
一种多自由度的亚跨超声速风洞大攻角机构.pdf

是你****松呀


1/9
2/9
3/9
4/9

5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多自由度的亚跨超声速风洞大攻角机构.pdf
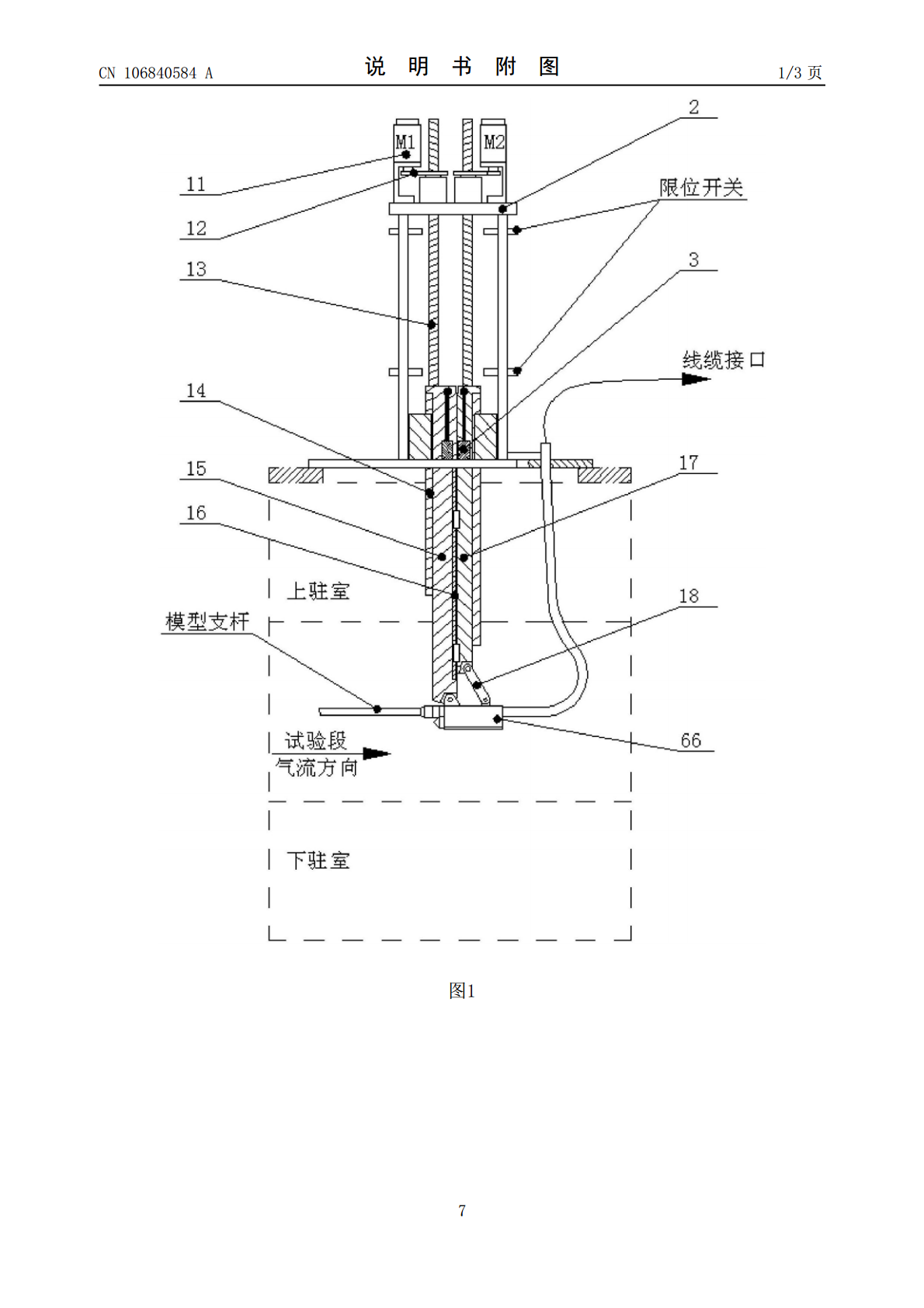
一种多自由度的亚跨超声速风洞大攻角机构,框架为整个机构的安装基础;所述的前臂组件和后臂组件组成结构相同,均包括伺服电机、齿轮副、滚珠丝杠、滚动导轨及相应的臂;滚动导轨的滑块固连在框架上,前臂、后臂分别与其对应组件中的滚动导轨固连,伺服电机、齿轮副、滚珠丝杠和滚动导轨形成的直线运动机构带动前后臂上下运动,前臂的下端通过铰链轴与模型支杆座连接,后臂的下端与小臂一端铰接,小臂的另一端与模型支杆座铰接;试验时,根据待试验攻角,控制两台伺服电机分别转动带动前臂和后臂上下运动,当前臂和后臂的上下运动速度一致时,实现模
