
一种移动装置行走结构及行走方法.pdf

秋花****姐姐


1/8

2/8

3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种移动装置行走结构及行走方法.pdf
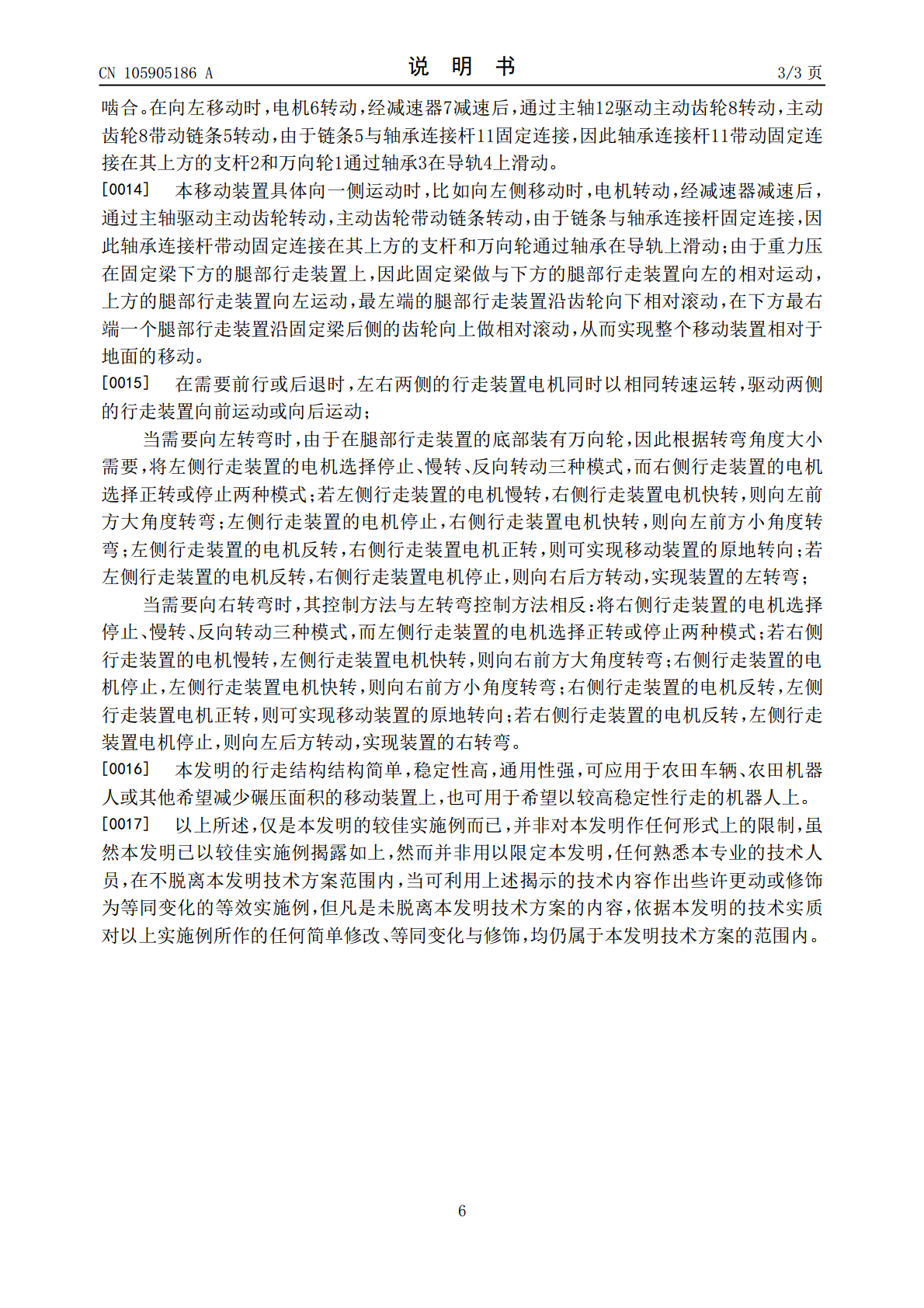
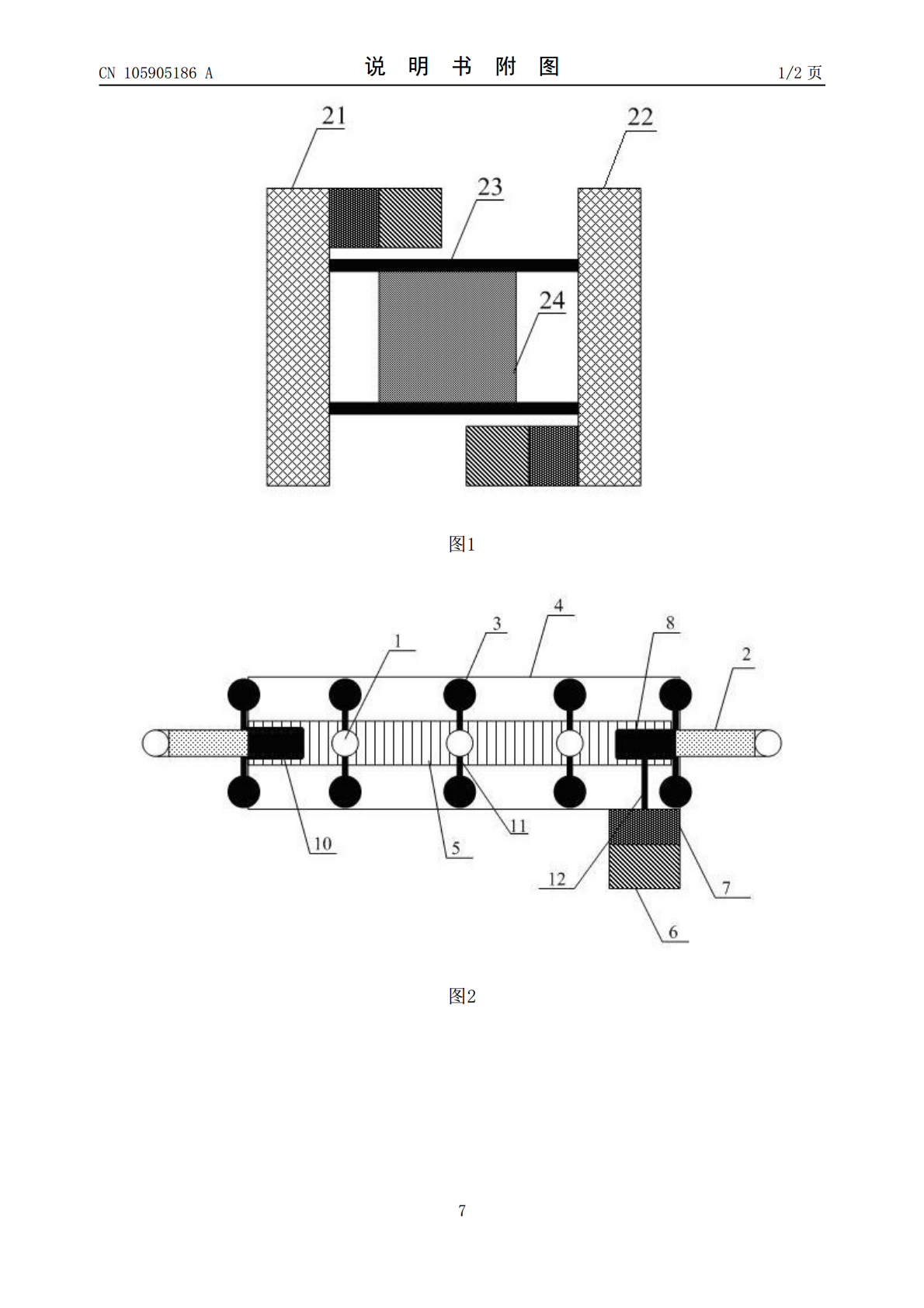
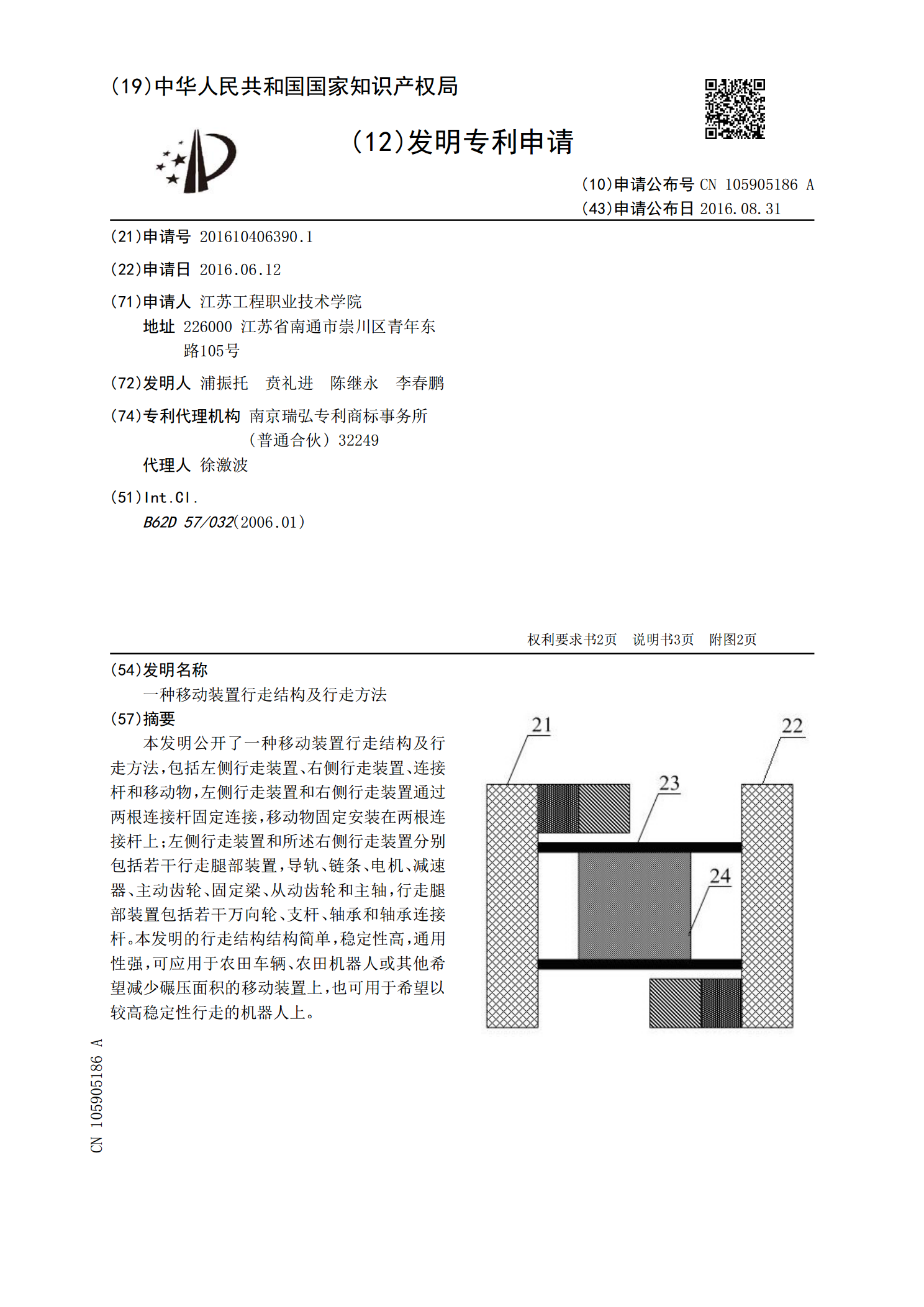
本发明公开了一种移动装置行走结构及行走方法,包括左侧行走装置、右侧行走装置、连接杆和移动物,左侧行走装置和右侧行走装置通过两根连接杆固定连接,移动物固定安装在两