
一种物料搬运机器人.pdf

是来****文章

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种物料搬运机器人.pdf
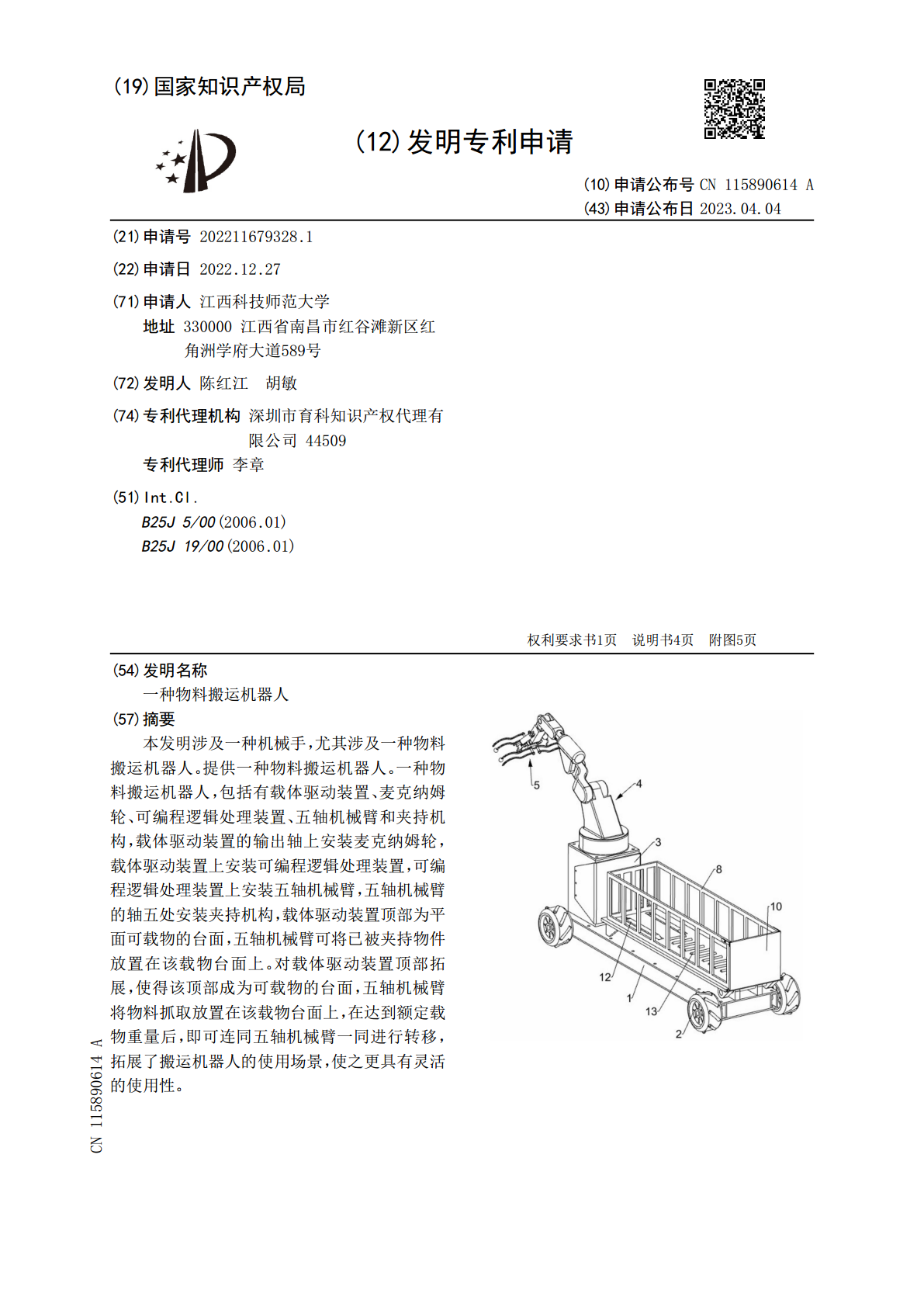
本发明涉及一种机械手,尤其涉及一种物料搬运机器人。提供一种物料搬运机器人。一种物料搬运机器人,包括有载体驱动装置、麦克纳姆轮、可编程逻辑处理装置、五轴机械臂和夹持机构,载体驱动装置的输出轴上安装麦克纳姆轮,载体驱动装置上安装可编程逻辑处理装置,可编程逻辑处理装置上安装五轴机械臂,五轴机械臂的轴五处安装夹持机构,载体驱动装置顶部为平面可载物的台面,五轴机械臂可将已被夹持物件放置在该载物台面上。对载体驱动装置顶部拓展,使得该顶部成为可载物的台面,五轴机械臂将物料抓取放置在该载物台面上,在达到额定载物重量后,即