一种具有平移功能的亚跨超声速风洞大攻角机构.pdf
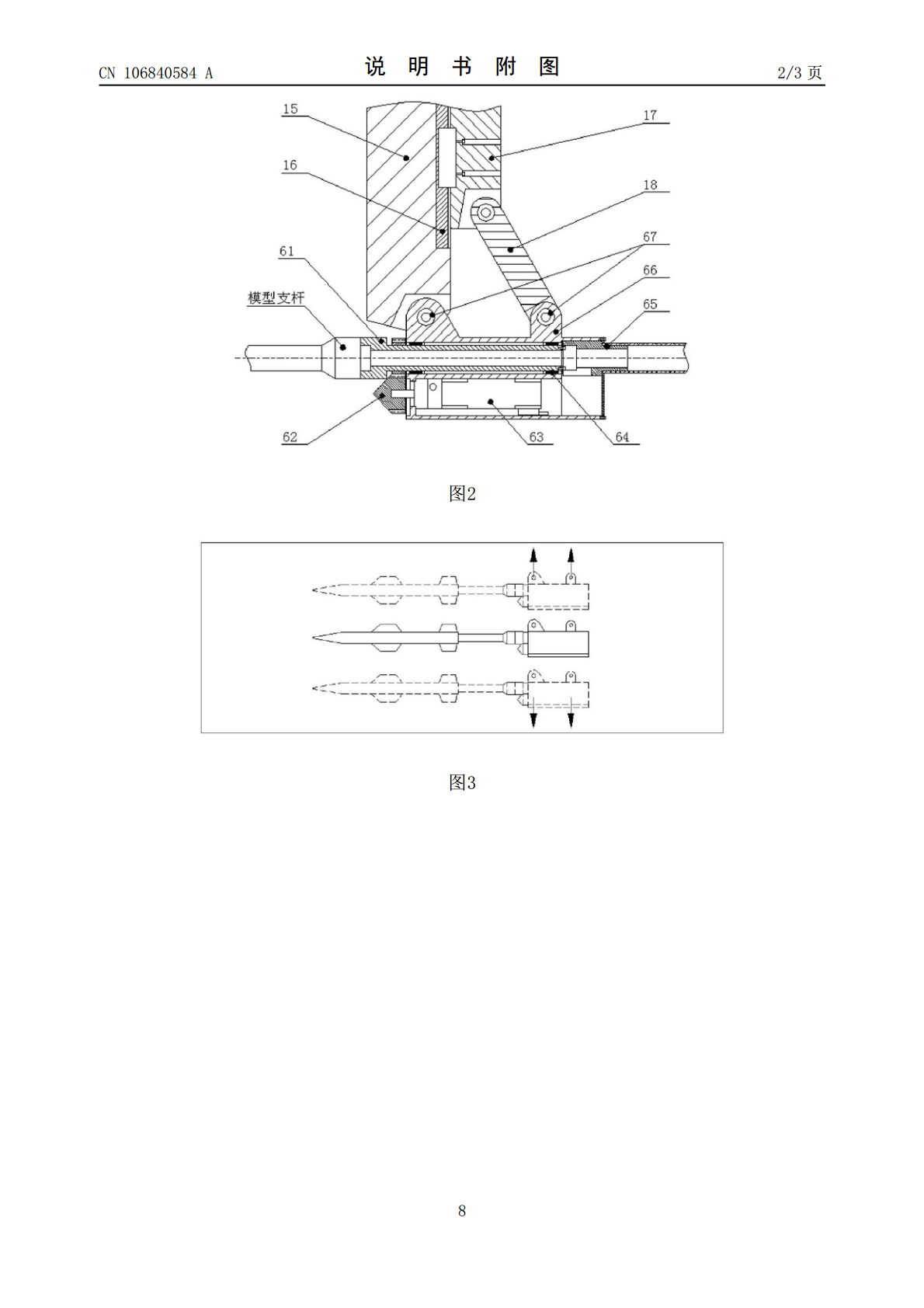
一种具有平移功能的亚跨超声速风洞大攻角机构,大攻角组件采用铰链形式通过转轴与模型支杆座连接,为模型支杆前端连接的模型提供试验攻角;所述的平移组件包括上端框、滚珠光杠、滚珠丝杠、活动端框、伺服电机、齿轮副、下端框、位置传感器;两个滚珠光杠的光杠轴两端固连在上端框和下端框上,滚珠光杠的直线轴承安装在活动端框上,滚珠丝杠的丝杠轴两端安装在上端框和下端框上且连接端能够相互转动,滚珠丝杠的丝母安装在活动端框上,伺服电机驱动齿轮副带动丝杠轴转动从而驱动丝母平移进而带动活动端框上下移动,活动端框带动大攻角组件上下移动;

