
一种车载式无人机自主充电平台.pdf

大渊****公主


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载式无人机自主充电平台.pdf
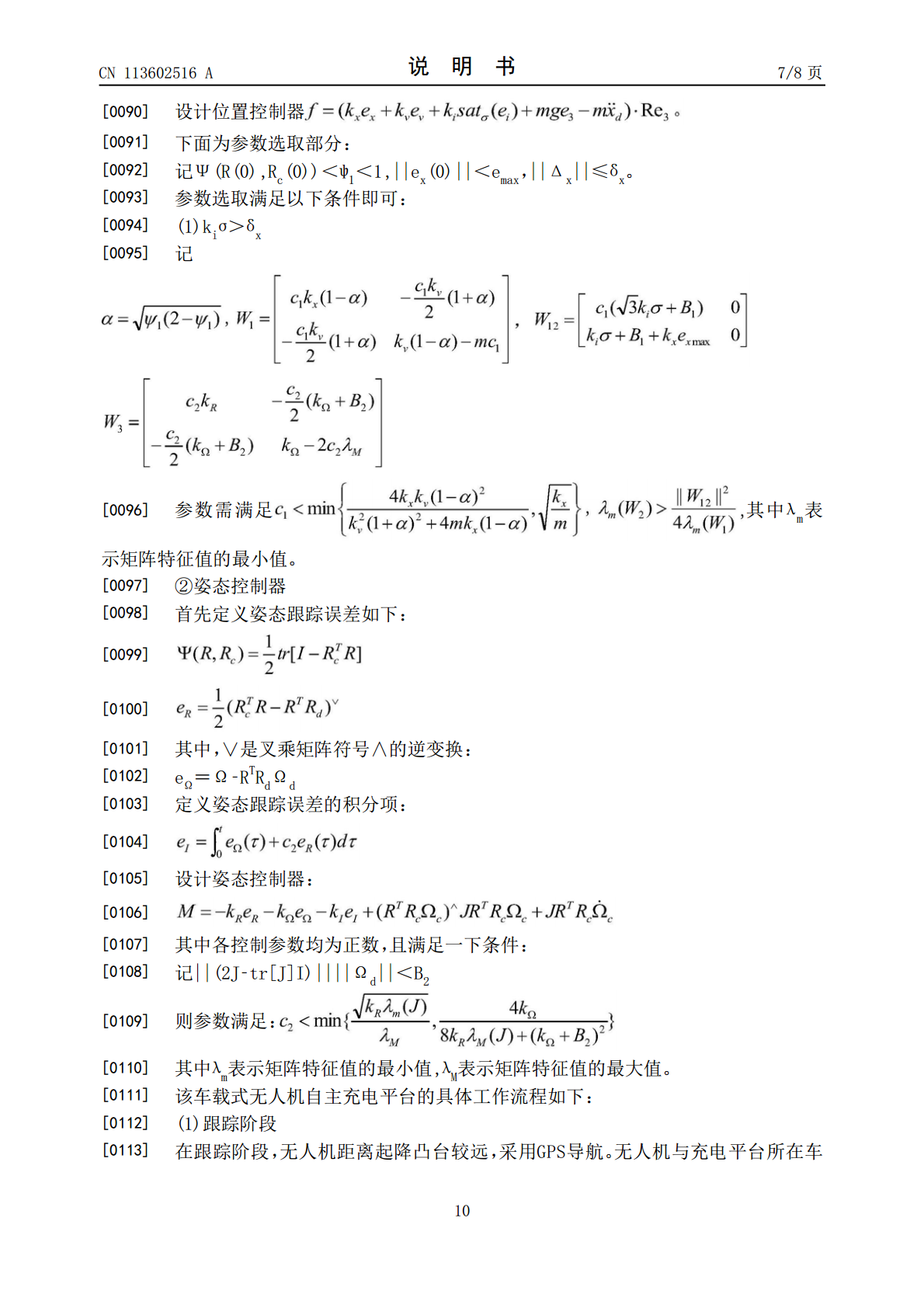
本发明公开了一种车载式无人机自主充电平台,属于无人机技术领域;包括车顶机库,在其内安装的起降凸台和四旋翼无人机,以及无人机和起降凸台配套的充电接口装置,且起降凸台底部设有电磁铁阵列,用于紧紧吸附无人机支腿;所述无人机包括控制器,控制器分为位置控制器和姿态控制器,通过计算无人机产生的合外力大小和合外力矩分别控制无人机的位置镇定和姿态稳定;在该自主充电平台还搭有电路系统,无人机充电时,控制器每隔0.1s测量电压,间接获得充电电路的通断信息,如果充电电路断开,控制器控制无人机重新调整位姿,直至充电线路重新闭合继

一种车载无人机充电起降平台.pdf