根连接杆上;左侧行走装置和所述右侧行走装置分别包括若干行走腿部装置,导轨、链条、电机、减速器、主动齿轮、固定梁、从动齿轮和主轴,行走腿部装置包括若干万向轮、支杆、轴承和轴承连接杆。本发明的行走结构结构简单,稳定性高,通用性强,可应用于农田车辆、农田机器人或其他希望减少碾压面积的移动装置上,也可用于希望以较高稳定性行走的机器人上。
一种基于餐厅悬空轨道的行走结构及行走控制方法.pdf
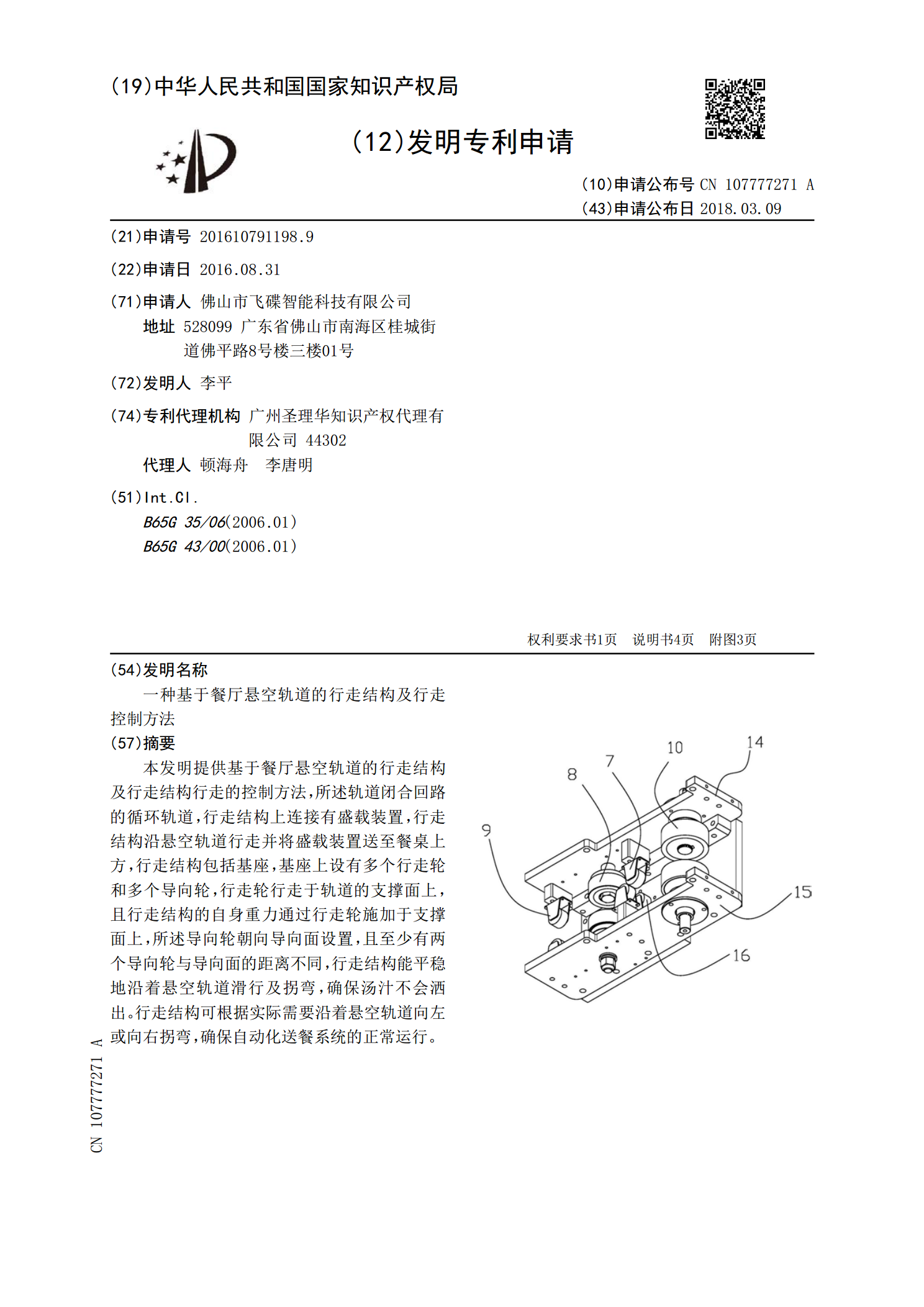
本发明提供基于餐厅悬空轨道的行走结构及行走结构行走的控制方法,所述轨道闭合回路的循环轨道,行走结构上连接有盛载装置,行走结构沿悬空轨道行走并将盛载装置送至餐桌上方,行走结构