一种亚跨超声速风洞90°大攻角装置.pdf
本发明公开了一种亚跨超声速风洞90°大攻角装置,包括下底板、限位器,立柱、上底板、伺服电机减速机组件、主输出齿轮、大直径齿轮、主丝杠组件、辅丝杠组件、小直径齿轮、竖直锥齿轮组件、水平锥齿轮组件、配重组件、辅丝杠转接头组件、主丝杠转接头组件、拉杆、油杯、拉线传感器组件、密封板、管线组件、支臂、连杆、管接头组件、支撑段、天平模型支杆组件、直线导轨、滑块支座组件、假支杆。本专利结构合理简单,安装方便,精度高,阻塞度小,试验模型大,试验效率高,成本低,实现攻角范围大,能够满足风洞连续走90°甚至120°大范围攻角

多自由度风洞大攻角装置.pdf
本发明公开了一种多自由度风洞大攻角装置,包括:横移机构、偏航机构、攻角机构、主框架、上框架、主支杆、尾支杆、支杆连接杆和第一升降机;其中,所述横移机构位于底部;所述偏航机构与所述横移机构相连接;所述攻角机构与所述偏航机构相连接;所述主框架与所述攻角机构相连接;所述上框架与所述主框架相连接;所述主支杆和所述尾支杆安装在所述攻角机构上;所述支杆连接杆将所述主支杆和所述尾支杆相连接;所述第一升降机与所述主框架相连接。本发明能够使模型实现上下、左右两个自由度的平移运动和俯仰、偏航两个自由度的旋转运动,并能实现位置
一种亚跨超风洞90°大攻角耦合360°滚转装置.pdf
本发明公开了一种亚跨超风洞90°大攻角耦合360°滚转装置,包括底板、限位器,立柱、上底板、伺服电机减速机组件、主输出齿轮、大直径齿轮、主丝杠组件、辅丝杠组件、小直径齿轮、竖直锥齿轮组件、水平锥齿轮组件、配重组件、辅丝杠转接头组件、主丝杠转接头组件、拉杆、油杯、拉线传感器、密封板、管线组件、支臂、连杆、管接头组件、支撑段组件、假支杆、直线导轨和滑块支座组件。本发明利用偏心曲柄滑块机构的逆运动能够连续精确实现‑15°~90°甚至120°的大范围的攻角范围。1.2m量级风洞模型长度可达800mm,阻塞度≤3%