
踝关节康复机器人.pdf

猫巷****觅蓉


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

踝关节康复机器人.pdf
本发明公开了一种踝关节康复机器人,包括右侧驱动单元、左侧驱动单元、底部驱动单元、三角支撑架、脚底支撑板、阻尼单元和底板,所述驱动单元和左侧驱动单元位于脚底支撑板两侧,所述右侧驱动单元和左侧驱动单元位于脚底支撑板两侧呈杠杆结构,所述底部驱动单元位于右侧驱动单元、左侧驱动单元、三角支撑架和脚底支撑板的底端的底板上,所述阻尼单元的端部和脚底支撑板的一端相连接。本发明运用直线电机来实现复杂曲线轨迹的驱动技术,使得踝关节两侧直线电机带动人体脚掌完成屈伸和内外翻动作,利用底部的直线电机完成踝关节的内外旋动作,穿戴方便
踝关节康复机器人.pdf
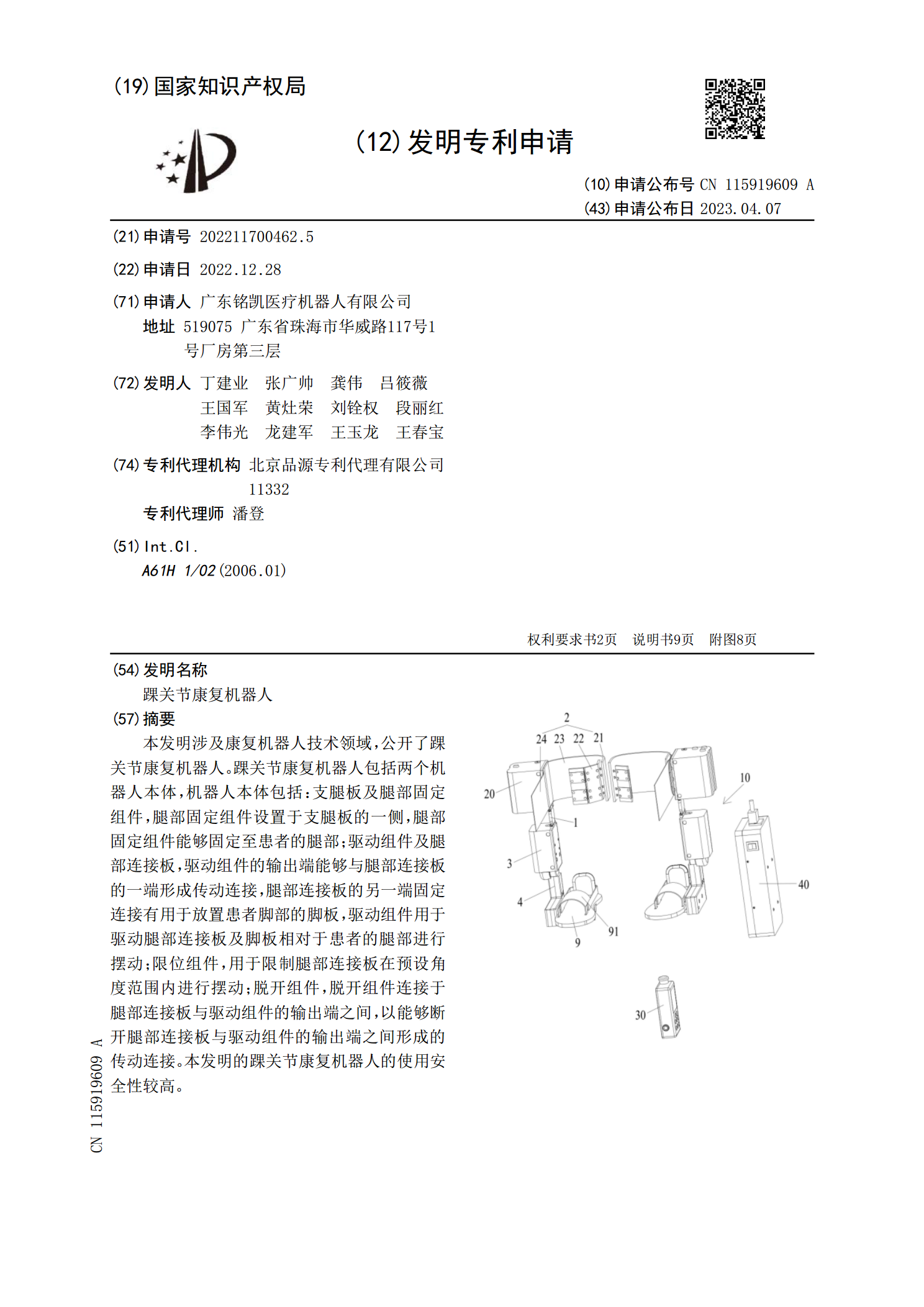
本发明涉及康复机器人技术领域,公开了踝关节康复机器人。踝关节康复机器人包括两个机器人本体,机器人本体包括:支腿板及腿部固定组件,腿部固定组件设置于支腿板的一侧,腿部固定组件能够固定至患者的腿部;驱动组件及腿部连接板,驱动组件的输出端能够与腿部连接板的一端形成传动连接,腿部连接板的另一端固定连接有用于放置患者脚部的脚板,驱动组件用于驱动腿部连接板及脚板相对于患者的腿部进行摆动;限位组件,用于限制腿部连接板在预设角度范围内进行摆动;脱开组件,脱开组件连接于腿部连接板与驱动组件的输出端之间,以能够断开腿部连接板

