
一种轮式移动机器人驱动轮.pdf

一吃****仕龙

1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种轮式移动机器人驱动轮.pdf
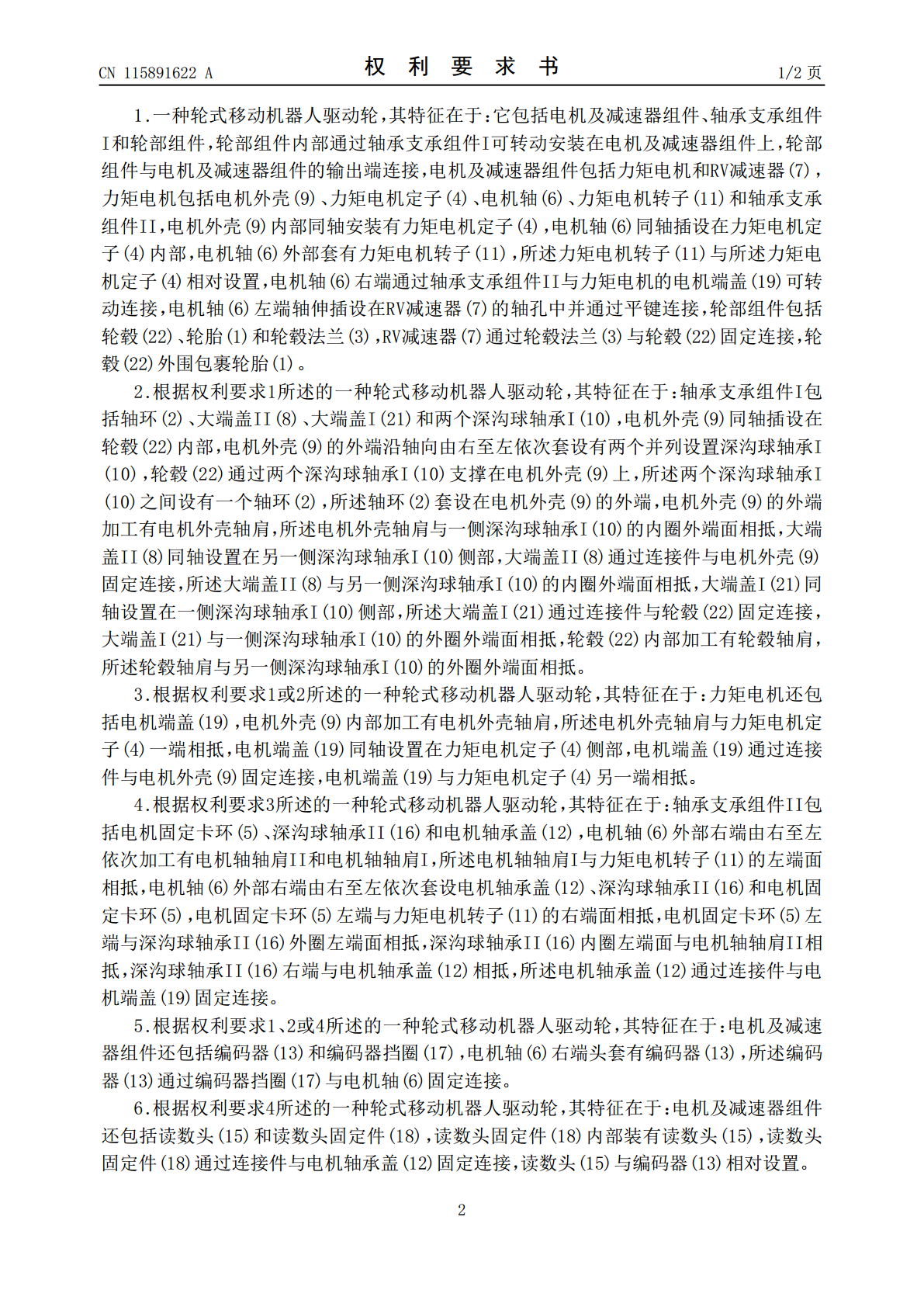
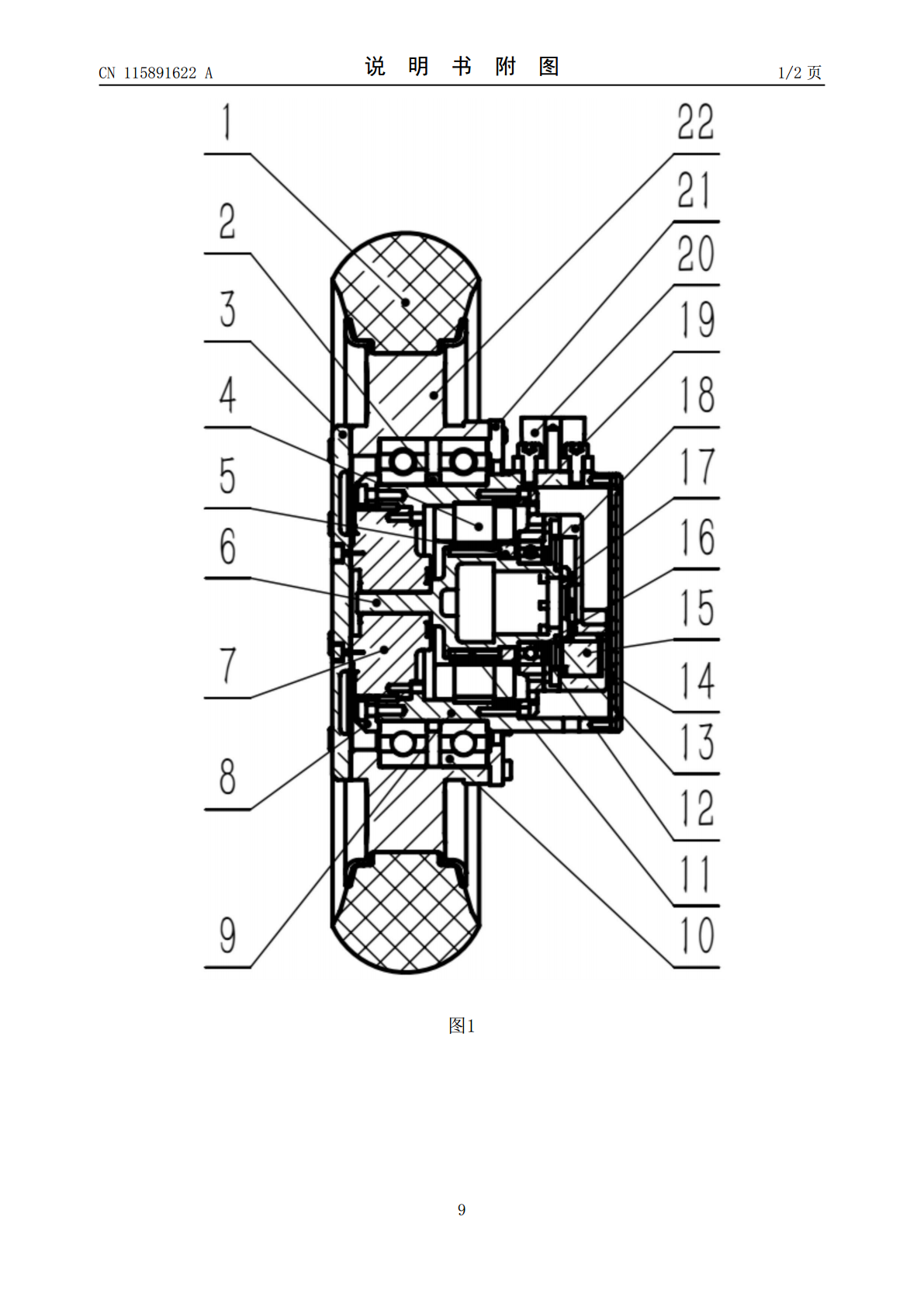
一种轮式移动机器人驱动轮,它涉及机器人轮毂驱动轮领域。本发明解决了现有的轮毂电机驱动轮存在系统集成化程度低,且输出扭矩与承重弯矩为非分离结构,导致抗冲击能力较弱的问题。