一种物料搬运机器人.pdf
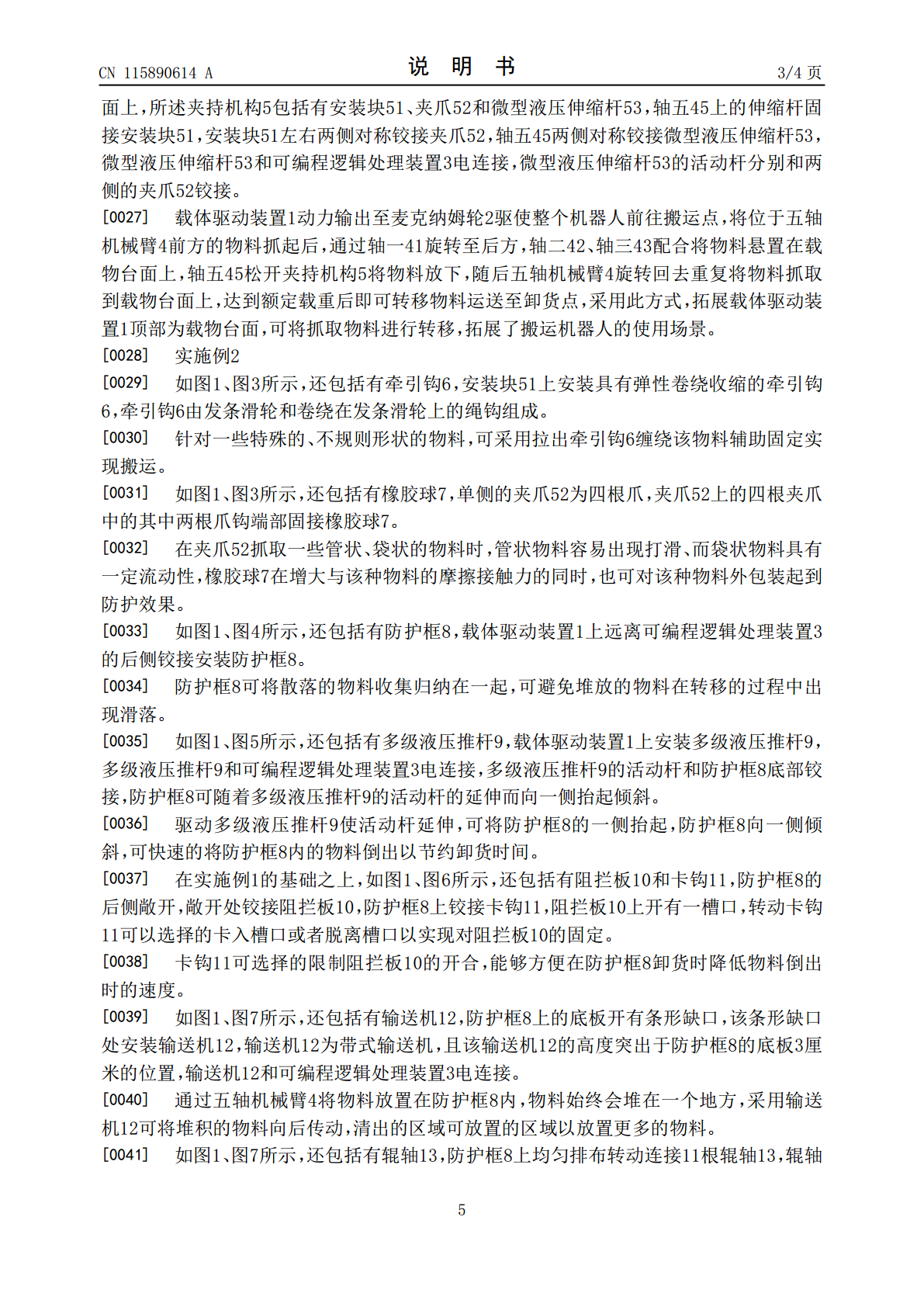
本发明公开了一种物料搬运机器人,属于物料搬运技术领域,解决了现有装置取放物料时倾斜角度不可调节的问题;其技术特征是:包括底座、升降组件和搬运机构,所述底座上固定安装有用于调节搬运机构高度的升降组件,所述搬运机构的左侧设有用于调节搬运机构倾斜角度的角度调节组件,所述底座的下部安装有多个用于移动底座的滚轮;本发明设置了升降组件,能够对处于不同高度的物料进行搬运,同时角度调节组件的设置进一步降低了物料搬运的难度,同时本发明实施例移动便捷,支撑稳定,保证了搬运工作的顺利进行,显著提高了搬运效率。

一种物料搬运码垛机器人.pdf
本发明涉及机器人技术领域,具体的说是一种物料搬运码垛机器人,包括机器人本体、底座、水平结构、标示结构、润滑结构、安装结构、搬运结构