本发明提出了一种车载无人机充电起降平台,设置电源正极、电源负极、机载第一导电片和机载第二导电片,便于对停稳的无人机进行自动充电,设置车载起降箱体,便于无人机自动停泊和回收;设置电磁铁,便于调节无人机的停泊位置;设置气囊,便于固定无人机。
一种无人机自主充电平台.pdf
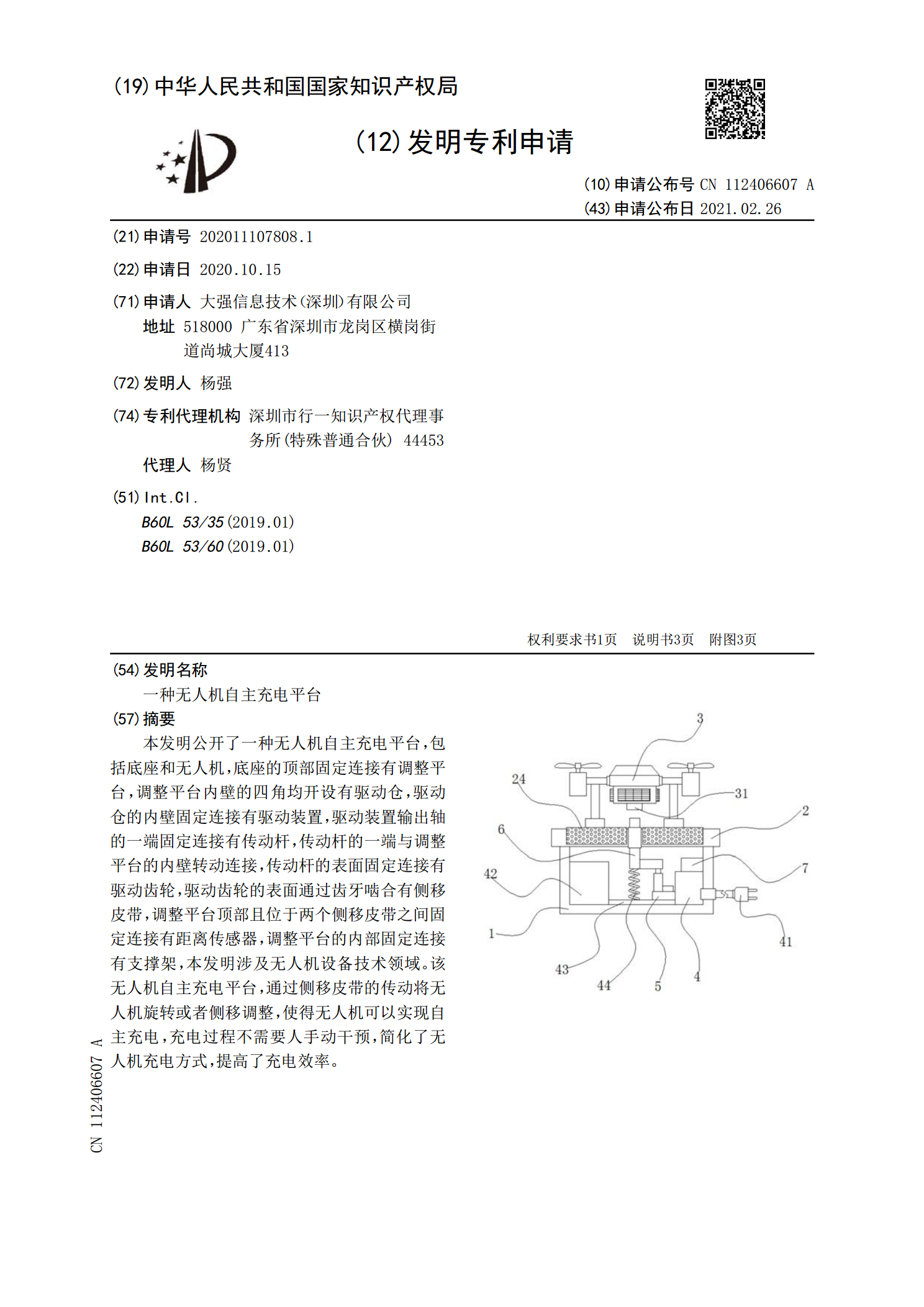
本发明公开了一种无人机自主充电平台,包括底座和无人机,底座的顶部固定连接有调整平台,调整平台内壁的四角均开设有驱动仓,驱动仓的内壁固定连接有驱动装置,驱动装置输出轴的一端固定连接有传动杆,传动杆的一端与调整平台的内壁转动连接,传动杆的表面固定连接有驱动齿轮,驱动齿轮的表面通过齿牙啮合有侧移皮带,调整平台顶部且位于两个侧移皮带之间固定连接有距离传感器,调整平台的内部固定连接有支撑架,本发明涉及无人机设备技术领域。该无人机自主充电平台,通过侧移皮带的传动将无人机旋转或者侧移调整,使得无人机可以实现自主充电,充
一种车载式无人机升降平台系统.pdf
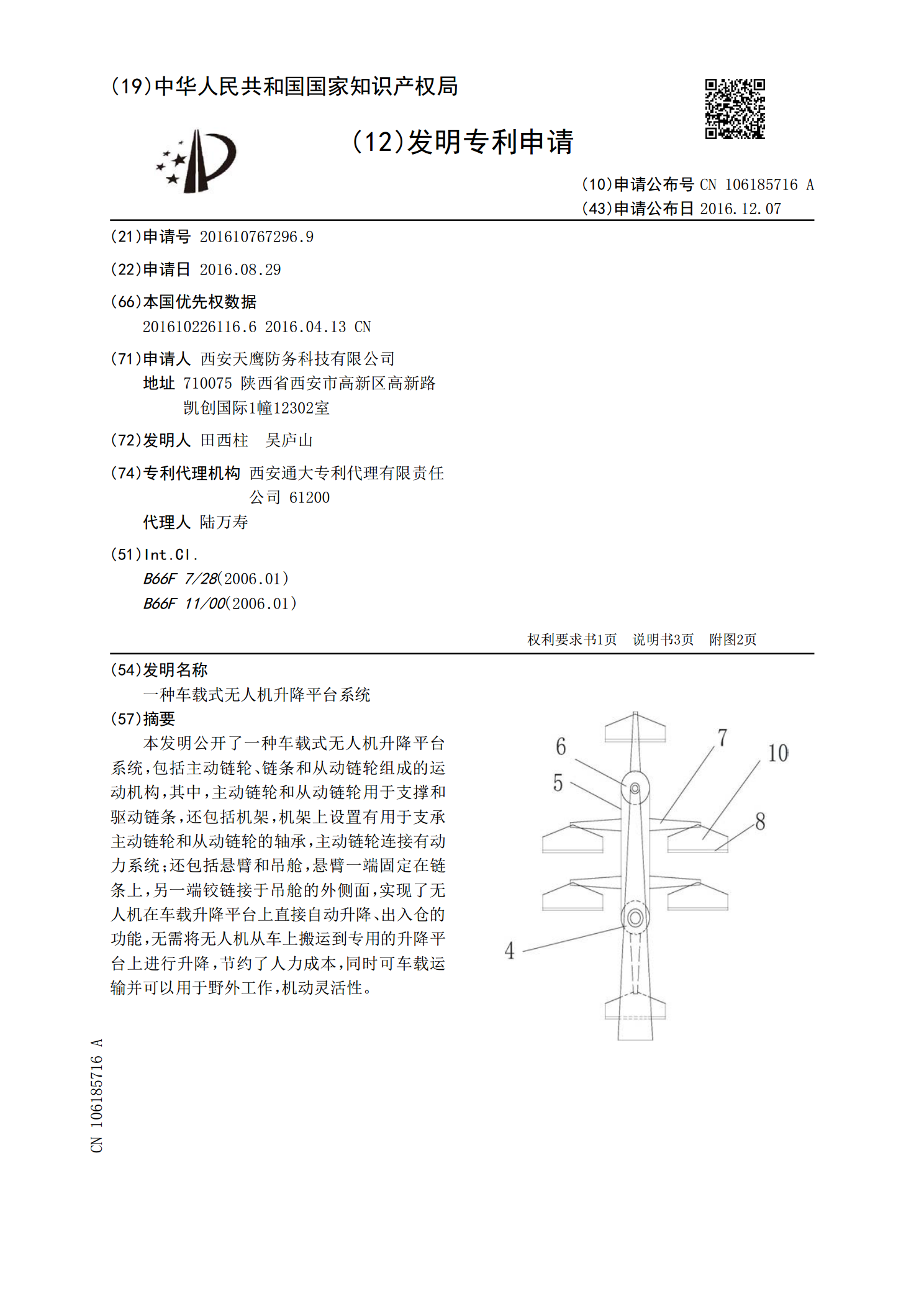
本发明公开了一种车载式无人机升降平台系统,包括主动链轮、链条和从动链轮组成的运动机构,其中,主动链轮和从动链轮用于支撑和驱动链条,还包括机架,机架上设置有用于支承主动链轮和从动链轮的轴承,主动链轮连接有动力系统;还包括悬臂和吊舱,悬臂一端固定在链条上,另一端铰链接于吊舱的外侧面,实现了无人机在车载升降平台上直接自动升降、出入仓的功能,无需将无人机从车上搬运到专用的升降平台上进行升降,节约了人力成本,同时可车载运输并可以用于野外工作,机动灵活性。

一种车载式充电桩.pdf
本发明公开了一种车载式充电桩,包括集风口,集风口通过聚风管连接风洞支架,风洞支架一侧设有进风口,另一侧设有主出风口,机壳通过支撑架安装在风洞支架内,轮毂安装在机壳一侧,轮毂一侧通过风轮轴连接行星齿轮增速箱,发电机通过发电机轴连接行星齿轮增速箱,发电机一侧设有电控箱。本发明与现有技术相比的优点在于:不再局限于固定式充电桩,为电动汽车提供干净稳定的能源供给,结构简单精巧,无易损件,外形美观大方。