
一种基于气动系统的多功能多足仿生机器人系统.pdf

猫巷****熙柔


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于气动系统的多功能多足仿生机器人系统.pdf
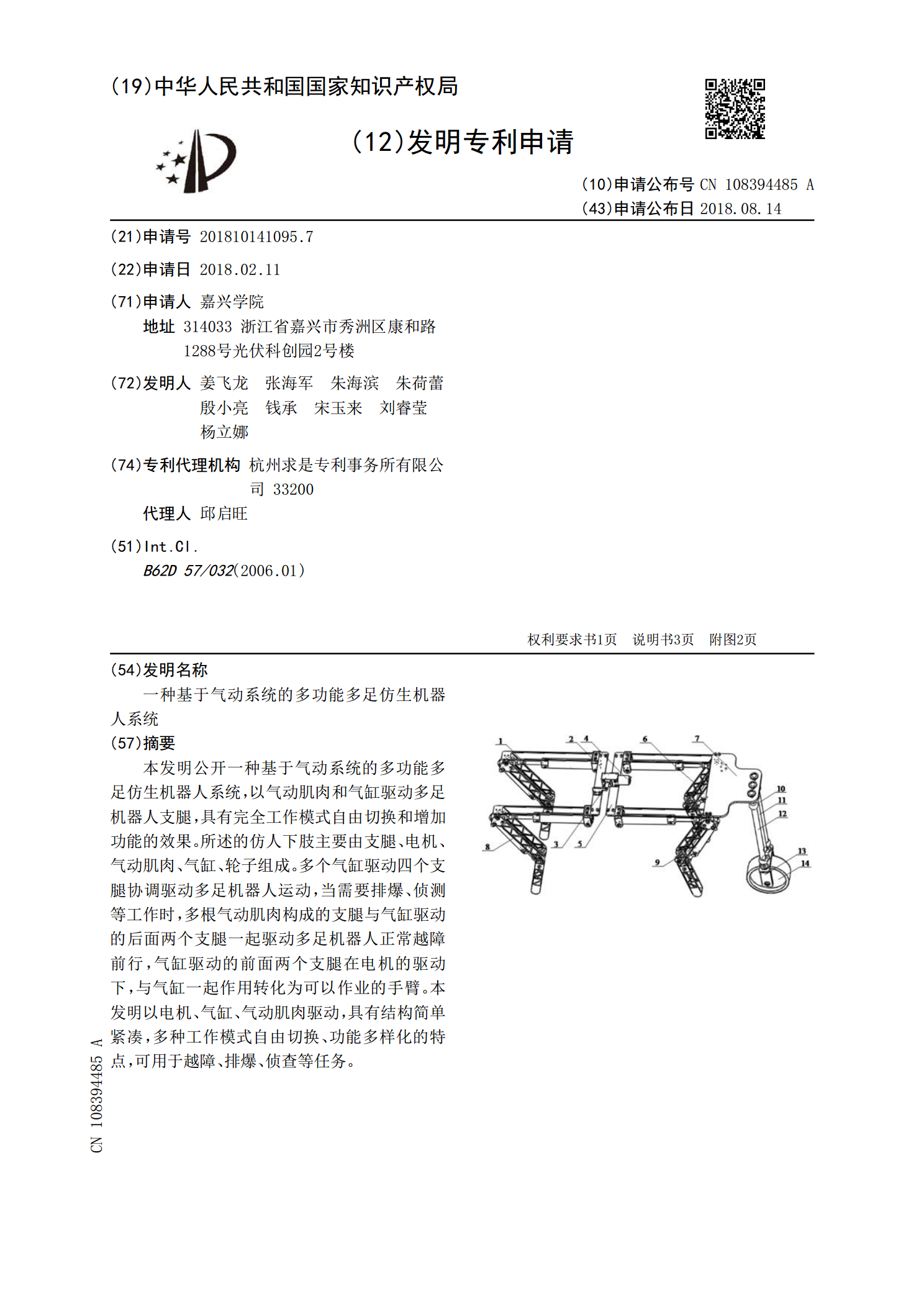
本发明公开一种基于气动系统的多功能多足仿生机器人系统,以气动肌肉和气缸驱动多足机器人支腿,具有完全工作模式自由切换和增加功能的效果。所述的仿人下肢主要由支腿、电机、气动肌肉、气缸、轮子组成。多个气缸驱动四个支腿协调驱动多足机器人运动,当需要排爆、侦测等工作时,多根气动肌肉构成的支腿与气缸驱动的后面两个支腿一起驱动多足机器人正常越障前行,气缸驱动的前面两个支腿在电机的驱动下,与气缸一起作用转化为可以作业的手臂。本发明以电机、气缸、气动肌肉驱动,具有结构简单紧凑,多种工作模式自由切换、功能多样化的特点,可用于
一种基于气动肌肉的多足仿生机器人系统.pdf
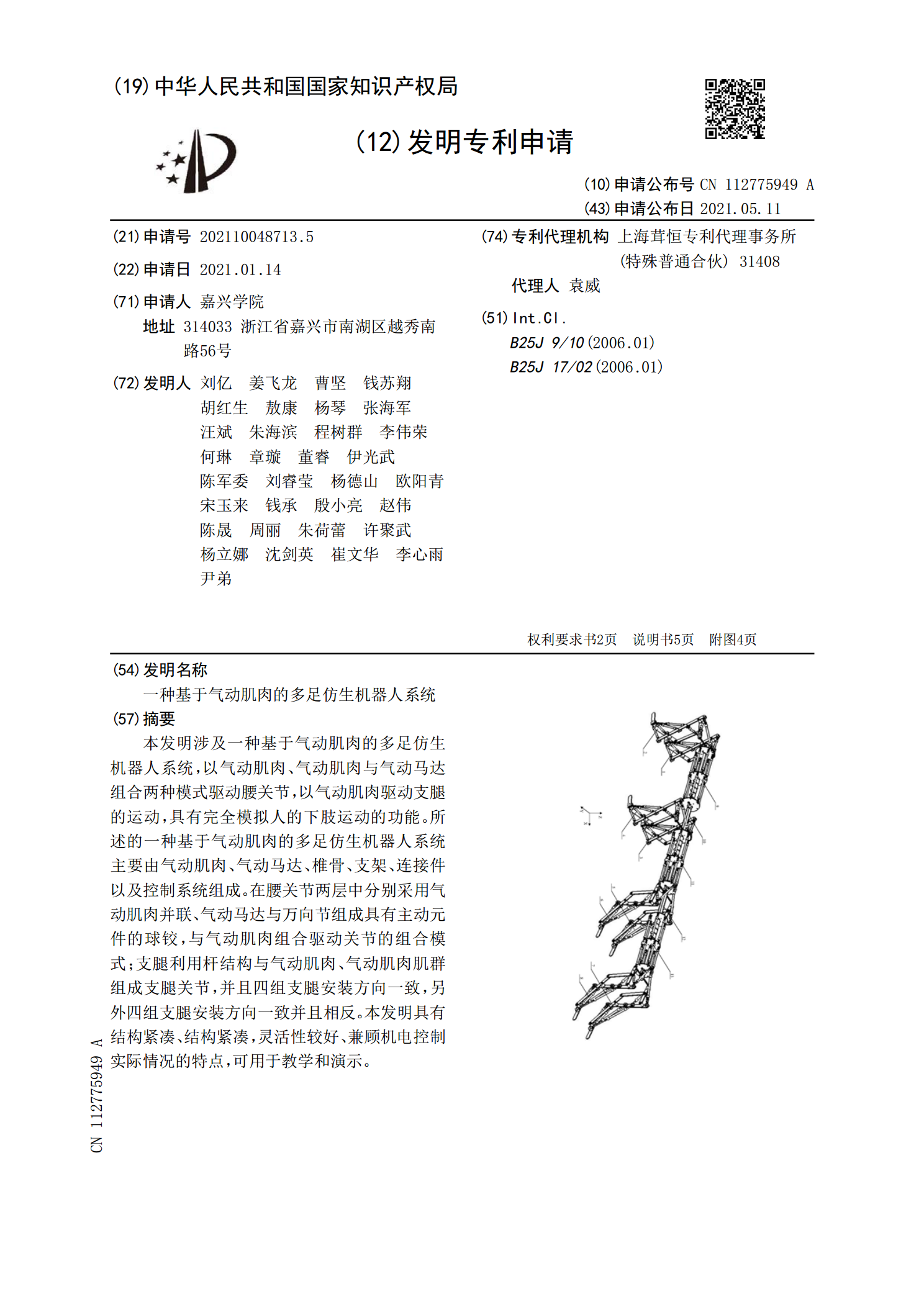
本发明涉及一种基于气动肌肉的多足仿生机器人系统,以气动肌肉、气动肌肉与气动马达组合两种模式驱动腰关节,以气动肌肉驱动支腿的运动,具有完全模拟人的下肢运动的功能。所述的一种基于气动肌肉的多足仿生机器人系统主要由气动肌肉、气动马达、椎骨、支架、连接件以及控制系统组成。在腰关节两层中分别采用气动肌肉并联、气动马达与万向节组成具有主动元件的球铰,与气动肌肉组合驱动关节的组合模式;支腿利用杆结构与气动肌肉、气动肌肉肌群组成支腿关节,并且四组支腿安装方向一致,另外四组支腿安装方向一致并且相反。本发明具有结构紧凑、结构