和螺栓;通过搬运结构搬运物料,保护了物料的表面包装,通过安装结构调整使搬运结构处于绝对水平位置,提高了搬运的效果,通过安装结构拆卸搬运结构,进而对搬运结构进行修理与更换;通过水平结构检测底座的水平度,同时通过水平结构给标示结构进行校准,使机器人本体的底端更加水平稳定,通过标示结构测量出机器人本体在底座上上下偏移的高度,进而保证了机器人本体处于水平状态,运转更稳定;通过润滑结构给
物料搬运机器人.pdf
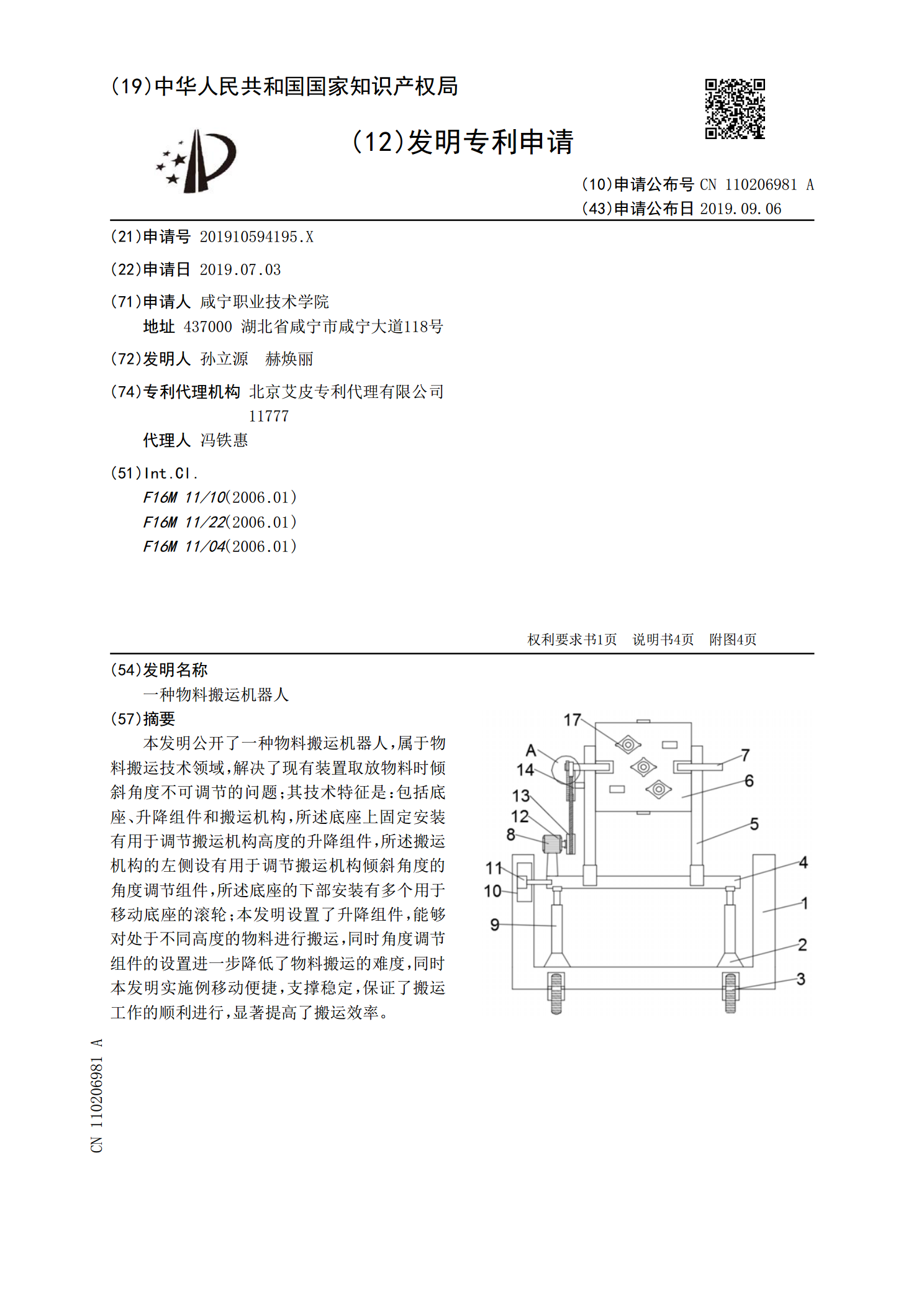
本发明公开了物料搬运机器人,包括:第一支座和第二支座,其固定且相对设置;滑动支座,其与第一支座和第二支座形成U型结构;移动箱体,其下部从上到下依次设置有贯通的第一通道和第二通道,所述第二通道内配合有卡合块;偏心轮,其位于移动箱体的上部;支撑柱,其恰好从移动箱体的上表面自由竖直穿进移动箱体内,且支撑柱的下端恰好配合于偏心轮的配合环槽内、上端稳定支撑物料;转动轴,其从第二凹槽中水平穿进第一支座和第二支座内;螺杆,其从第三凹槽中水平穿进第一支座和第二支座内,且所述螺杆两端分别通过轴承固定于第一支座和第二支座内,

一种工厂物料搬运用机器人.pdf
本发明涉及一种机器人,尤其涉及一种工厂物料搬运用机器人。本发明要解决的技术问题是提供一种搬运效率高和极具自主性的工厂物料搬运用机器人。为了解决上述技术问题,本发明提供了这样一种工厂物料搬运用机器人,包括有滚轮、底板、滑轨、滑块、放置板、左支架、机械手、连接杆、旋转电机、绕线轮、转轴、后挡板、右支架等;滚轮可转动,底板顶部左侧通过焊接的方式连接有左支架,底板顶部右侧通过焊接的方式连接有右支架。本发明达到了快速搬运工厂物料的效果,同时利用机器人搬运物料解决了人工搬运物料时费时费力和效率低的问题,同时利用机械手