
工程机械支腿遥控系统、方法和工程机械.pdf

一只****写意

1/10

2/10
3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工程机械支腿遥控系统、方法和工程机械.pdf
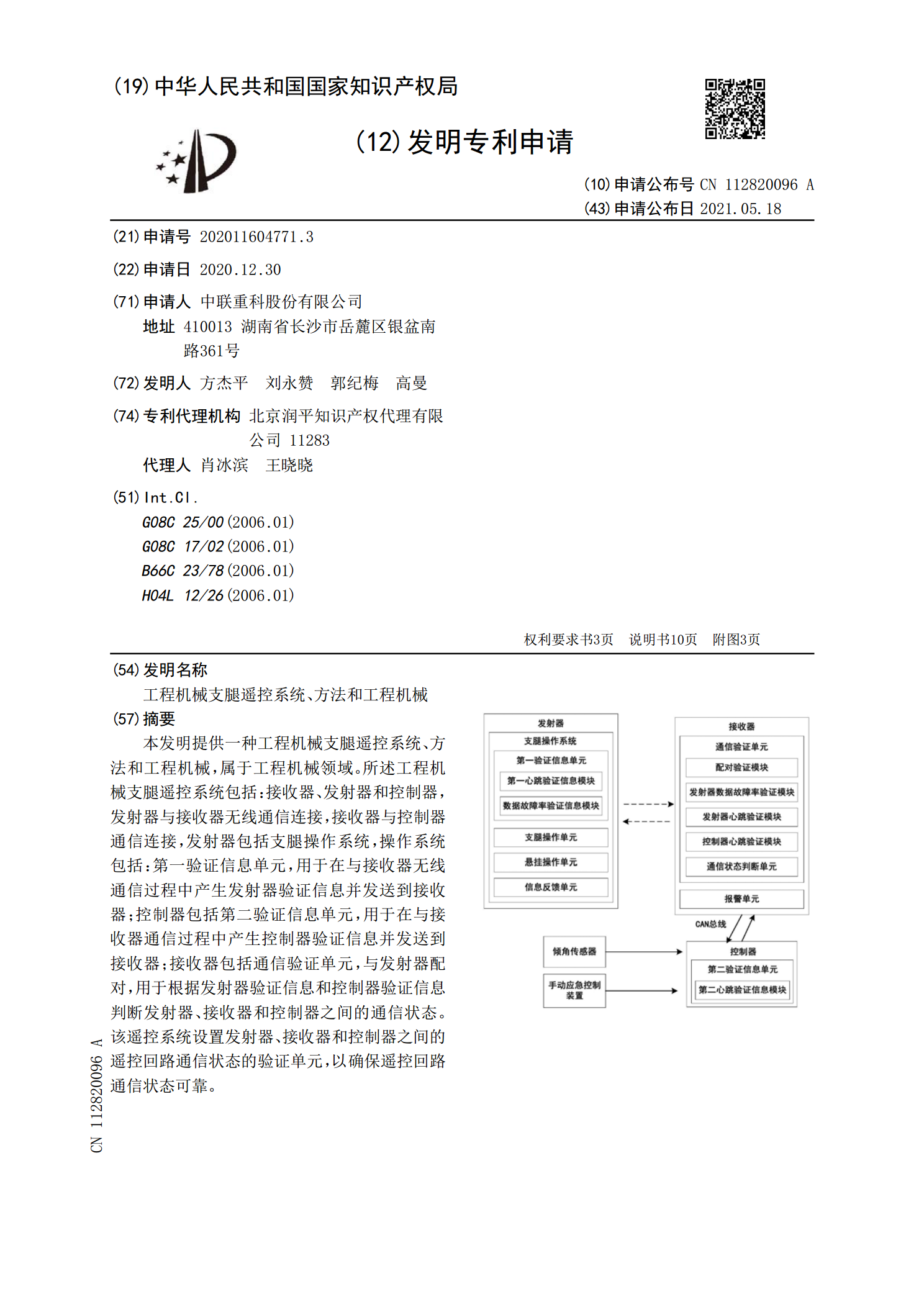
本发明提供一种工程机械支腿遥控系统、方法和工程机械,属于工程机械领域。所述工程机械支腿遥控系统包括:接收器、发射器和控制器,发射器与接收器无线通信连接,接收器与控制器通信连接,发射器包括支腿操作系统,操作系统包括:第一验证信息单元,