
一种水面飞行器抗浪能力的全机无动力模型水池试验方法.pdf

一只****ua


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种水面飞行器抗浪能力的全机无动力模型水池试验方法.pdf
一种水面飞行器抗浪能力的全机无动力模型水池试验方法,试验步骤如下:a)全机动力模型试验安装:将全机无动力模型(1)通过滑动装置安装在水动力高速试验拖车系统(12)下方的适航仪(8)上,该滑动装置保证全机动力模型(1)能在一定范围内上下以及沿适航仪(8)前后自由运动,重心支杆(7)与全机无动力模型(1)活动连接,重心支杆(7)与全机无动力模型(1)的活动连接点应取全机无动力模型(1)重心位置点,并采用铰链铰接,则全机无动力模型(1)能绕重心位置点自由俯仰转动,本发明优点是:该方法实用、可行、操作简单,试验结

水面飞行器抗浪能力的全机无动力模型水池试验装置.pdf
水面飞行器抗浪能力的全机无动力模型水池试验装置,包括高速试验拖车系统本体(21),它包括全机无动力模型(22)、重心连接杆(1)、小滑车(2)、导向轮组件、深沉杆(3)、中部卸载装置、尾部卸载装置、适航仪(14)、前牵引装置和后牵引装置,深沉杆(3)的底部通过重心连接杆(1)与全机无动力模型(22)相连,小滑车(2)上设有深沉杆通过孔;该试验装置可以实现模型的俯仰和深沉运动,用于测量模型在试验过程中飞行姿态角度的变化及吃水深度的变化情况。中部卸载装置及尾部卸载装置真实模拟了飞机螺旋桨运动对飞机飞行过程产生