基于ARM的六足仿生机器人野外定位系统.docx
基于ARM的六足仿生机器人野外定位系统摘要随着科技的不断发展,机器人技术已经成为了科技领域的一个重要的研究方向。六足仿生机器人作为典型的仿生机器人之一,其移动能力和应用领域都非常广泛。而在野外环境下,机器人的定位技术显得尤为重要。因此,本文基于ARM平台开发了一种六足仿生机器人野外定位系统,并在实验室和野外环境下对该系统进行了测试与验证。实验结果表明,该系统具有非常不错的定位精度和稳定性,为六足仿生机器人在野外环境下的应用提供了有力支持。关键词:六足仿生机器人;野外定位;ARM平台1.研究背景与意义六足仿

一种两足四轮可变行走机构多功能仿生机器人系统.pdf
目前的多足类机器人存在着功能单一、移动速度慢、越障能力差等缺点,难以满足人们的需求。为了解决上述问题,本发明提供了一种两足四轮可变行走机构多功能仿生机器人系统,它包括车体、车轮、轮毂电机、机械腿支座、机械腿铰链、上部机械腿连杆、中部机械腿关节、中部机械腿连杆、下部机械腿关节、下部机械腿连杆、机械爪关节、机械爪、机械爪后指、机械爪前指、机械爪末端指阄、前超声波传感器、后超声波传感器、前视觉传感器支座、前视觉传感器、后视觉传感器支座、后视觉传感器、货箱、传感器信号处理系统、机器人控制系统和机器人驱动系统,可以

基于STM32的仿生六足越障机器人系统设计.pptx
添加副标题目录PART01设计背景系统组成仿生六足越障机器人的工作原理仿生六足越障机器人的应用场景PART02主控制器传感器模块驱动模块电源模块PART03主程序架构传感器数据处理运动控制算法越障行为实现PART04实验环境与设备实验过程与结果结果分析性能优化建议PART05系统特点与优势未来发展方向感谢您的观看