包括基座,基座上设有多个行走轮和多个导向轮,行走轮行走于轨道的支撑面上,且行走结构的自身重力通过行走轮施加于支撑面上,所述导向轮朝向导向面设置,且至少有两个导向轮与导向面的距离不同,行走结构能平稳地沿着悬空轨道滑行及拐弯,确保汤汁不会洒出。行走结构可根据实际需要沿着悬空轨道向左或向右拐弯,确保自动化送餐系统的正常运行。

一种自行走装置的行走控制方法及自行走装置.pdf
一种自行走装置的行走控制方法及自行走装置。本发明在现有的自行走装置中增加简单的判断机制,通过统计所述自行走装置沿同一方向运行的时间t和距离I,在所述时间t达到时长阈值和/或所述距离I达到距离阈值时,控制所述自行走装置转向,避免自行走装置无效的朝同一方向运转,盲目的切割同一位置或同一方向的草坪。本发明能够在不增加传感设备,不增加硬件成本,不改变电路架构的同时,通过简单的控制,以最小的运算开销将现有自行走装置从错误的行走路径中纠正至正确的行走方向。

一种自行走的煤矿巷道临时支护结构及自行走的方法.pdf
本发明公开了一种自行走的煤矿巷道临时支护结构,属于煤矿开采支护设备领域;它包括数目不少于4组的门型支腿组;门型支腿组呈顺序依次排列,且每个门型支腿组均能够沿竖直方向进行伸缩;在门型支腿组的上顶部设置有若干个承压纵梁;每个承压纵梁的长度至少需要跨过三组门型支腿组;在中部的门型支腿组之间还设置有行走液压千斤顶;本发明能够保证至少有一组液压支架对采煤工作面的顶部进行支护,解决了使用传统的液压支架及作业方法在采煤工作面安装耗时过长,进而造成采煤工作面巷道坍塌和采煤效率低的问题。

钢结构自动行走挂载机器人及其行走方法.pdf
本发明公开了一种钢结构自动行走挂载机器人及其行走方法,包括:主体部;挂载部,安装于导向槽轮主体部上,导向槽轮挂载部适于搭载作业设备;行走部,包括沿前后方向排列的前行走脚和后行走脚,导向槽轮前行走脚和导向槽轮后行走脚择一安装于导向槽轮主体部上,另一与导向槽轮主体部沿前后方向滑动连接,导向槽轮前行走脚和导向槽轮后行走脚均包括电磁铁,导向槽轮电磁铁适于在通电时吸附于钢结构的表面并在断电时脱离导向槽轮钢结构的表面。本机器人巧妙地应用钢结构自身的导磁性,电磁铁能够在通电时吸附于钢结构的表面,能实现本机器人的自动行走