本发明的电机外壳内部同轴安装有力矩电机定子,电机轴同轴插设在力矩电机定子内部,电机轴外部套有力矩电机转子,所述力矩电机转子与所述力矩电机定子相对设置,电机轴右端通过轴承支承组件II与力矩电机的电机端盖可转动连接,电机轴左端轴伸插设在RV减速器的轴孔中并通过平键连接,轮部组件包括轮毂、轮胎和轮毂法兰,RV减速器通过轮毂法兰与轮毂固定连接,轮毂
轮式移动机器人的驱动轮固定装置.pdf
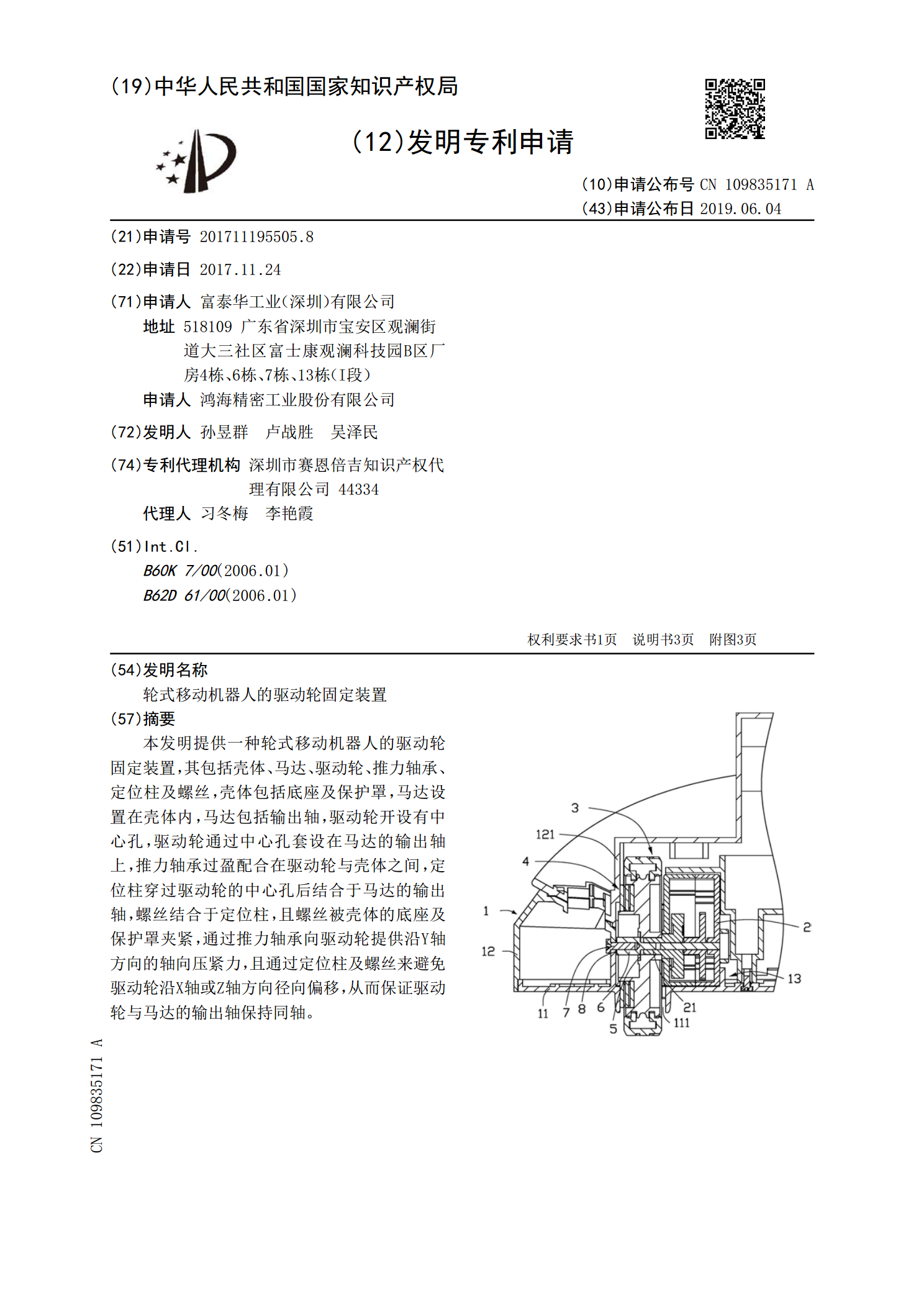
本发明提供一种轮式移动机器人的驱动轮固定装置,其包括壳体、马达、驱动轮、推力轴承、定位柱及螺丝,壳