
一种基于类别最优匹配的多目标跟踪方法及装置.pdf

书生****写意

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于类别最优匹配的多目标跟踪方法及装置.pdf
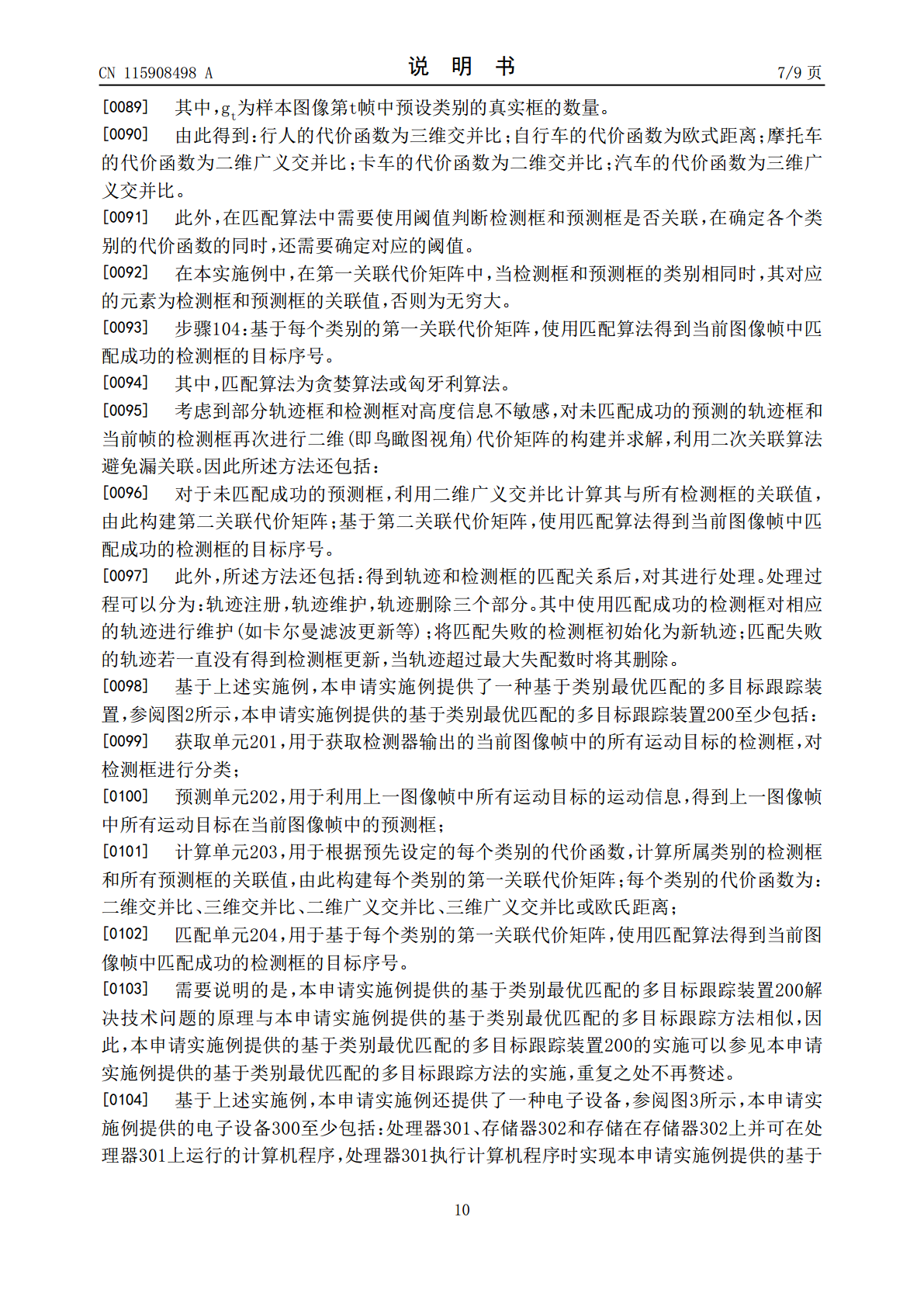
本申请提供了一种基于类别最优匹配的多目标跟踪方法及装置,涉及智能驾驶技术领域,所述方法包括:获取检测器输出的当前图像帧中的所有运动目标的检测框,对检测框进行分类;利用上一图像帧中所有运动目标的运动信息,得到上一图像帧中所有运动目标在当前图像帧中的预测框;根据预先设定的每个类别的代价函数,计算所属类别的检测框和所有预测框的关联值,由此构建每个类别的第