用于在与接收器无线通信过程中产生发射器验证信息并发送到接收器;控制器包括第二验证信息单元,用于在与接收器通信过程中产生控制器验证信息并发送到接收器;接收器包括通信验证单元,与发射器配对,用于根据发射器验证信息和控制器验证信息判断发射器、接收器和控制器之间的通信状态。该遥控系统设
支腿系统和工程机械.pdf
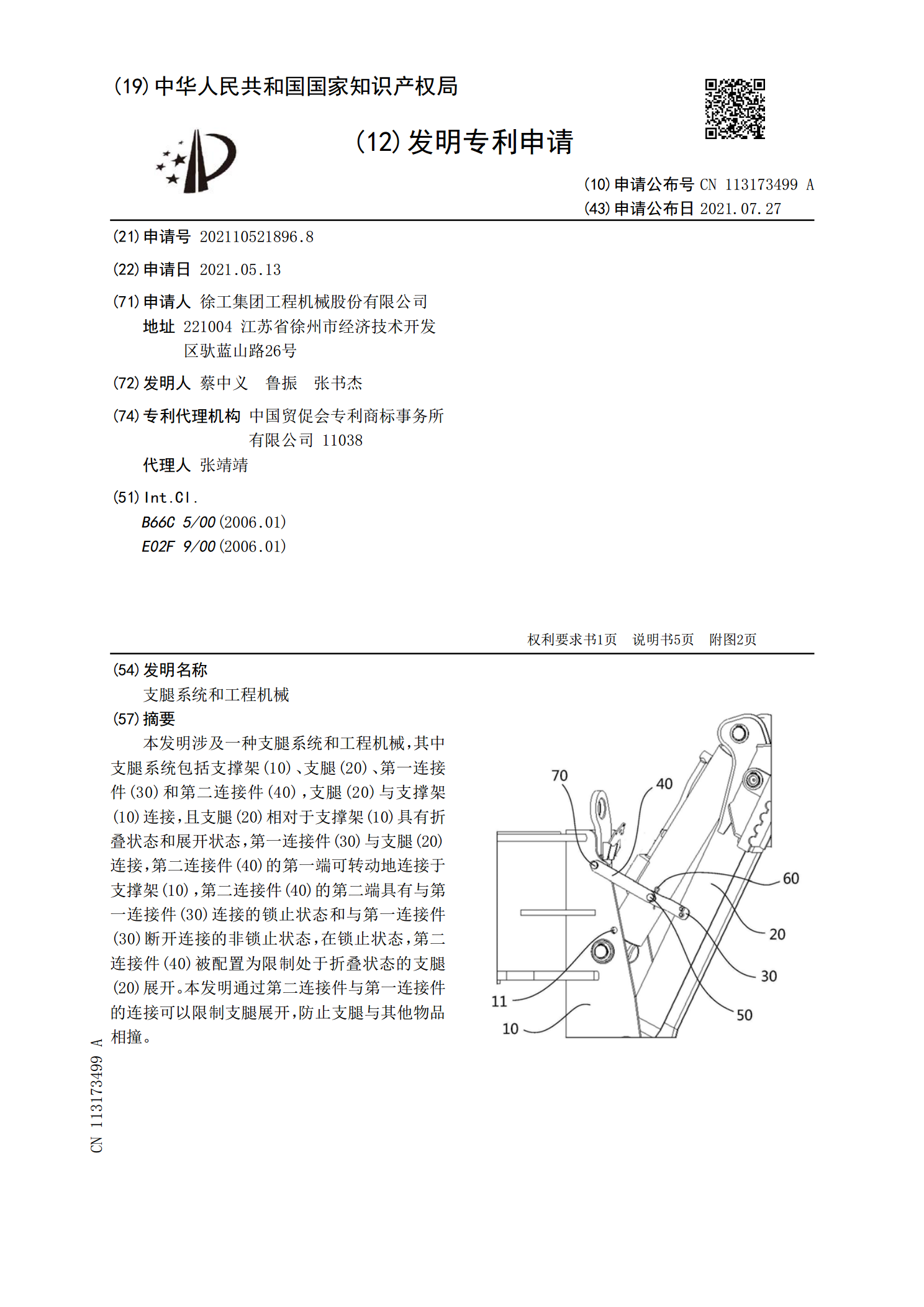
本发明涉及一种支腿系统和工程机械,其中支腿系统包括支撑架(10)、支腿(20)、第一连接件(30)和第二连接件(40),支腿(20)与支撑架(10)连接,且支腿(20)相