
一种带有自动循迹功能的小型气动四足机器人.pdf

是雁****找我


1/8

2/8
3/8
4/8

5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种带有自动循迹功能的小型气动四足机器人.pdf
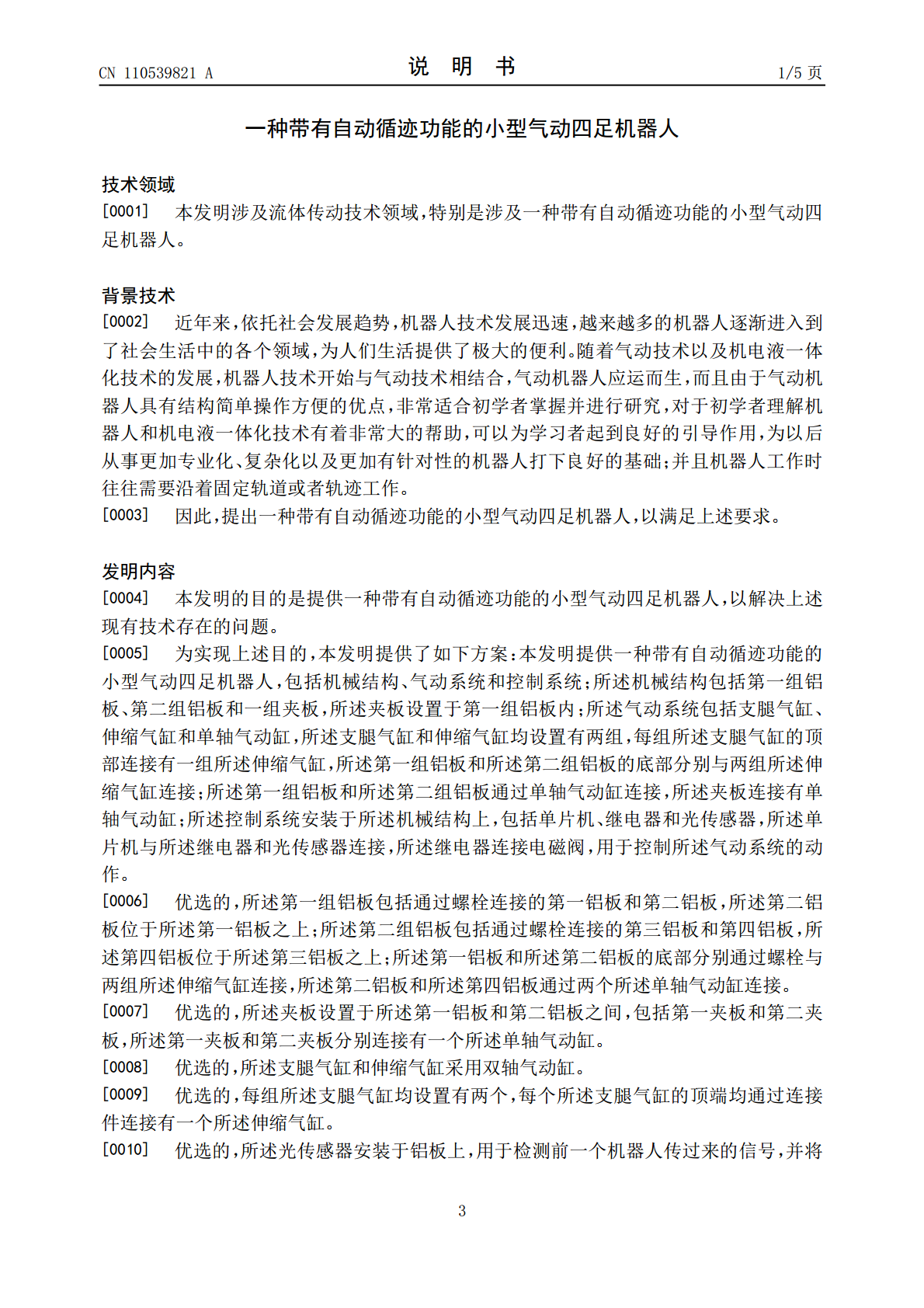
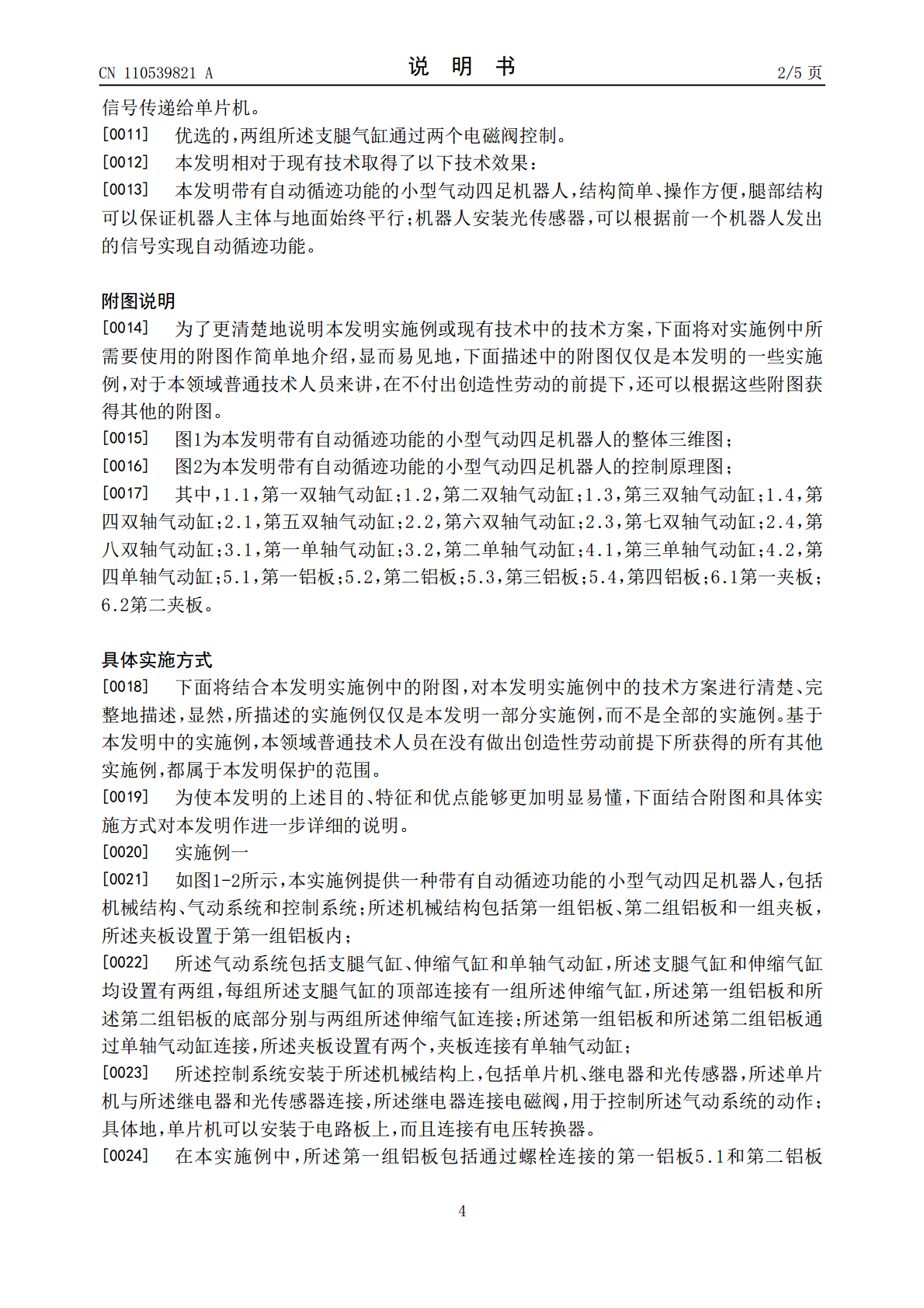
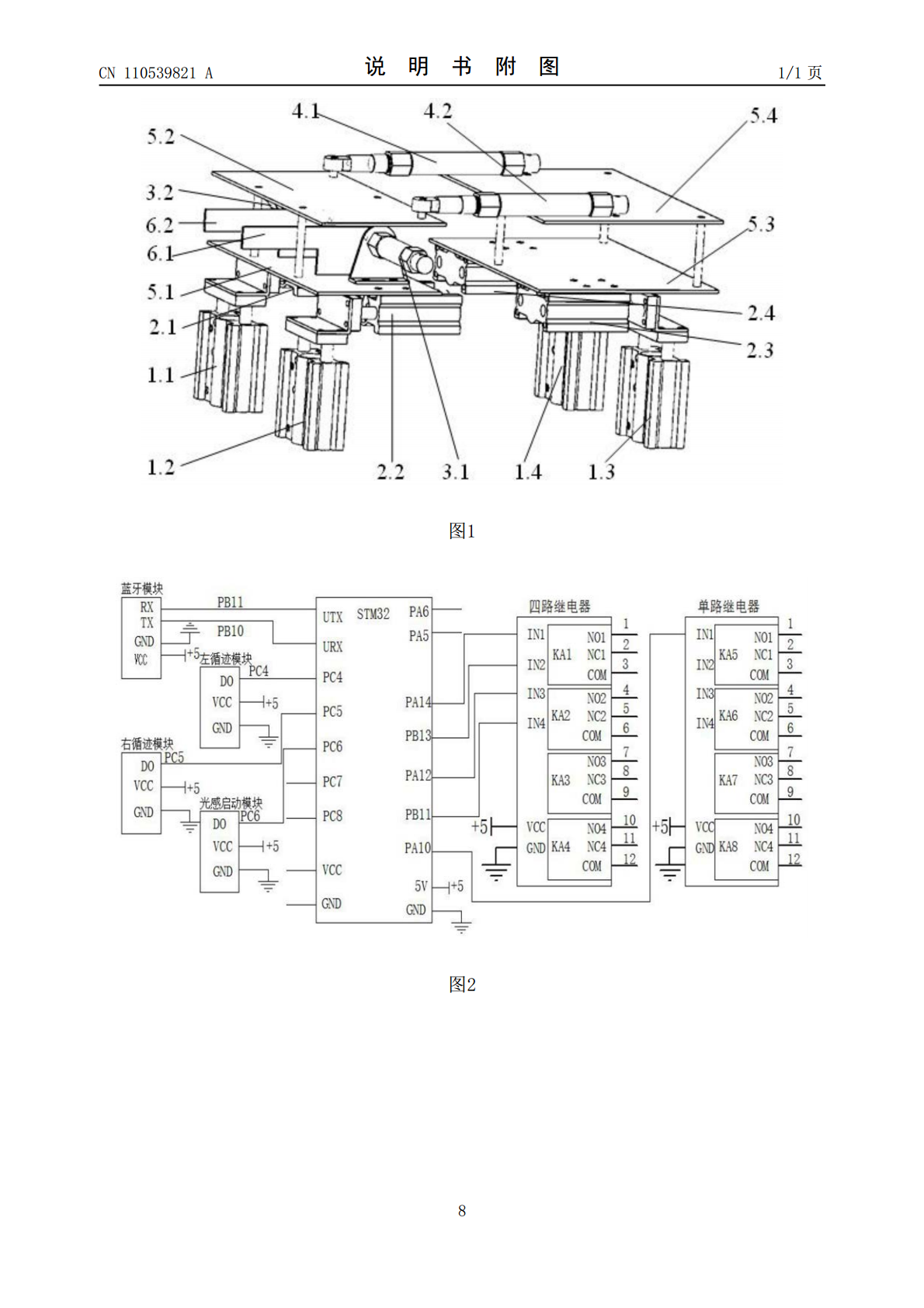
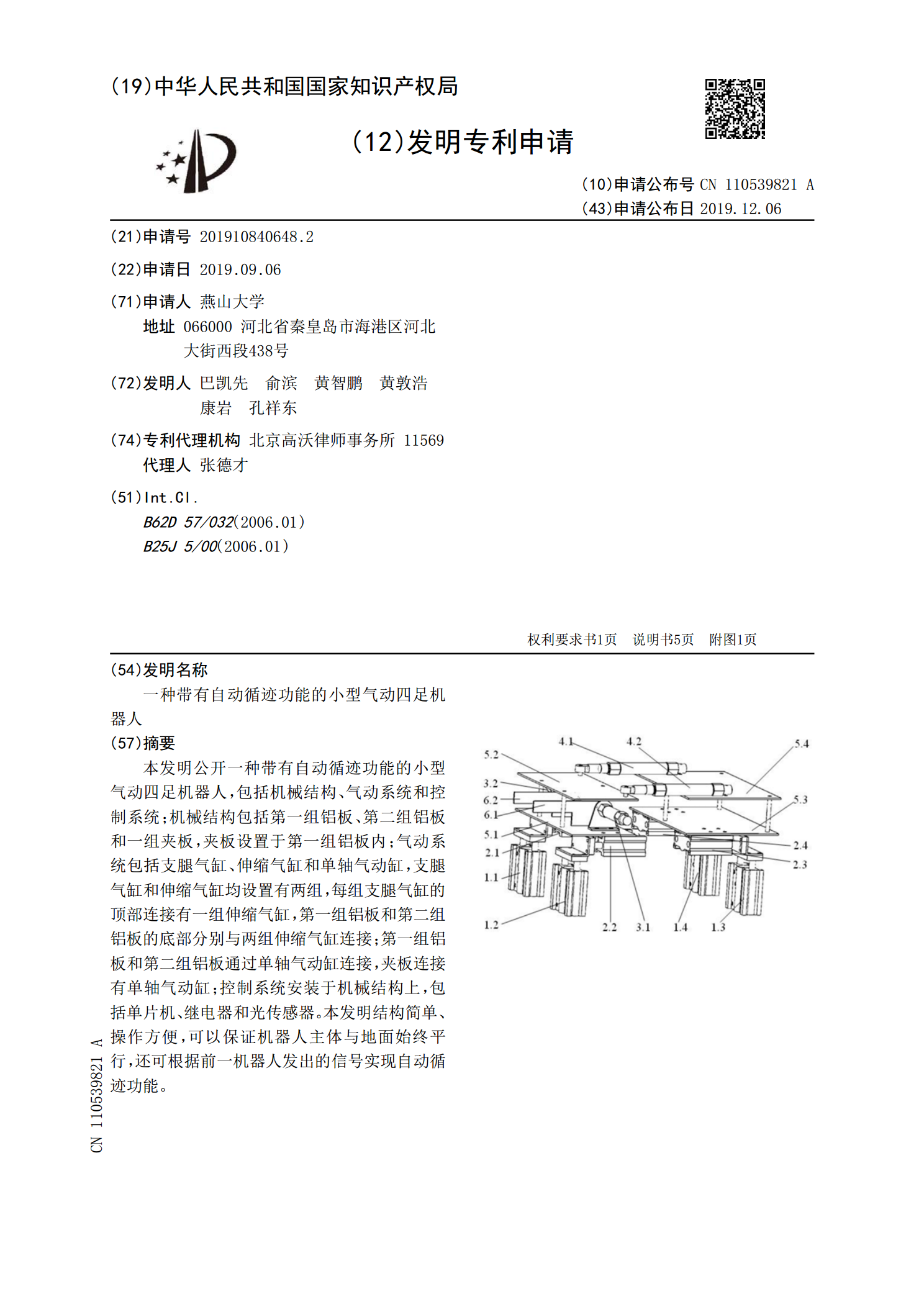
