
一种新型机械手.pdf

一只****ng

1/9

2/9
3/9
4/9

5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型机械手.pdf
本发明提供了一种新型机械手,其包括底座、立柱、支撑座、臂体、齿轮、运动机构和夹持机构;立柱竖直安装在底座上;支撑座安装在立柱上;臂体安装在支撑座上;齿轮与立柱上端刚性连接;运动机构安装在臂体上;夹持机构安装在臂体上。本发明驱动简单,动作迅速,大大提高生产效率;并且结构简单,制造成本便宜。
一种新型机械手.pdf
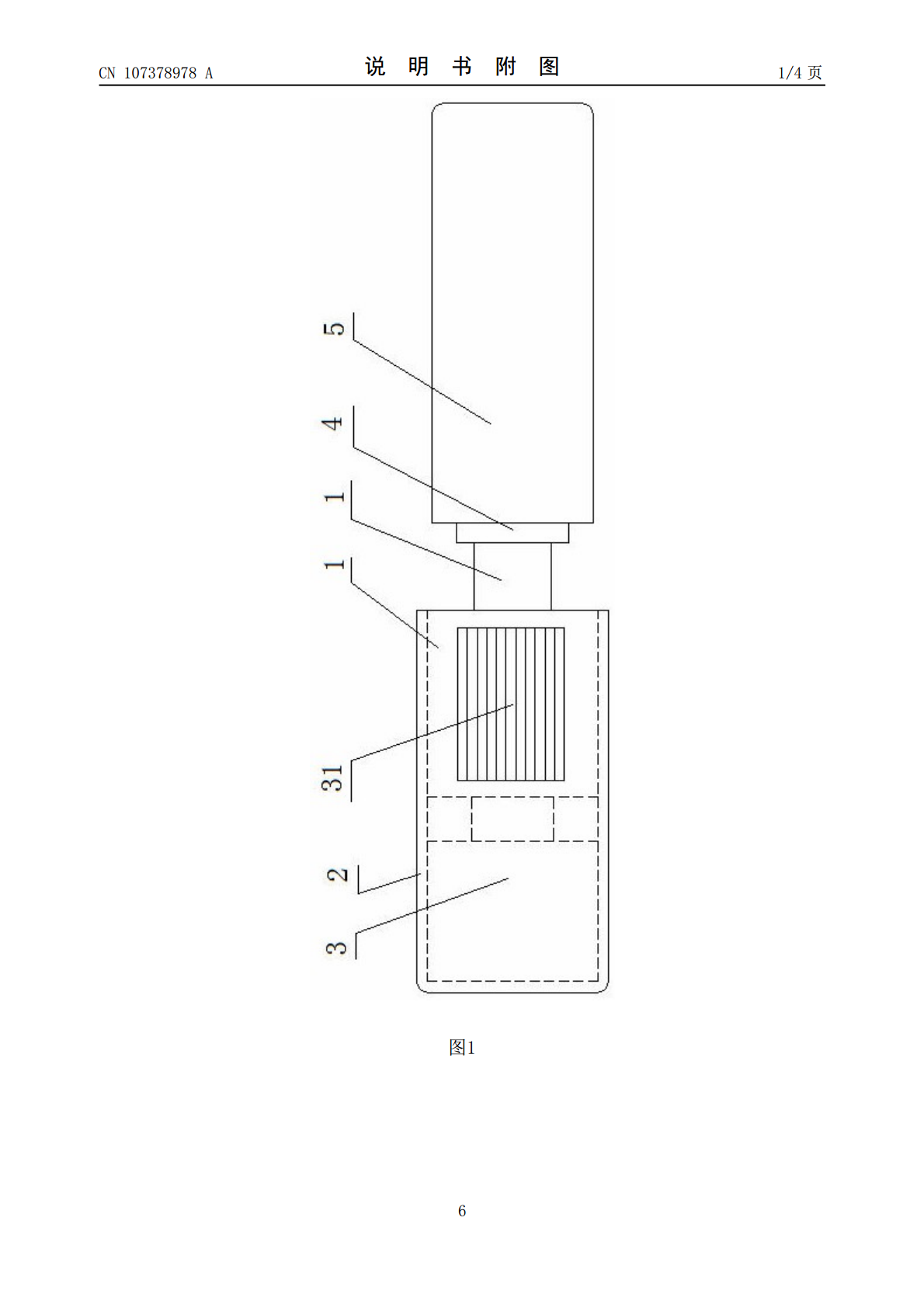
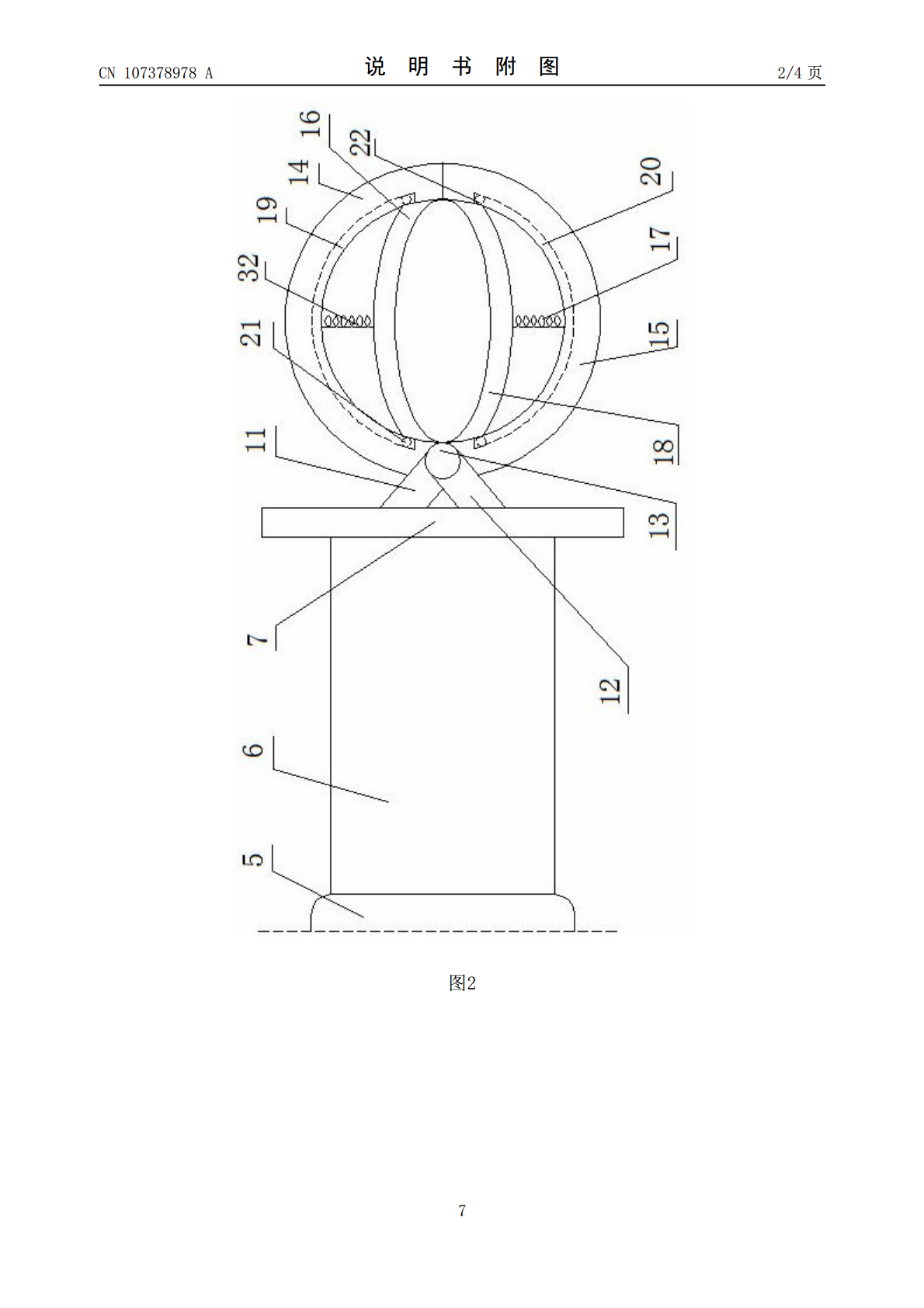
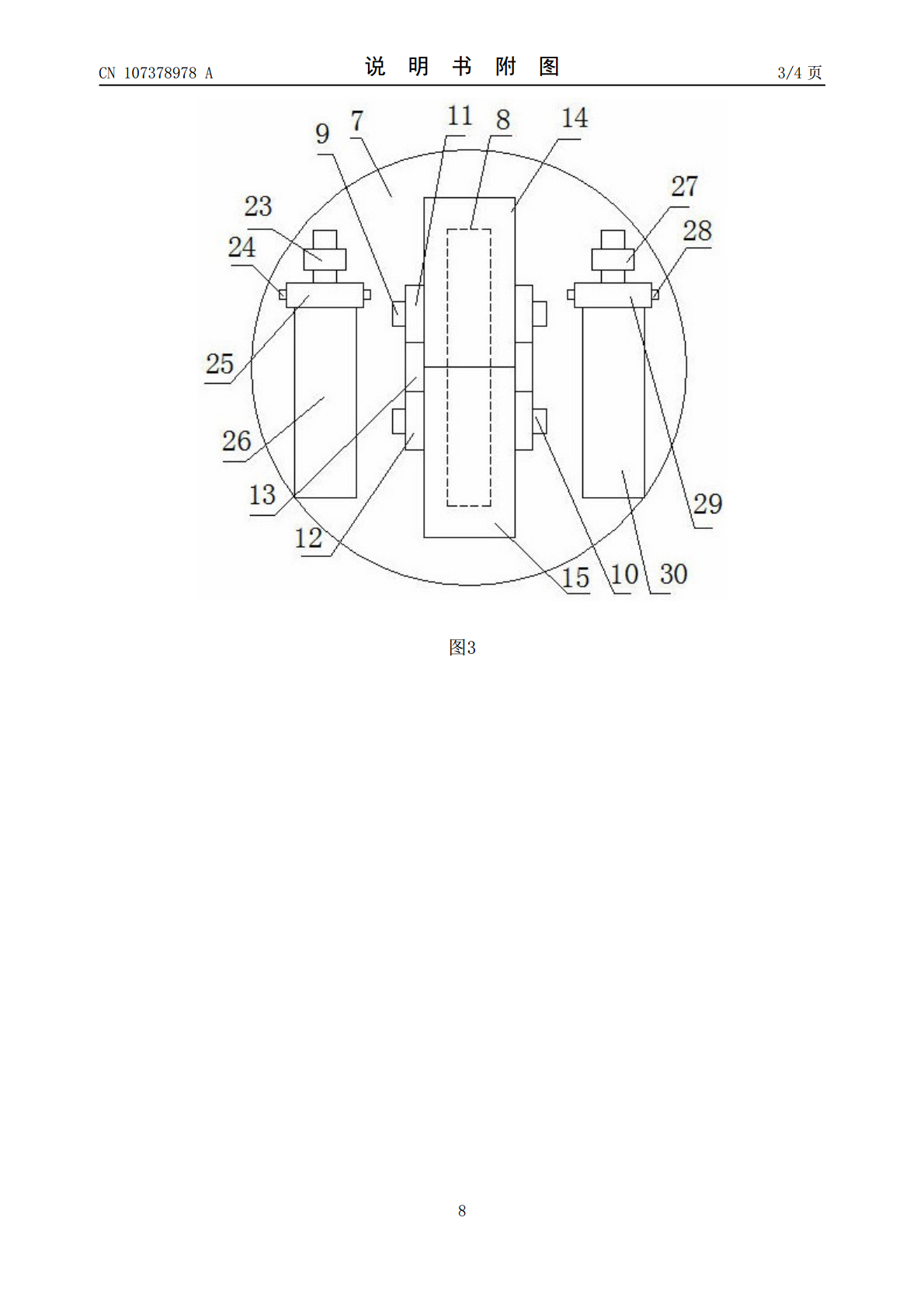
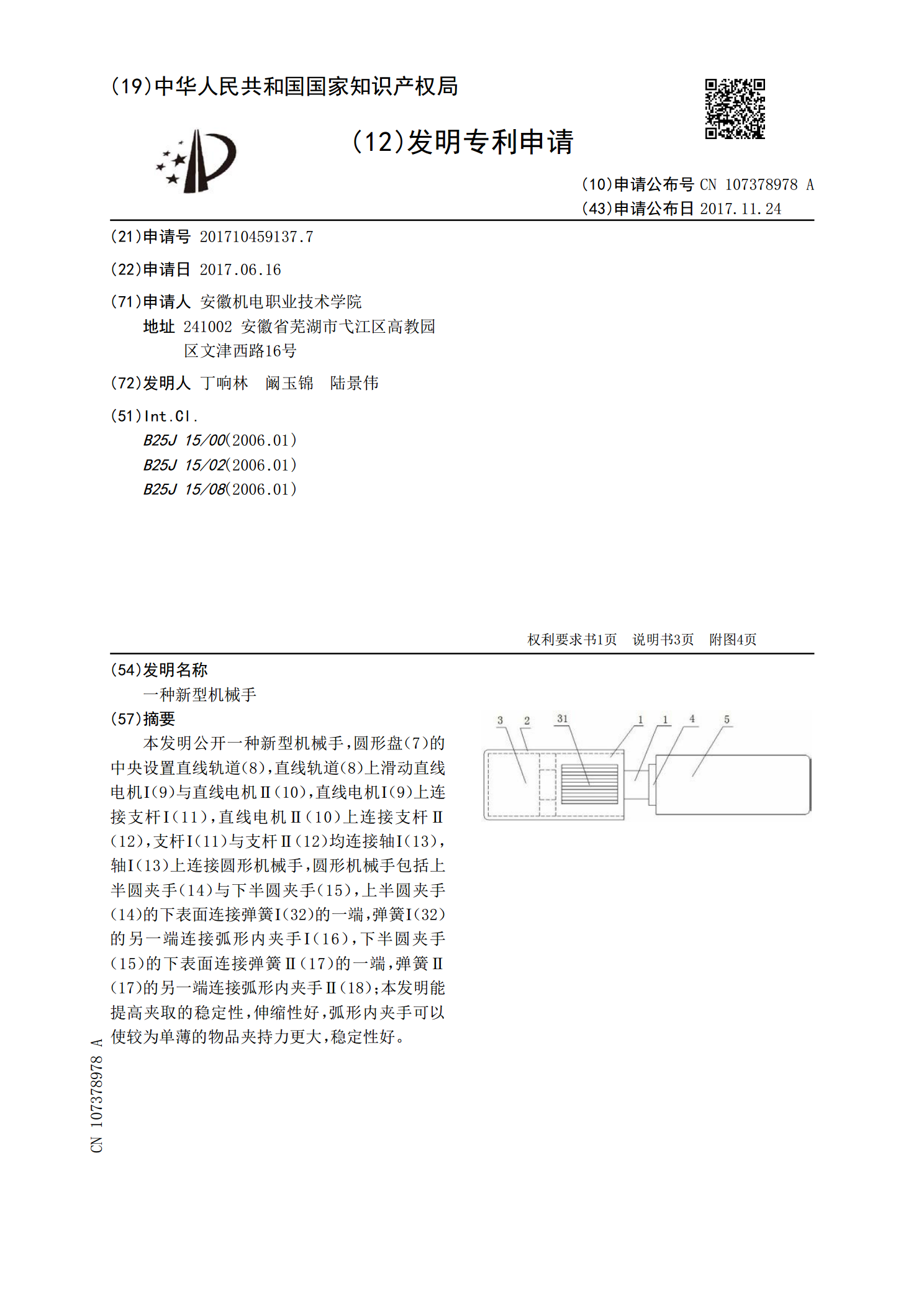
本发明公开一种新型机械手,圆形盘(7)的中央设置直线轨道(8),直线轨道(8)上滑动直线电机Ⅰ(9)与直线电机Ⅱ(10),直线电机Ⅰ(9)上连接支杆Ⅰ(11),直线电机Ⅱ(10)上连接支杆Ⅱ(12),支杆Ⅰ(11)与支杆Ⅱ(12)均连接轴Ⅰ(13),轴Ⅰ(13