绳索驱动踝关节康复机器人.pdf
本发明提供一种绳索驱动踝关节康复机器人,包括定平台和动平台。其中定平台起框架支撑作用,4个绳索驱动电动机和旋转驱动电动机固定于其上,可绕垂直轴旋转的绳索过轮保证了绳索方向的随意性;动平台是受刚性约束的绳索牵引平台,具有4个自由度,自由度输出类型为3R1T,其中绳索驱动实现绕矢状轴、冠状轴转动,旋转驱动实现绕垂直轴转动,三个回转副共点,等效出了一个球面副,同时通过滑块导轨实现了移动副的功能。在动平台上脚踏板处引入一个了位置调节装置,用于调整训练者脚掌高度,使机器人等效球面副回转中心与训练者踝关节转动中心相重
柔性绳驱动踝关节康复机器人.pdf
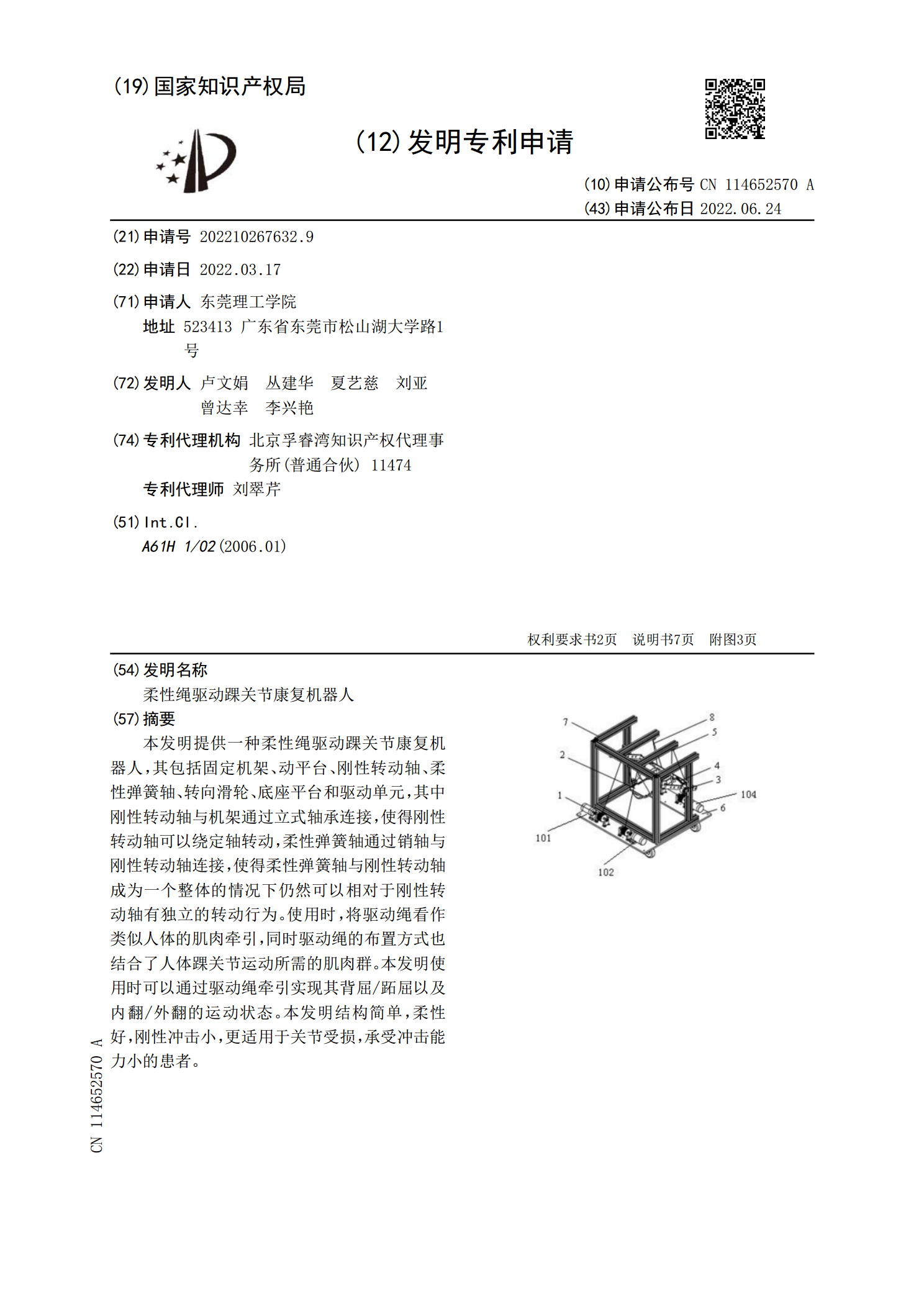
本发明提供一种柔性绳驱动踝关节康复机器人,其包括固定机架、动平台、刚性转动轴、柔性弹簧轴、转向滑轮、底座平台和驱动单元,其中刚性转动轴与机架通过立式轴承连接,使得刚性转动轴可以绕定轴转动,柔性弹簧轴通过销轴与刚性转动轴连接,使得柔性弹簧轴与刚性转动轴成为一个整体的情况下仍然可以相对于刚性转动轴有独立的转动行为。使用时,将驱动绳看作类似人体的肌肉牵引,同时驱动绳的布置方式也结合了人体踝关节运动所需的肌肉群。本发明使用时可以通过驱动绳牵引实现其背屈/跖屈以及内翻/外翻的运动状态。本发明结构简单,柔性好,刚性冲

下肢康复训练机器人踝关节装置.pdf
本发明公开了一种适用于串联结构的下肢康复训练机器人的踝关节装置,属于康复医疗设备领域。本发明踝关节装置实现了三重安全防护即软件控制电机13的速度和运动位置范围、行程开关2和机械限位销1也都限定了踝关节电机13的安全极限运动范围。踝关节电机13置于足部箱体11和19内,通过同步带轮3和15传递运动,并有同步带张紧机构16。踝关节支架14固定在踝关节内外护板4和18上,足部踏板19可以绕踝关节支架14的B位置的销轴做相对转动,通过压力传感器7和9实现了足部正反双向扭矩的数据测量。传感器套6、8和10可分别预紧