本发明公开一种带有自动循迹功能的小型气动四足机器人,包括机械结构、气动系统和控制系统;机械结构包括第一组铝板、第二组铝板和一组夹板,夹板设置于第一组铝板内;气动系统包括支腿气缸、伸缩气缸和单轴气动缸,支腿气缸和伸缩气缸均设置有两组,每组支腿气缸的顶部连接有一组伸缩气缸,第一组铝板和第二组铝板的底部分别与两组伸缩气缸连接;第一组铝板和第二组铝板通过单轴气动缸连接,夹板连接有单轴气动缸;控制系统安装于机械结构上,包括单片机、继电器和光传感器。本发明结构简单、操作方便,可以保证机器人主体与地面始终平行,还可根据

四足仿生机器人的循迹算法研究.docx
四足仿生机器人的循迹算法研究四足仿生机器人的循迹算法研究摘要:四足仿生机器人是一种以生物动物四肢为原型设计的机器人,具有优秀的运动能力和适应性,广泛应用于探索、搜救、救援等领域。循迹算法是四足仿生机器人实现自主导航和路径跟踪的核心技术之一。本文针对四足仿生机器人的循迹算法进行研究,分析了传统算法的不足,并提出了基于视觉感知和智能控制的新型循迹算法。通过实验验证,该算法具有较好的循迹效果和鲁棒性,可以提高四足仿生机器人的导航和路径跟踪能力。关键词:四足仿生机器人、循迹算法、视觉感知、智能控制、导航、路径跟踪

一种具有定位与循迹功能的微小型移动机器人运动底盘.pdf