)上连接圆形机械手,圆形机械手包括上半圆夹手(14)与下半圆夹手(15),上半圆夹手(14)的下表面连接弹簧Ⅰ(32)的一端,弹簧Ⅰ(32)的另一端连接弧形内夹手Ⅰ(16),下半圆夹手(15)的下表面连接弹簧Ⅱ(17)的一端,弹簧Ⅱ(17)的另一端连

一种新型机械手.pdf
本发明公开了一种新型机械手,包括底座、支腿、防护围栏、液压杆和滑轮,所述底座的底端安装有支腿,所述底座的底端边缘处安装有防护围栏,所述防护围栏的一端安装有围栏门,所述底座顶端的中部安装有竖杆,所述竖杆的顶端安装有横臂,所述横臂的一端安装有配重块,所述横臂的另一端安装有机械臂,所述机械臂的一端安装有挂钩,所述机械臂的一侧安装有操控面板,所述操控面板的一侧安装有上下操控按钮,所述支腿的内部开设有凹槽,所述凹槽的内部安装有液压杆,所述液压杆的一端安装有滑轮,本发明具有移动方便,且工作时稳定性高,同时具有很好的保

一种新型机械手.pdf
本发明涉及一种新型机械手。包括气缸,所述气缸前端设有双面齿条,双面齿条两边各设有齿指,齿指尾端设有与双面齿条相啮合的半圆齿,一齿指上设有液压缓冲器位于两齿指之间。本发明结构简单,由于在齿指之间设有液压缓冲器,使得机械手抓拿物品更稳定。
一种新型机械手.pdf