对于支撑架(10)具有折叠状态和展开状态,第一连接件(30)与支腿(20)连接,第二连接件(40)的第一端可转动地连接于支撑架(10),第二连接件(40)的第二端具有与第一连接件(30)连接的锁止状态和与第一连接件(30)断开连接的非锁止状态,在锁止状态,第二连接件(40)被配置为限制处于折叠状态的支腿(20)展开。本发明通过第二连接件与
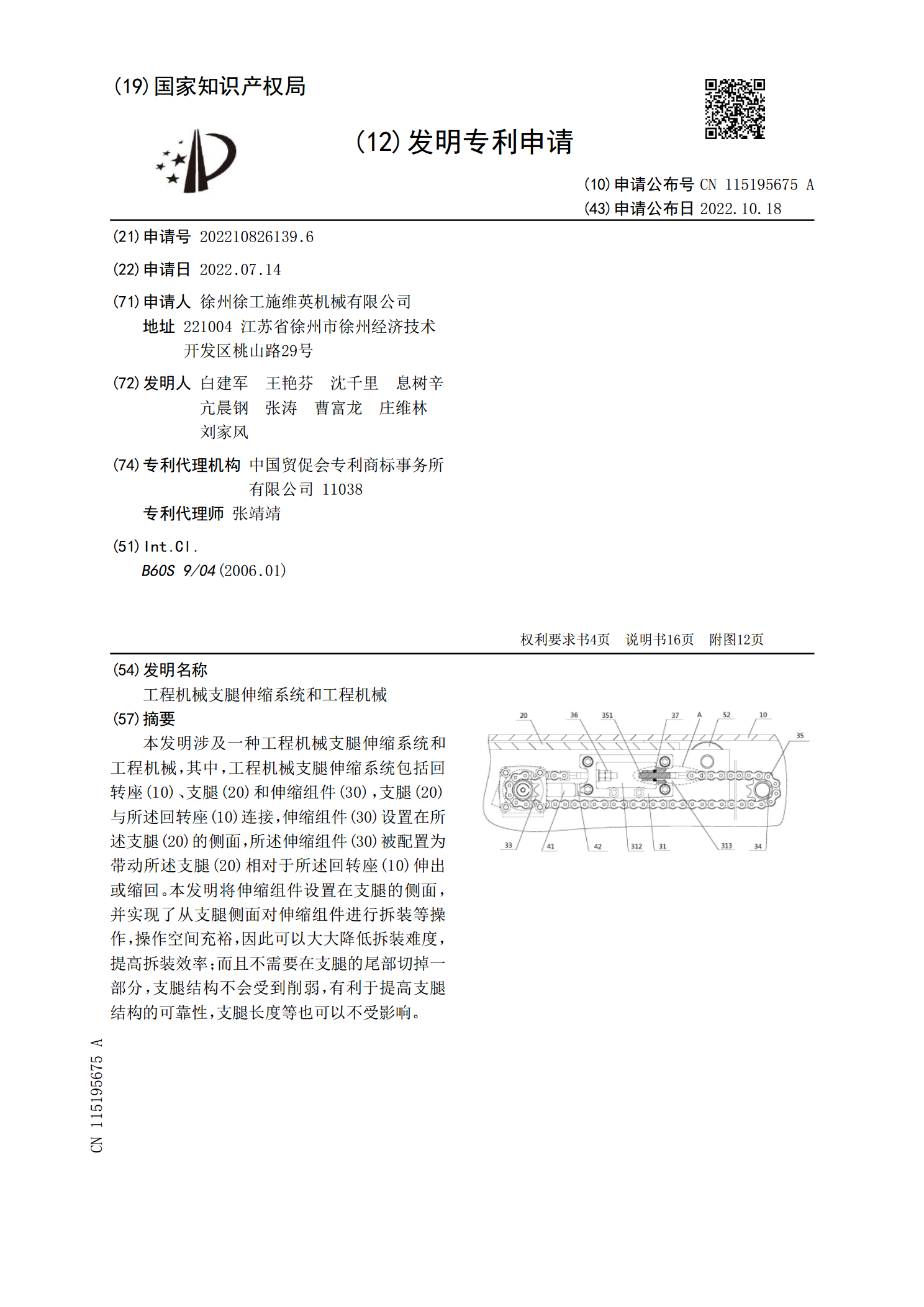
工程机械支腿伸缩系统和工程机械.pdf
本发明涉及一种工程机械支腿伸缩系统和工程机械,其中,工程机械支腿伸缩系统包括回转座(10)、支腿