一种水面飞行器模型水池试验气动升力模拟装置.pdf
本发明属于水面飞行器模型水池试验技术领域,涉及一种水面飞行器模型水池试验气动升力模拟装置。本发明设计的气动升力模拟装置,是利用弹力绳的形变拉力来模拟气动升力,消除了卸载砝码剧烈晃动带来的影响。由于波浪试验中,模型深沉变化较大,从而造成了弹力绳的长度变化,为了尽可能增加气动升力模拟精度,该装置中选择弹性系数小的弹力绳,并利用多个滑轮使弹力绳总长更长,从而保证深沉变化量引起的拉力变化更微弱,从而保证试验模型在整个试验过程中受到稳定的模拟气动升力。
一种前置式水面飞行器快速性全机动力模型试验方法.pdf
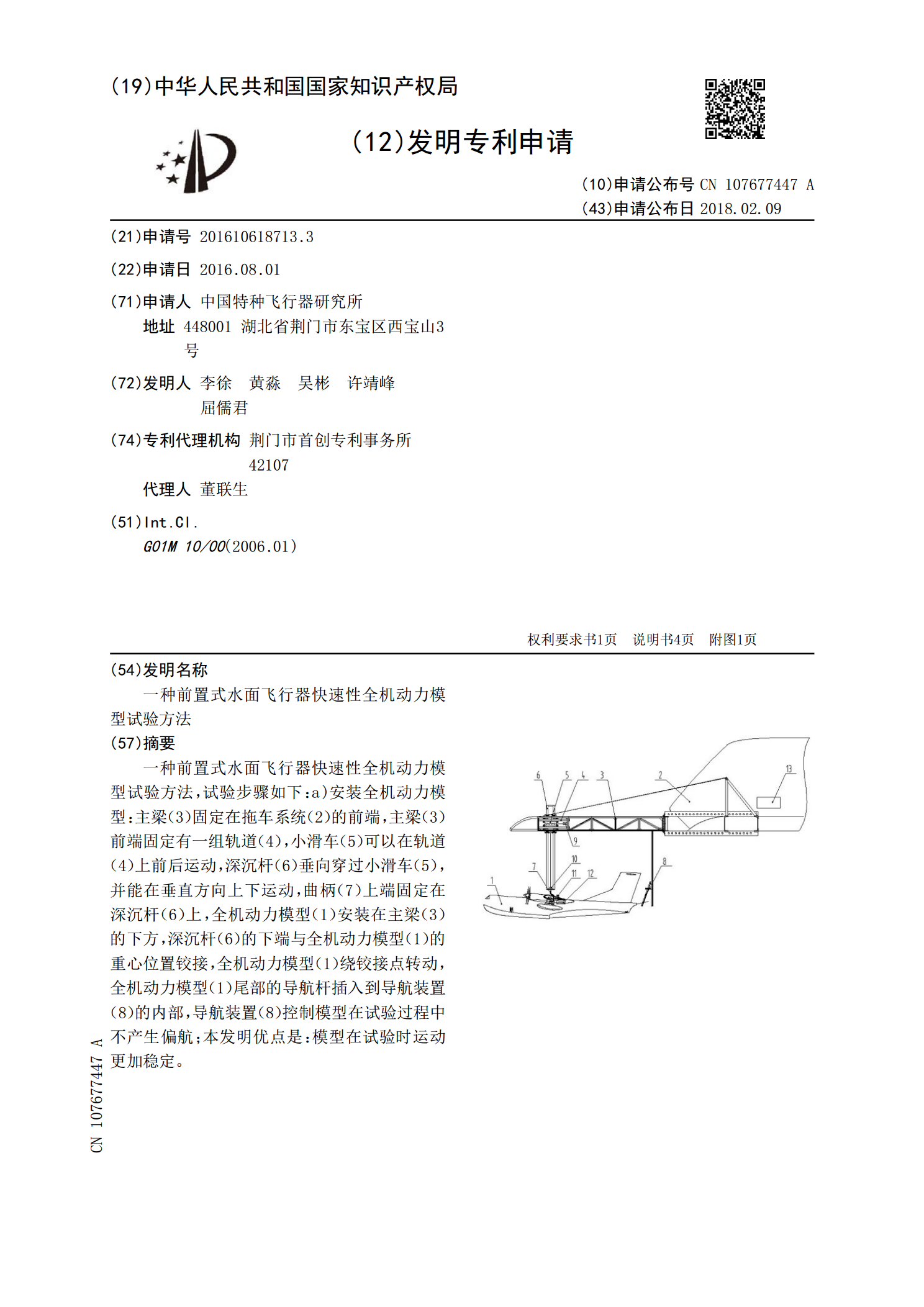
一种前置式水面飞行器快速性全机动力模型试验方法,试验步骤如下:a)安装全机动力模型:主梁(3)固定在拖车系统(2)的前端,主梁(3)前端固定有一组轨道(4),小滑车(5)可以在轨道(4)上前后运动,深沉杆(6)垂向穿过小滑车(5),并能在垂直方向上下运动,曲柄(7)上端固定在深沉杆(6)上,全机动力模型(1)安装在主梁(3)的下方,深沉杆(6)的下端与全机动力模型(1)的重心位置铰接,全机动力模型(1)绕铰接点转动,全机动力模型(1)尾部的导航杆插入到导航装置(8)的内部,导航装置(8)控制模型在试验过程

一种直升机水面漂浮特性试验模型.pdf
本发明属于旋翼航空器水上迫降试验领域,具体涉及一种直升机水面漂浮特性试验模型,所述直升机机身模型(1)表面为高强薄壁蒙皮结构(5),内部设置有结构加强用横向隔框(6)以及纵向加强桁条(7),在直升机机身模型(1)内部还设置有密闭燃油箱(8);所述起落架模拟装置(2)通过直升机机身模型(1)下腹部高强薄壁蒙皮结构(5)上预留的孔位与直升机机身模型(1)实现固结;所述缩比旋翼(4)安装于直升机机身模型(1)顶端;所述便携拆装式柔性浮囊结构(3)通过起落架模拟装置(2)上的预留孔槽与起落架固定。