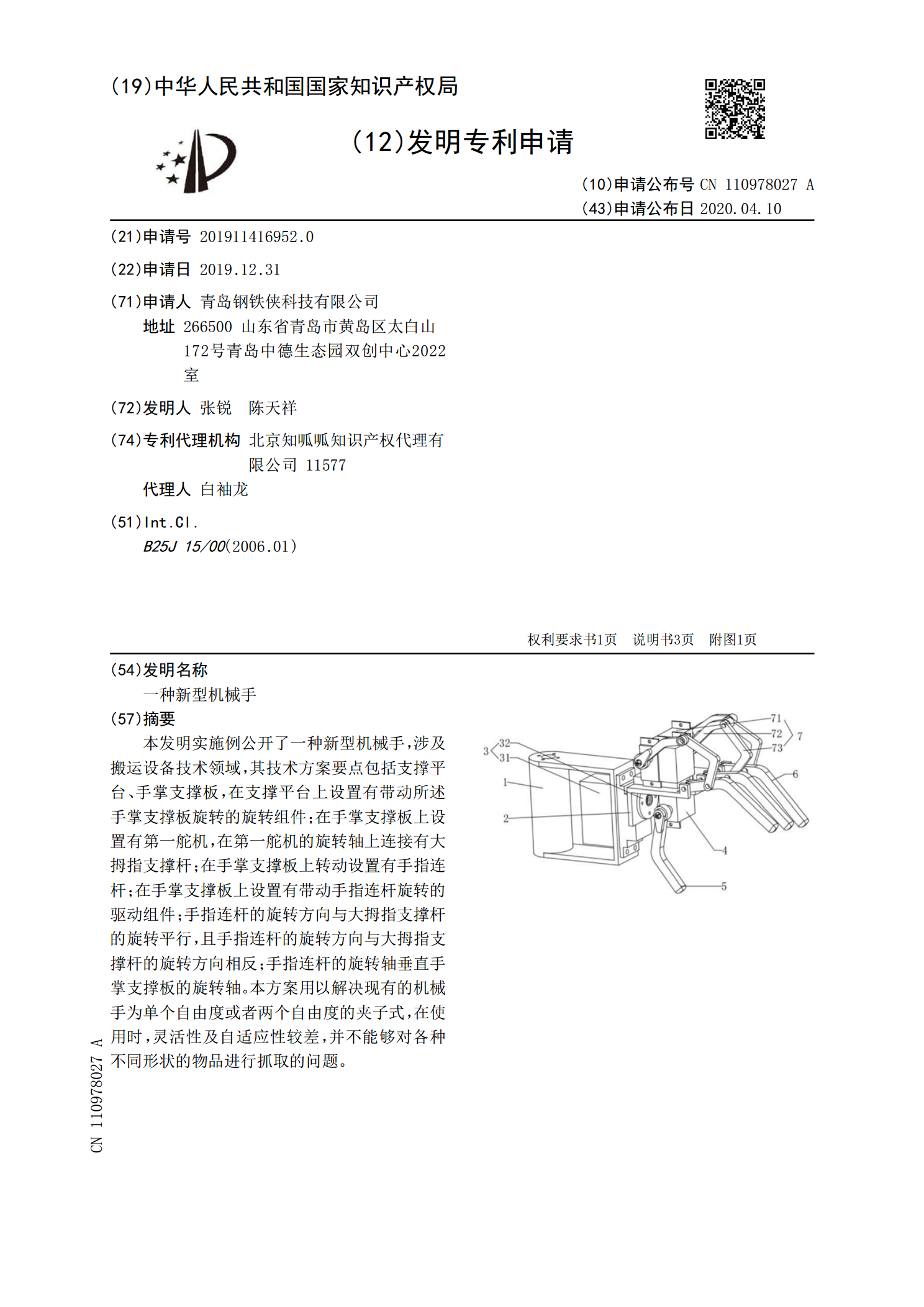
本发明实施例公开了一种新型机械手,涉及搬运设备技术领域,其技术方案要点包括支撑平台、手掌支撑板,在支撑平台上设置有带动所述手掌支撑板旋转的旋转组件;在手掌支撑板上设置有第一舵机,在第一舵机的旋转轴上连接有大拇指支撑杆;在手掌支撑板上转动设置有手指连杆;在手掌支撑板上设置有带动手指连杆旋转的驱动组件;手指连杆的旋转方向与大拇指支撑杆的旋转平行,且手指连杆的旋转方向与大拇指支撑杆的旋转方向相反;手指连杆的旋转轴垂直手掌支撑板的旋转轴。本方案用以解决现有的机械手为单个自由度或者两个自由度的夹子式,在使用时,灵活