体包括底座及保护罩,马达设置在壳体内,马达包括输出轴,驱动轮开设有中心孔,驱动轮通过中心孔套设在马达的输出轴上,推力轴承过盈配合在驱动轮与壳体之间,定位柱穿过驱动轮的中心孔后结合于马达的输出轴,螺丝结合于定位柱,且螺丝被壳体的底座及保护罩夹紧,通过推力轴承向驱动轮提供沿Y轴方向的轴向压紧力,且通过定位柱及螺丝来避免驱动轮沿X轴或Z轴方向径向偏移,从而保证驱动轮与马达的输出轴保持同轴。
一种轮式移动机器人.pdf
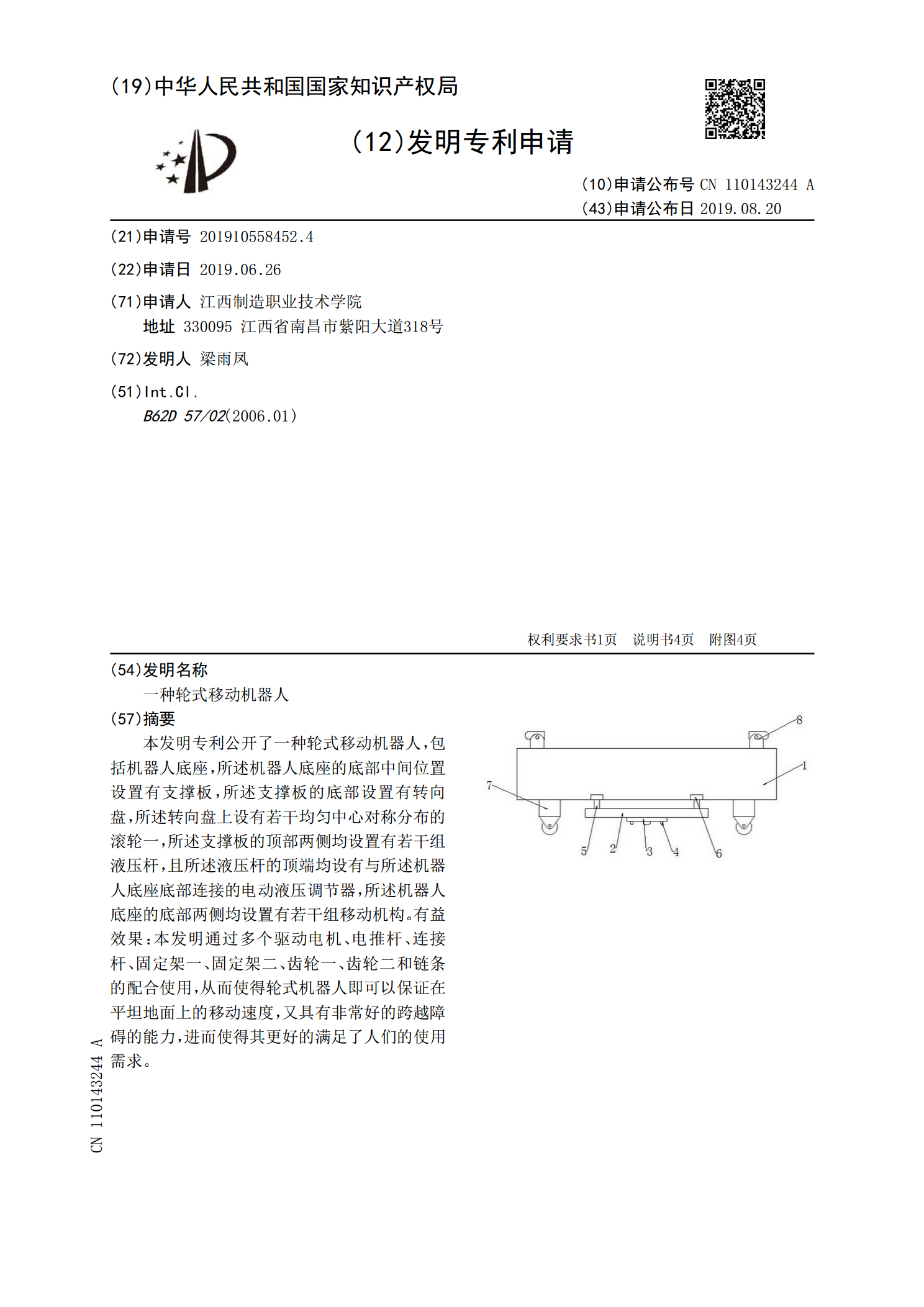