(20)和伸缩组件(30),支腿(20)与所述回转座(10)连接,伸缩组件(30)设置在所述支腿(20)的侧面,所述伸缩组件(30)被配置为带动所述支腿(20)相对于所述回转座(10)伸出或缩回。本发明将伸缩组件设置在支腿的侧面,并实现了从支腿侧面对伸缩组件进行拆装等操作,操作空间充裕,因此可以大大降低拆装难度,提高拆装效率;而且不需要在支腿的尾部切掉一部分,支腿结构不会受到削弱,有利于提高支腿结构的可靠性,支
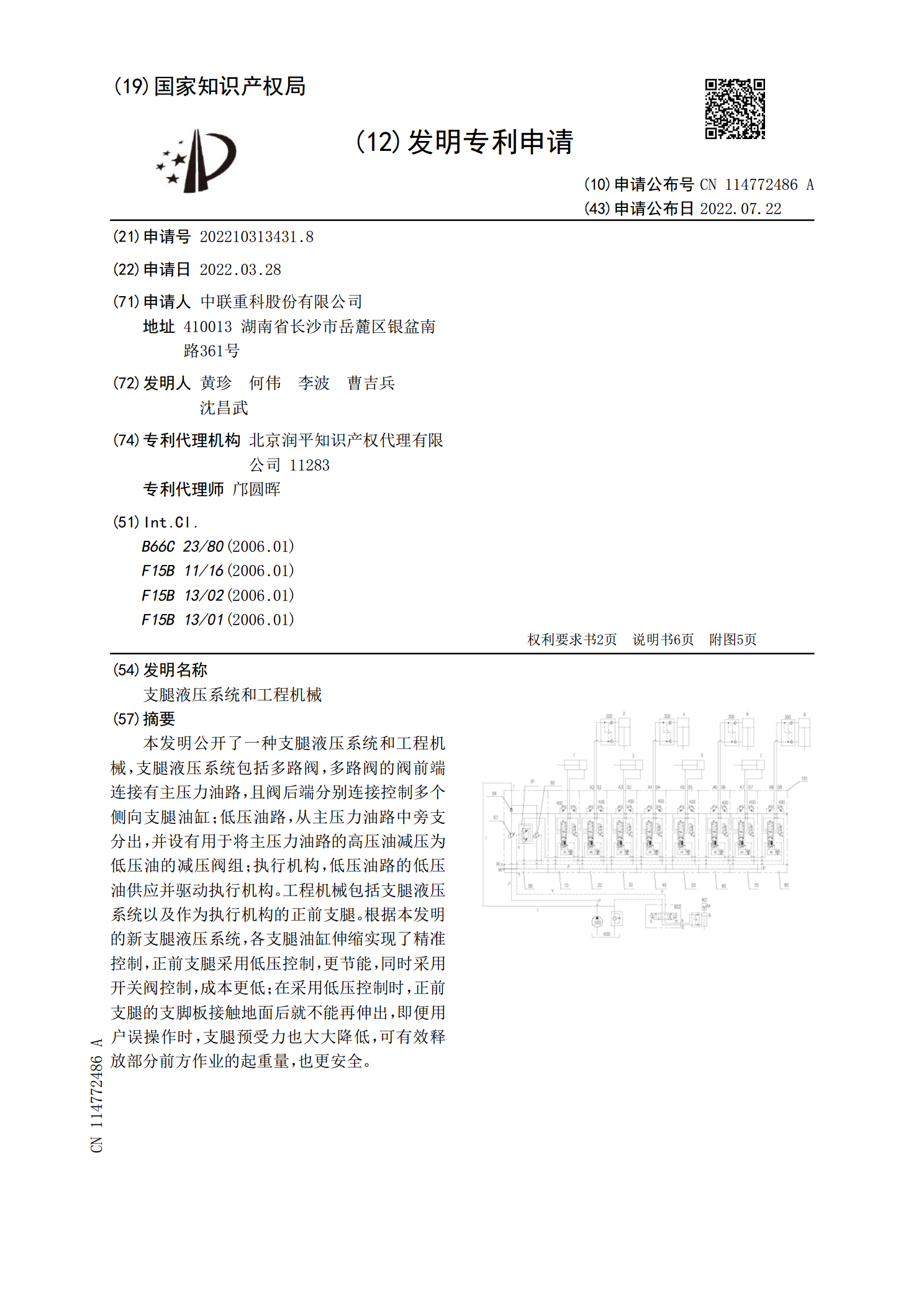
支腿液压系统和工程机械.pdf