本发明公开了一种具有定位与循迹功能的微小型移动机器人运动底盘,包括机械底盘、微控制器、光电定位模块、光电循迹模块、两个差动驱动轮和一个万向牛眼轮;两个差动驱动轮设在机械底盘的两侧,光电定位模块、光电循迹模块和万向牛眼轮分别镶嵌在机械底盘的底面上,并且两个差动驱动轮和万向牛眼轮呈等腰三角形分布;所述机械底盘的顶面上设有两个扩展端口;本发明在微小尺寸的限制下,结合现有先进的光电传感技术,紧凑地将光电定位与光电循迹功能集成在微小型移动微机器人运动底盘中,使微小型移动机器人运动底盘同时具备了定位与循迹功能,可大大
一种基于气动系统的多功能多足仿生机器人系统.pdf
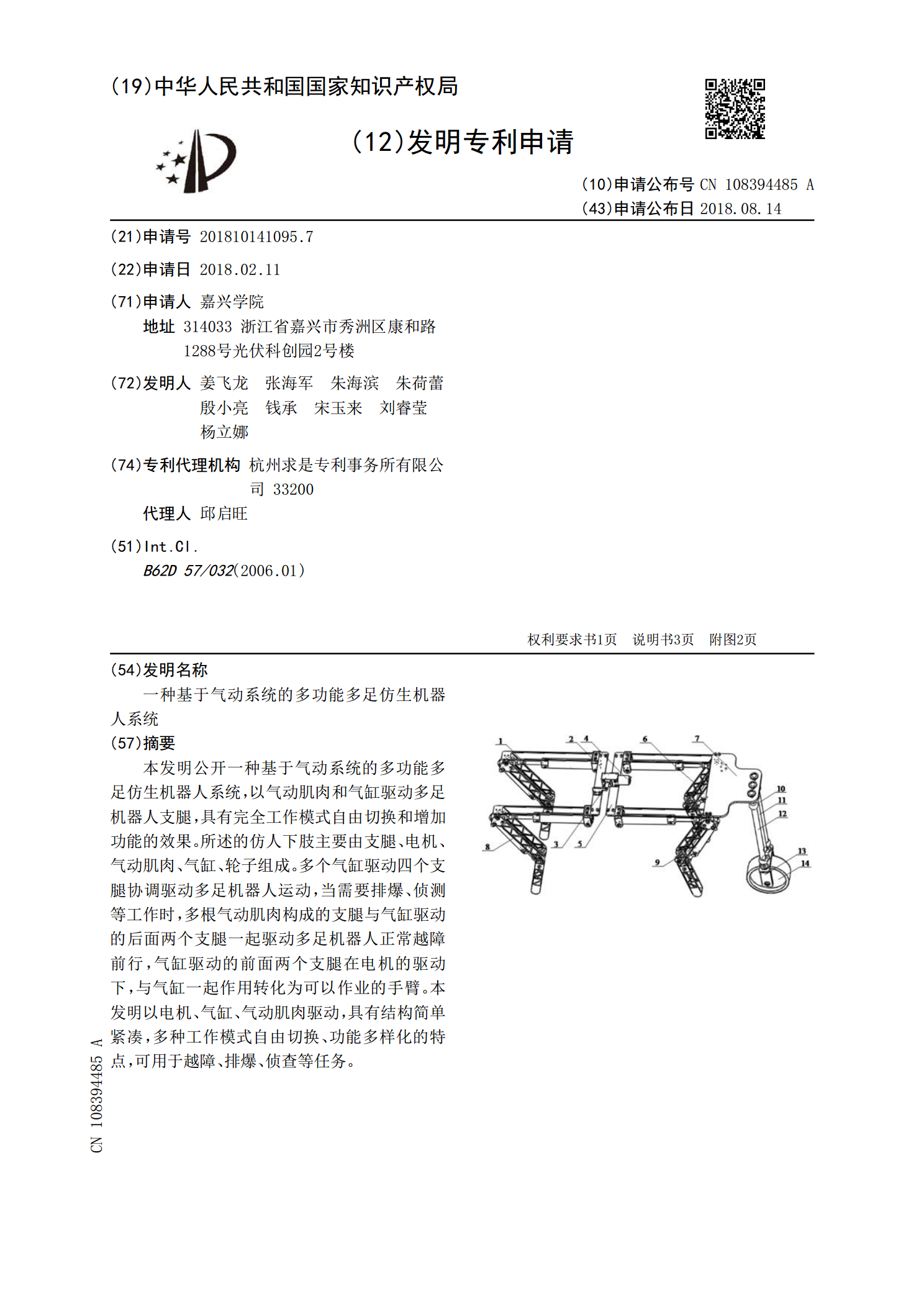
本发明公开一种基于气动系统的多功能多足仿生机器人系统,以气动肌肉和气缸驱动多足机器人支腿,具有完全工作模式自由切换和增加功能的效果。所述的仿人下肢主要由支腿、电机、气动肌肉、气缸、轮子组成。多个气缸驱动四个支腿协调驱动多足机器人运动,当需要排爆、侦测等工作时,多根气动肌肉构成的支腿与气缸驱动的后面两个支腿一起驱动多足机器人正常越障前行,气缸驱动的前面两个支腿在电机的驱动下,与气缸一起作用转化为可以作业的手臂。本发明以电机、气缸、气动肌肉驱动,具有结构简单紧凑,多种工作模式自由切换、功能多样化的特点,可用于

一种自动循迹涂胶机器人.pdf
本发明提供一种自动循迹涂胶机器人,包括底盘、四个转向电机、顶杆、拨块、复位弹簧等,其特征在于:四个转向电机分别固定安装在底盘四角的圆形孔内;四副车轮分别固定安装在转向电机的电机轴上;两副第一直线滑轨对称安装在底盘的前后两侧;第一齿条平行于第一直线滑轨安装在底盘靠后一侧;纵向运动模块两端分别固定安装在两副第一直线滑轨之间。本发明具有以下优点:本发明采用摄像头循迹,利用XY两轴联动机构进行挤出定位,使用凸轮机构进行挤出,采用独立转向车轮,具有循迹、定位准确、快速,挤出均匀、持续,适应性强的特点。