一关联代价矩阵;每个类别的代价函数为:二维交并比、三维交并比、二维广义交并比、三维广义交并比或欧氏距离;基于每个类别的第一关联代价矩阵,使用匹配算法得到当前图像

基于多特征匹配的多目标跟踪方法.pdf
一种基于多特征匹配的多目标跟踪算法,其步骤是:首先,针对量测点与目标关联时,匹配特征数量过少的问题,建立了所有目标的特征矩阵,特征矩阵包含了所有目标的检验统计量特征和多普勒频率特征;其次,在寻找最佳关联点时,将所有关联点的特征与目标的特征矩阵进行比对,找出与目标匹配度最高的关联点;最后,确定目标在当前跟踪时刻的运动状态估计值、检验统计量和多普勒频率特征,用于对目标在当前跟踪时刻之后运动状态的估计。本发明通过建立特征矩阵,并寻找与目标特征矩阵最匹配的关联点,解决了当多目标轨迹交叉重叠时目标轨迹跟踪不准确的问
一种基于多目标条件的电网可用资源最优匹配方法.pdf
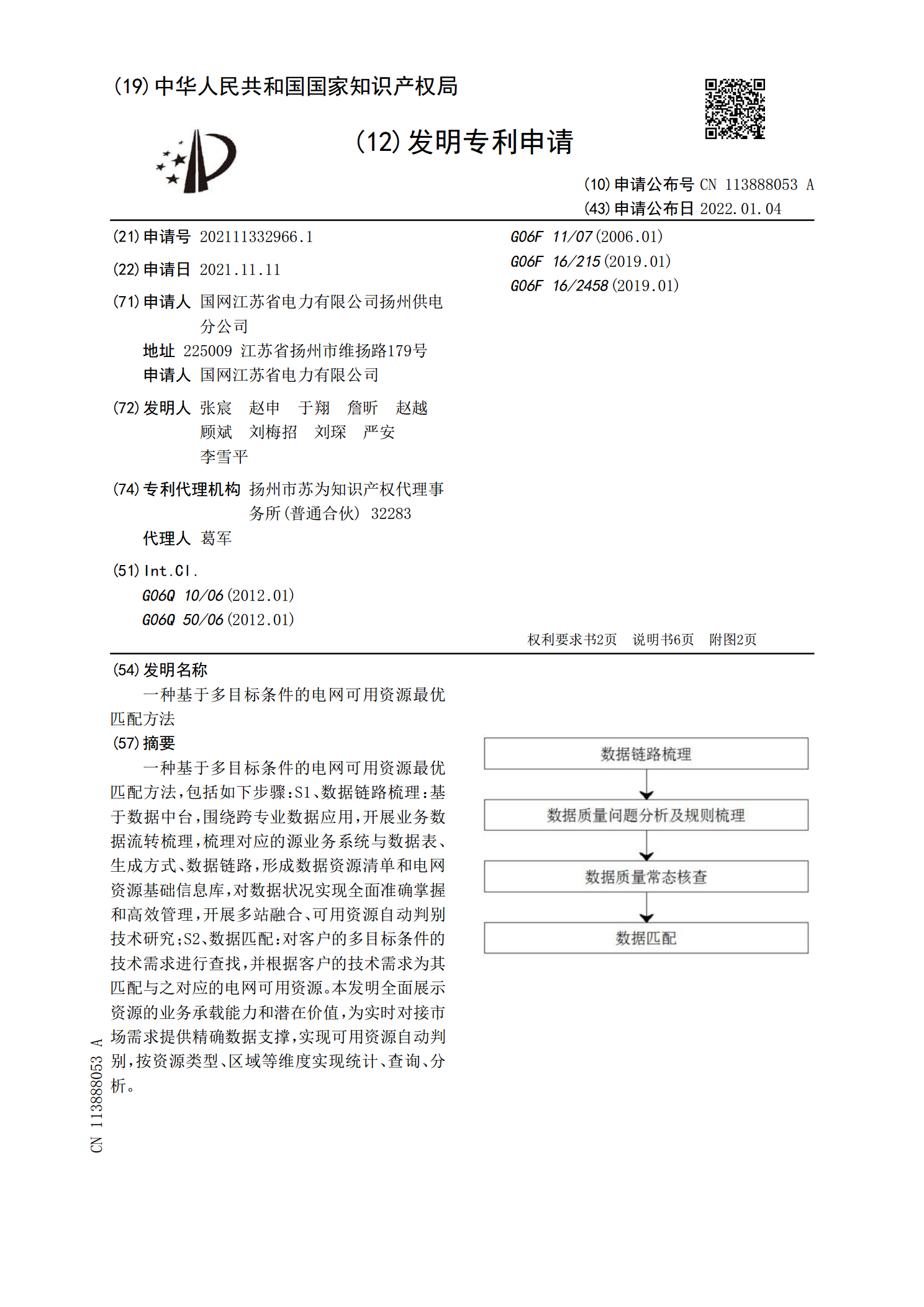
一种基于多目标条件的电网可用资源最优匹配方法,包括如下步骤:S1、数据链路梳理:基于数据中台,围绕跨专业数据应用,开展业务数据流转梳理,梳理对应的源业务系统与数据表、生成方式、数据链路,形成数据资源清单和电网资源基础信息库,对数据状况实现全面准确掌握和高效管理,开展多站融合、可用资源自动判别技术研究;S2、数据匹配:对客户的多目标条件的技术需求进行查找,并根据客户的技术需求为其匹配与之对应的电网可用资源。本发明全面展示资源的业务承载能力和潜在价值,为实时对接市场需求提供精确数据支撑,实现可用资源自动判别,
