摆动轴组件及第一万向轮安装在机器人本体的底部;所述万向轮摆动组件安装在所述后摆动轴组件的摆动面上;所述驱动轮组件为所述机器人行走装置提供动力;所述万向轮摆动组件与第一万向轮支撑机器人行走装置整体运动。本发明提供的机器人行走装置能使证机器人行走装置的六个轮都与地面接触,从而行走的精度更高。
一种机器人行走装置.pdf
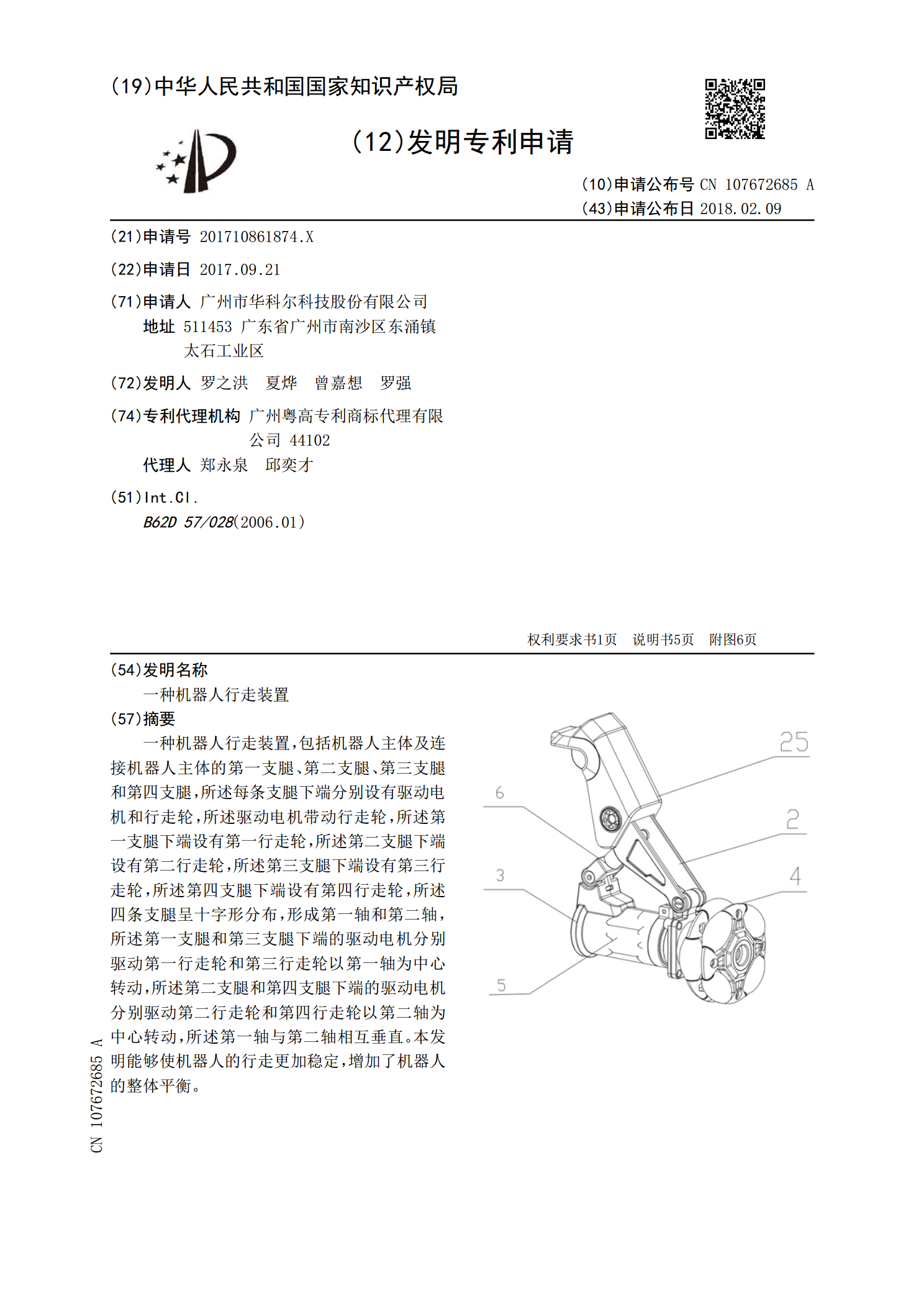
一种机器人行走装置,包括机器人主体及连接机器人主体的第一支腿、第二支腿、第三支腿和第四支腿,所述每条支腿下端分别设有驱动电机和行走轮,所述驱动电机带动行走轮,所述第一支腿下端设有第一行走轮,所述第二支腿下端设有第二行走轮,所述第三支腿下端设有第三行走轮,所述第四支腿下端设有第四行走轮,所述四条支腿呈十字形分布,形成第一轴和第二轴,所述第一支腿和第三支腿下端的驱动电机分别驱动第一行走轮和第三行走轮以第一轴为中心转动,所述第二支腿和第四支腿下端的驱动电机分别驱动第二行走轮和第四行走轮以第二轴为中心转动,所述第

一种机器人行走装置.pdf
本发明公开了一种机器人行走装置,包括支撑框架、联动机构和行走机构,所述联动机构安装于支撑框架上,所述行走机构安装于联动机构上;所述支撑框架包括支撑底板和盖板,所述支撑底板的上表面开有第一环形槽和第二环形槽;所述支撑底板的上表面安装有主动轴杆,所述支撑底板的上表面固定有从动轴杆;所述联动机构包括齿轮机构、齿圈轮和蜗杆,所述齿轮机构和齿圈轮均安装于支撑底板上,所述蜗杆安装于侧板上;所述行走机构包括对称设置于两块侧板外侧的行走支架。本发明的结构简单、易于操作,通过齿轮的啮合传动、连杆机制的应用,实现行走,通过一

一种管道机器人的行走装置.pdf
本发明公开了一种管道机器人的行走装置,包括:前支撑结构、驱动结构、后支撑结构、滚轮结构、万向节和控制系统;所述前支撑结构与万向节连接,所述万向节与滚轮结构连接,所述滚轮结构与驱动结构连接;所述后支撑结构与前支撑结构相同,依次与万向节和滚轮结构连接后与驱动结构连接,所述前支撑结构、驱动结构和后支撑结构通过信号传输单元与控制系统连接;本发明支撑结构、驱动结构和后支撑结构均采用电机驱动丝杠螺母机构来实现机器人在管内的行走和支撑,其具有足够大的驱动牵引力、管径适应性和行走能力,在管道的两端设置不同清洁部件,能够满