
受扰四旋翼无人机姿态与高度系统的非线性鲁棒控制方法.pdf

玉军****la

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

受扰四旋翼无人机姿态与高度系统的非线性鲁棒控制方法.pdf
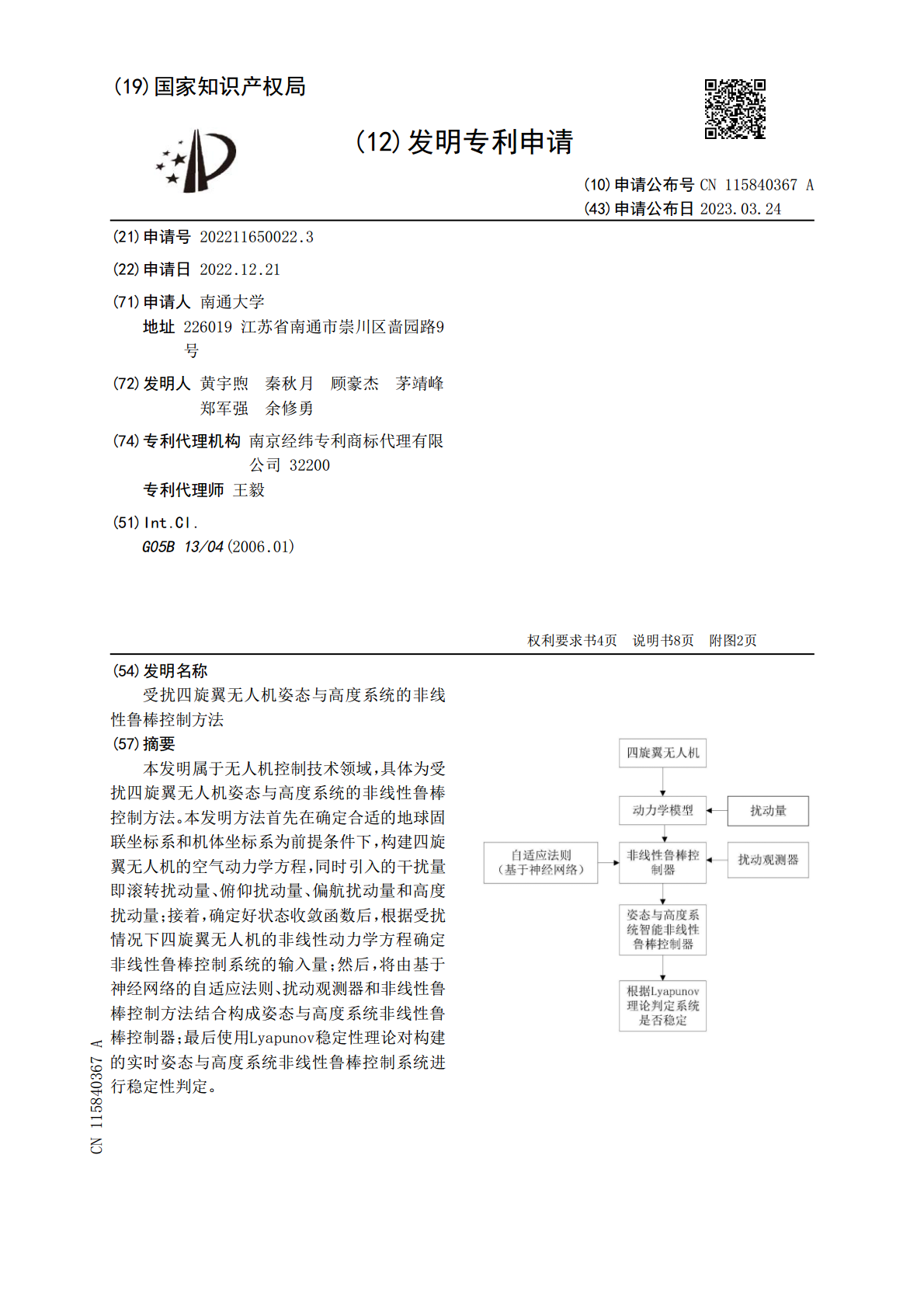
本发明属于无人机控制技术领域,具体为受扰四旋翼无人机姿态与高度系统的非线性鲁棒控制方法。本发明方法首先在确定合适的地球固联坐标系和机体坐标系为前提条件下,构建四旋翼无人机的空气动力学方程,同时引入的干扰量即滚转扰动量、俯仰扰动量、偏航扰动量和高度扰动量;接着,确定好状态收敛函数后,根据受扰情况下四旋翼无人机的非线性动力学方程确定非线性鲁棒控制系统的输入量;然后,将由基于神经网络的自适应法则、扰动观测器和非线性鲁棒控制方法结合构成姿态与高度系统非线性鲁棒控制器;最后使用Lyapunov稳定性理论对构建的实时
基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法.pdf
本发明公开了一种基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,构建串级控制器对四旋翼无人机的姿态进行控制,所述串级控制器为内外环两级串级控制器,串级控制器的外环进行自抗扰控制,向内环输出期望姿态角,内环进行快速终端滑模控制,向飞行器输出姿态角变化量,飞行器根据姿态角变化量改变飞行姿态。本发明公开的基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,抗干扰能力强,具有更快的跟踪速度和鲁棒性。
基于轴角矢量的多旋翼姿态自抗扰控制方法及系统.pdf
本发明涉及一种基于轴角矢量的多旋翼姿态自抗扰控制方法及系统,包括以下步骤:基于预先得到的机体目标姿态角、机体当前姿态角,获取三轴的目标角速度;获取当前机体角速度,估计当前角加速度和扰动量,并基于所述目标角速度向量获取最终的姿态控制量。本发明将姿态运动视为一种空间内基于旋转矢量的旋转运动,通过目标角速度、当前机体角速度,并估计当前角加速度和扰动量,得到最终的姿态控制量,克服了丢失控制精度的问题。同时引入扰动量,从而具有自抗扰功能,以提高姿态的响应速度和控制器的适应性。
基于轴角矢量的多旋翼姿态自抗扰控制方法及系统.pdf
本发明涉及一种基于轴角矢量的多旋翼姿态自抗扰控制方法及系统,包括以下步骤:基于预先得到的机体目标姿态角、机体当前姿态角,获取三轴的目标角速度;获取当前机体角速度,估计当前角加速度和扰动量,并基于所述目标角速度向量获取最终的姿态控制量。本发明将姿态运动视为一种空间内基于旋转矢量的旋转运动,通过目标角速度、当前机体角速度,并估计当前角加速度和扰动量,得到最终的姿态控制量,克服了丢失控制精度的问题。同时引入扰动量,从而具有自抗扰功能,以提高姿态的响应速度和控制器的适应性。

一种用于旋翼无人机姿态模拟系统及方法.pdf
本发明属于无人机仿真/测试装置技术领域,公开了一种用于旋翼无人机姿态模拟系统及方法;设置有:回转内环;回转内环通过螺栓与支撑装置连接,回转内环位于回转外环内部,回转内环与回转外环组成类似轴承的结构,可以相对转动;回转外环通过螺栓与转动装置底座通过螺钉连接,V型滑轮通过固定螺钉固定在转动装置底座,导轨座上下两侧均固定有V型滑轮,用于夹持导轨座。本发明可以实现旋翼无人机三个旋转自由度的模拟,且三个自由度的转动中心相重合,即实现无人机的偏航、俯仰、翻转三种飞行姿态的模拟。三个旋转自由度的运动模拟通过三个转动装置