多目标跟踪匹配方法、装置、终端及存储介质.pdf
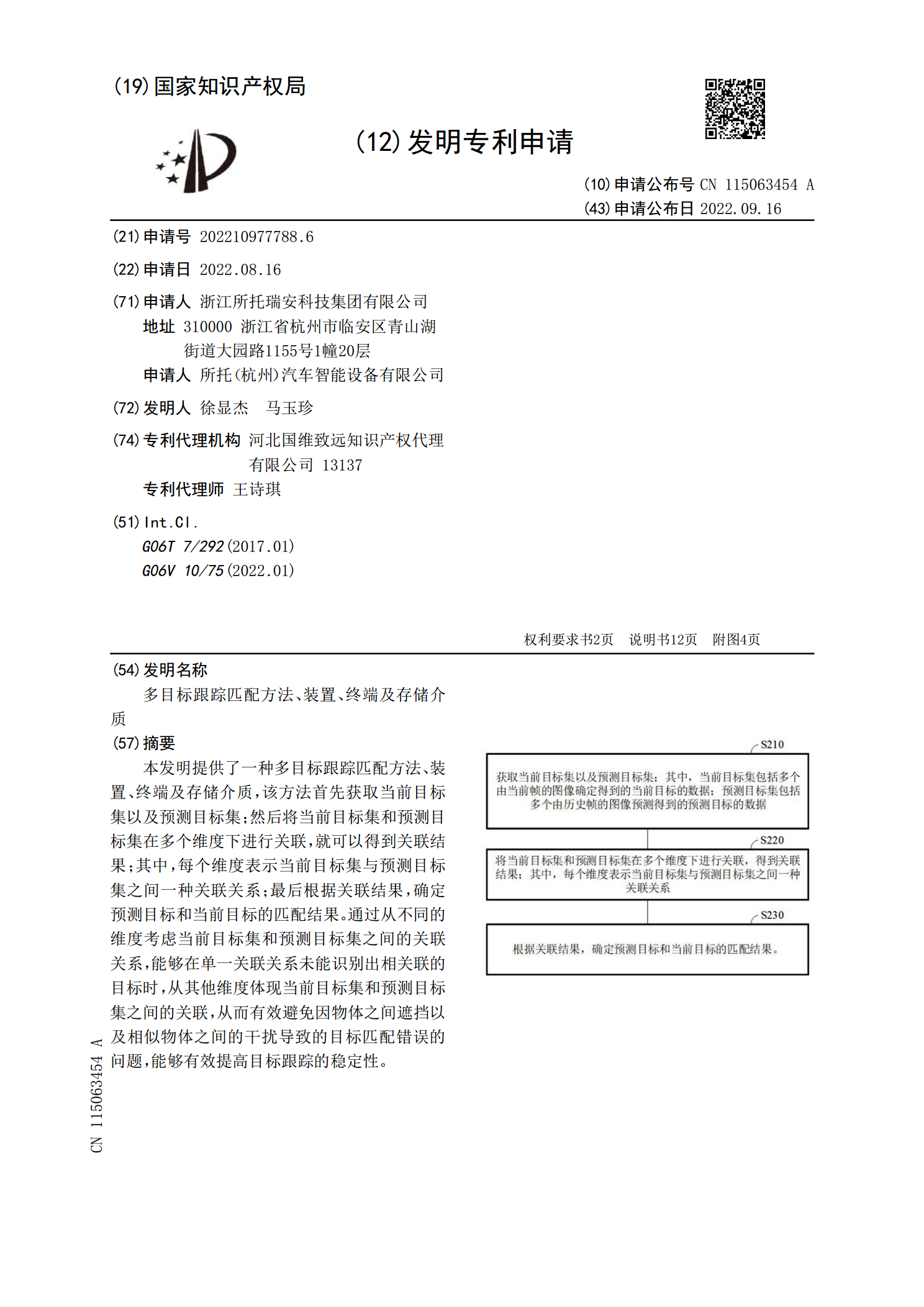
本发明提供了一种多目标跟踪匹配方法、装置、终端及存储介质,该方法首先获取当前目标集以及预测目标集;然后将当前目标集和预测目标集在多个维度下进行关联,就可以得到关联结果;其中,每个维度表示当前目标集与预测目标集之间一种关联关系;最后根据关联结果,确定预测目标和当前目标的匹配结果。通过从不同的维度考虑当前目标集和预测目标集之间的关联关系,能够在单一关联关系未能识别出相关联的目标时,从其他维度体现当前目标集和预测目标集之间的关联,从而有效避免因物体之间遮挡以及相似物体之间的干扰导致的目标匹配错误的问题,能够有效