本发明公开了一种支腿液压系统和工程机械,支腿液压系统包括多路阀,多路阀的阀前端连接有主压力油路,且阀后端分别连接控制多个侧向支腿油缸;低压油路,从主压力油路中旁支分出,并设有用于将主压力油路的高压油减压为低压油的减压阀组;执行机构,低压油路的低压油供应并驱动执行机构。工程机械包括支腿液压系统以及作为执行机构的正前支腿。根据本发明的新支腿液压系统,各支腿油缸伸缩实现了精准控制,正前支腿采用低压控制,更节能,同时采用开关阀控制,成本更低;在采用低压控制时,正前支腿的支脚板接触地面后就不能再伸出,即便用户误操作
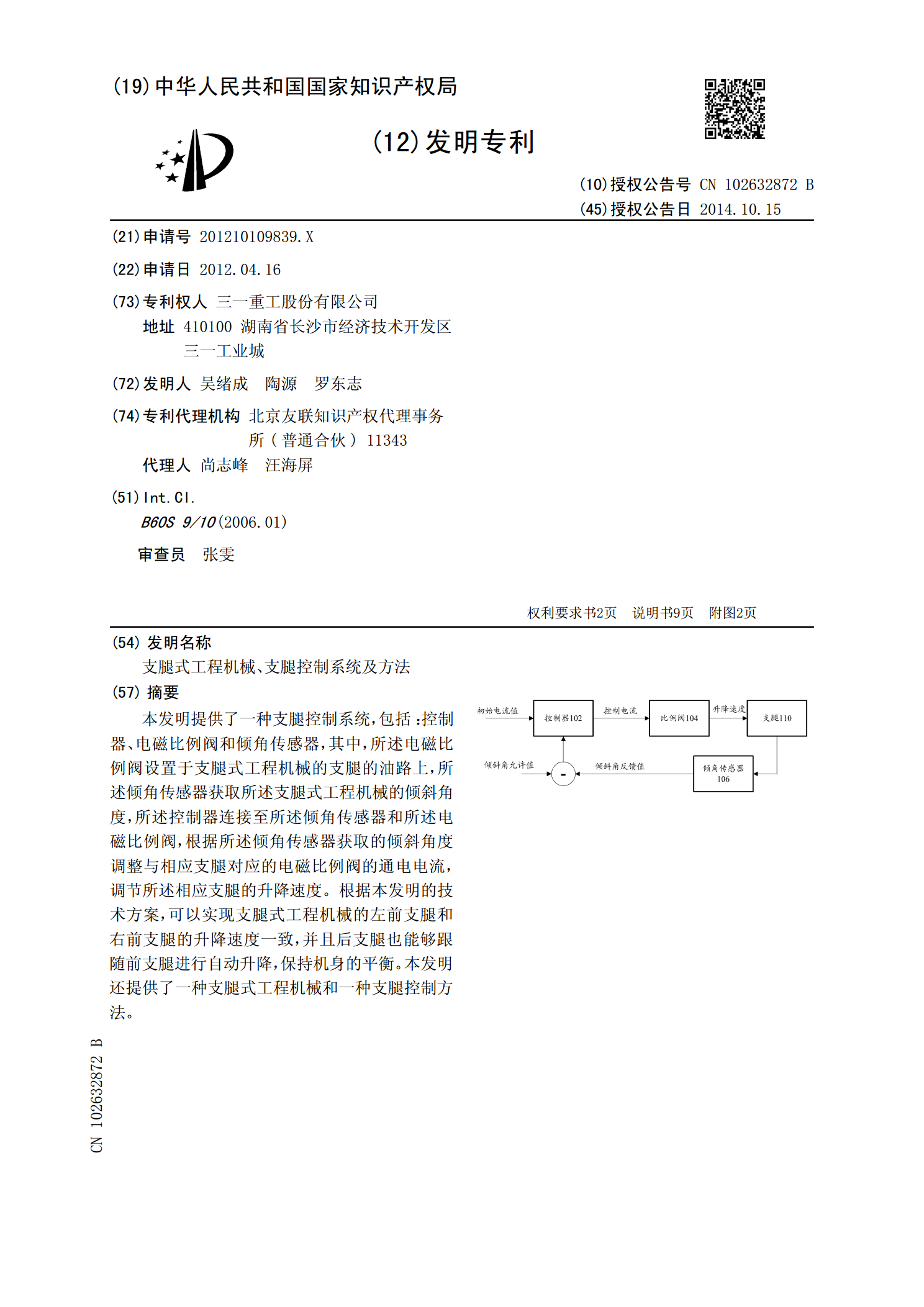
支腿式工程机械、支腿控制系统及方法.pdf
本发明提供了一种支腿控制系统,包括:控制器、电磁比例阀和倾角传感器,其中,所述电磁比例阀设置于支腿式工程机械的支腿的油路上,所述倾角传感器获取所述支腿式工程机械的倾斜角度,所述控制器连接至所述倾角传感器和所述电磁比例阀,根据所述倾角传感器获取的倾斜角度调整与相应支腿对应的电磁比例阀的通电电流,调节所述相应支腿的升降速度。根据本发明的技术方案,可以实现支腿式工程机械的左前支腿和右前支腿的升降速度一致,并且后支腿也能够跟随前支腿进行自动升降,保持机身的平衡。本发明还提供了一种支腿式工程机械和一种支腿控制方法。