本发明专利公开了一种轮式移动机器人,包括机器人底座,所述机器人底座的底部中间位置设置有支撑板,所述支撑板的底部设置有转向盘,所述转向盘上设有若干均匀中心对称分布的滚轮一,所述支撑板的顶部两侧均设置有若干组液压杆,且所述液压杆的顶端均设有与所述机器人底座底部连接的电动液压调节器,所述机器人底座的底部两侧均设置有若干组移动机构。有益效果:本发明通过多个驱动电机、电推杆、连接杆、固定架一、固定架二、齿轮一、齿轮二和链条的配合使用,从而使得轮式机器人即可以保证在平坦地面上的移动速度,又具有非常好的跨越障碍的能力,
一种轮式自主移动机器人.pdf
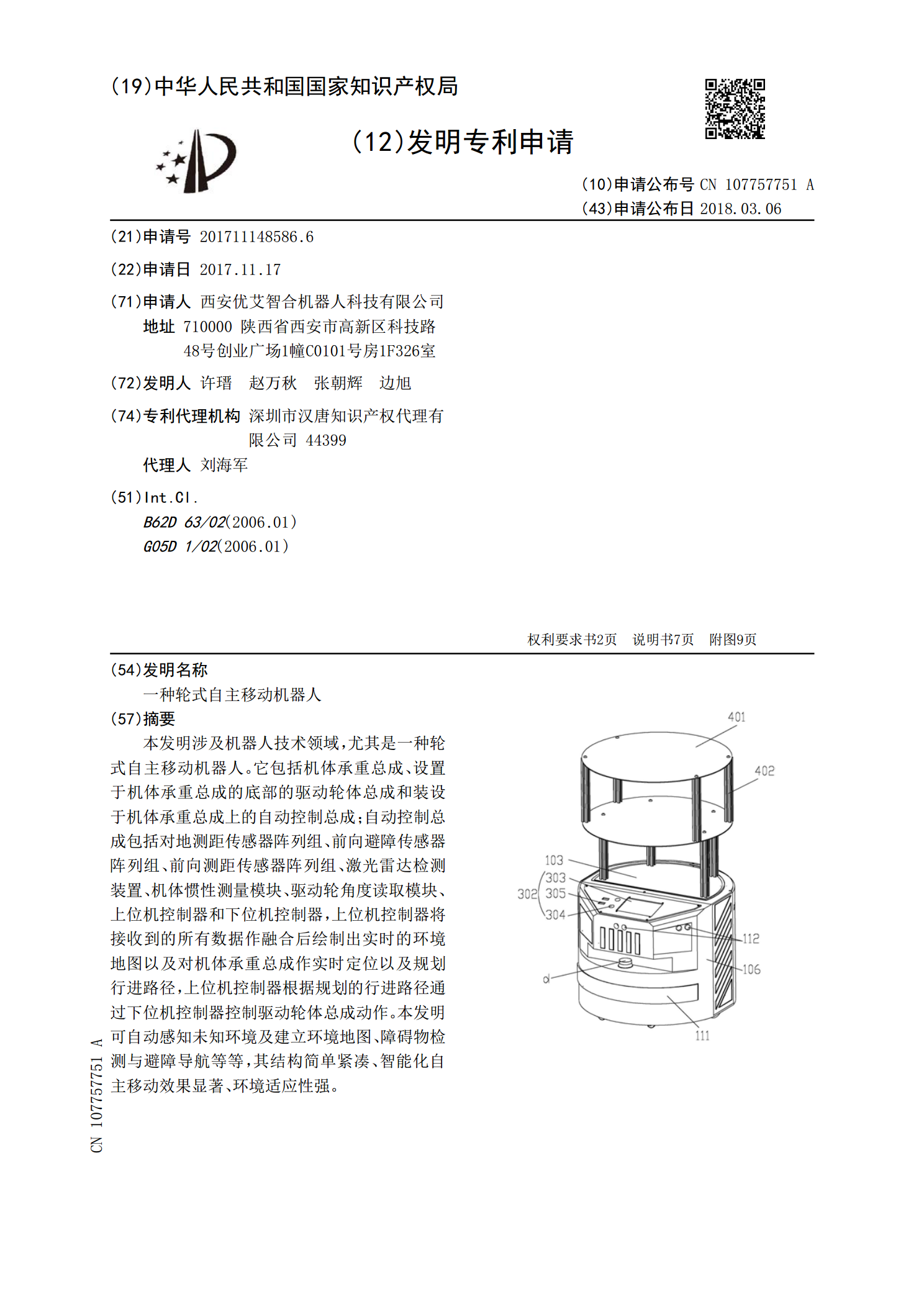