一种隧道内实时多类别多目标跟踪方法.pdf
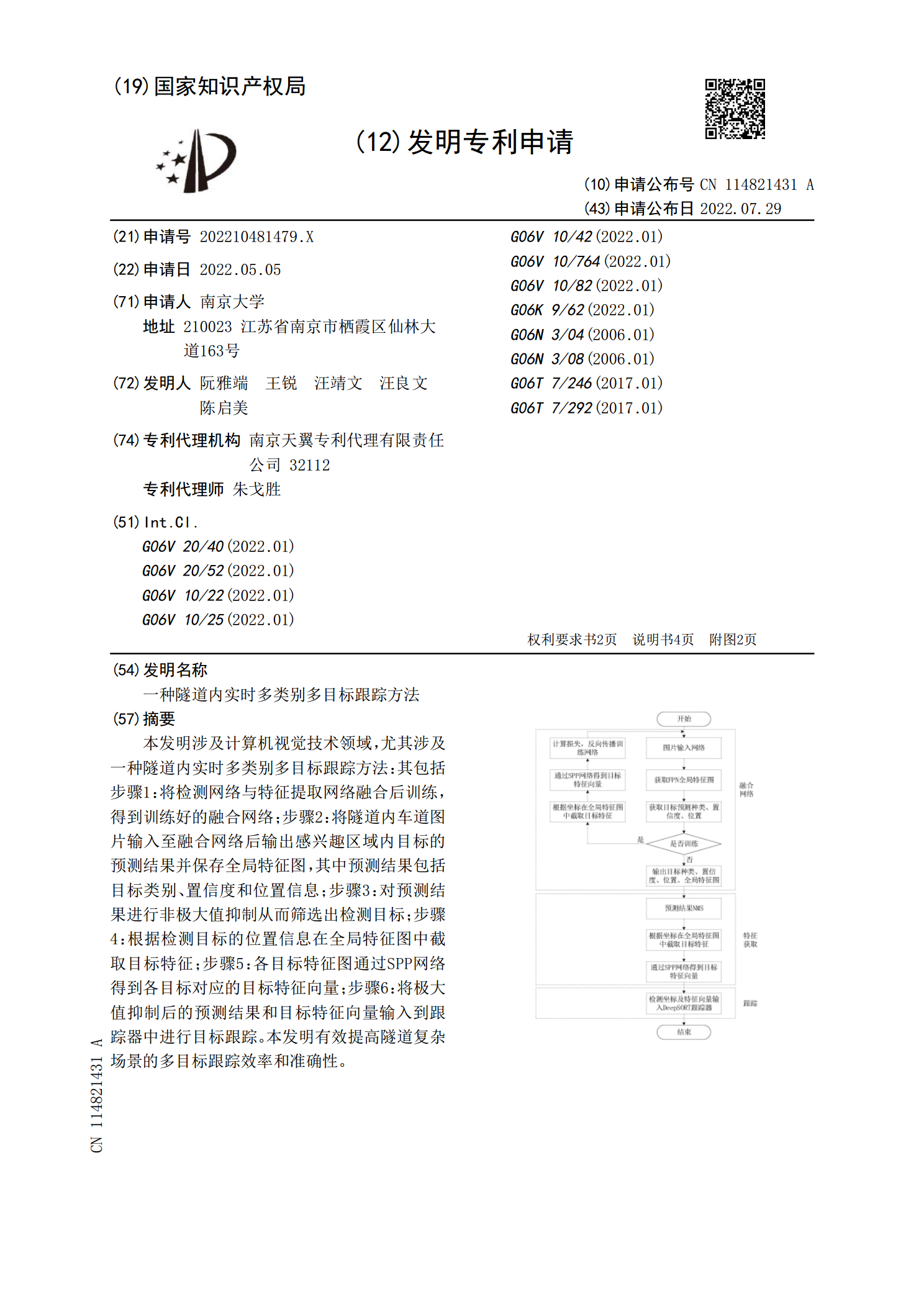
本发明涉及计算机视觉技术领域,尤其涉及一种隧道内实时多类别多目标跟踪方法:其包括步骤1:将检测网络与特征提取网络融合后训练,得到训练好的融合网络;步骤2:将隧道内车道图片输入至融合网络后输出感兴趣区域内目标的预测结果并保存全局特征图,其中预测结果包括目标类别、置信度和位置信息;步骤3:对预测结果进行非极大值抑制从而筛选出检测目标;步骤4:根据检测目标的位置信息在全局特征图中截取目标特征;步骤5:各目标特征图通过SPP网络得到各目标对应的目标特征向量;步骤6:将极大值抑制后的预测结果和目标特征向量输入到跟踪