本发明涉及机器人技术领域,尤其是一种轮式自主移动机器人。它包括机体承重总成、设置于机体承重总成的底部的驱动轮体总成和装设于机体承重总成上的自动控制总成;自动控制总成包括对地测距传感器阵列组、前向避障传感器阵列组、前向测距传感器阵列组、激光雷达检测装置、机体惯性测量模块、驱动轮角度读取模块、上位机控制器和下位机控制器,上位机控制器将接收到的所有数据作融合后绘制出实时的环境地图以及对机体承重总成作实时定位以及规划行进路径,上位机控制器根据规划的行进路径通过下位机控制器控制驱动轮体总成动作。本发明可自动感知未知

一种同步驱动轮式电磁钢轨探伤装置.pdf
本发明提供了一种同步驱动轮式电磁钢轨探伤装置,以电磁检测技术为指导,通过应用阵列电磁传感器来进行钢轨缺陷检测,霍尔传感器用于测量列车车轮速度,测量的脉冲信号信息可靠传递给嵌入式钢轨处理模块,CPU根据脉冲信号信息计算出列车车速来反馈驱动模块内的驱动轮电机来调控检测轮轮轴转动,从而调控检测轮与钢轨的摩擦,减少打滑,阵列电磁传感器顺次安装于“步进式”轮孔内,减少了电磁传感器的磨损和安装空间,同时电磁传感器与轨面近距离接触,提高检测精度。在电磁信号前端处理方面,电磁感应信号处理电路实时可靠处理信号,减少了距离传