
一种隧道内实时多类别多目标跟踪方法.pdf

努力****元恺

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种隧道内实时多类别多目标跟踪方法.pdf
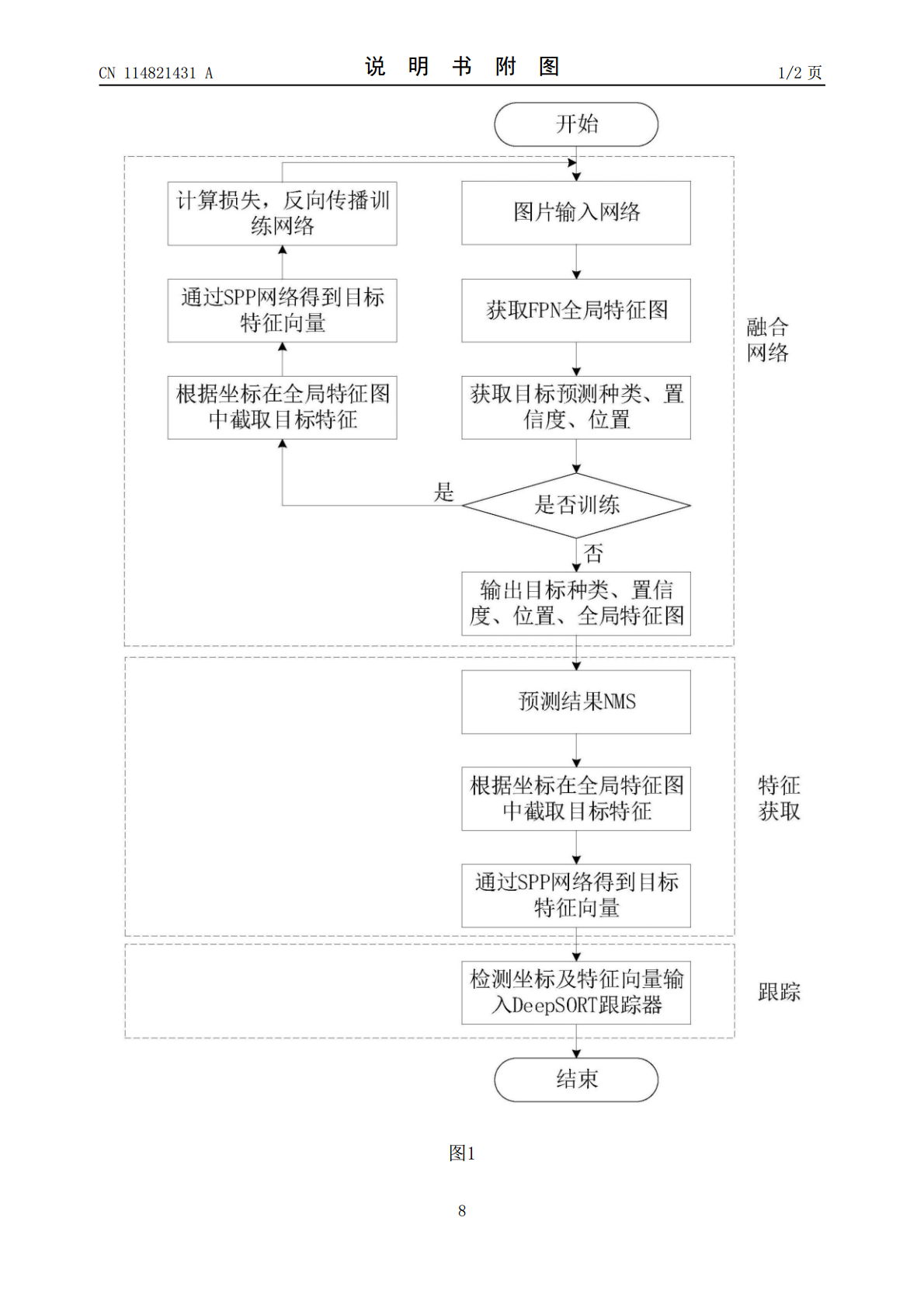
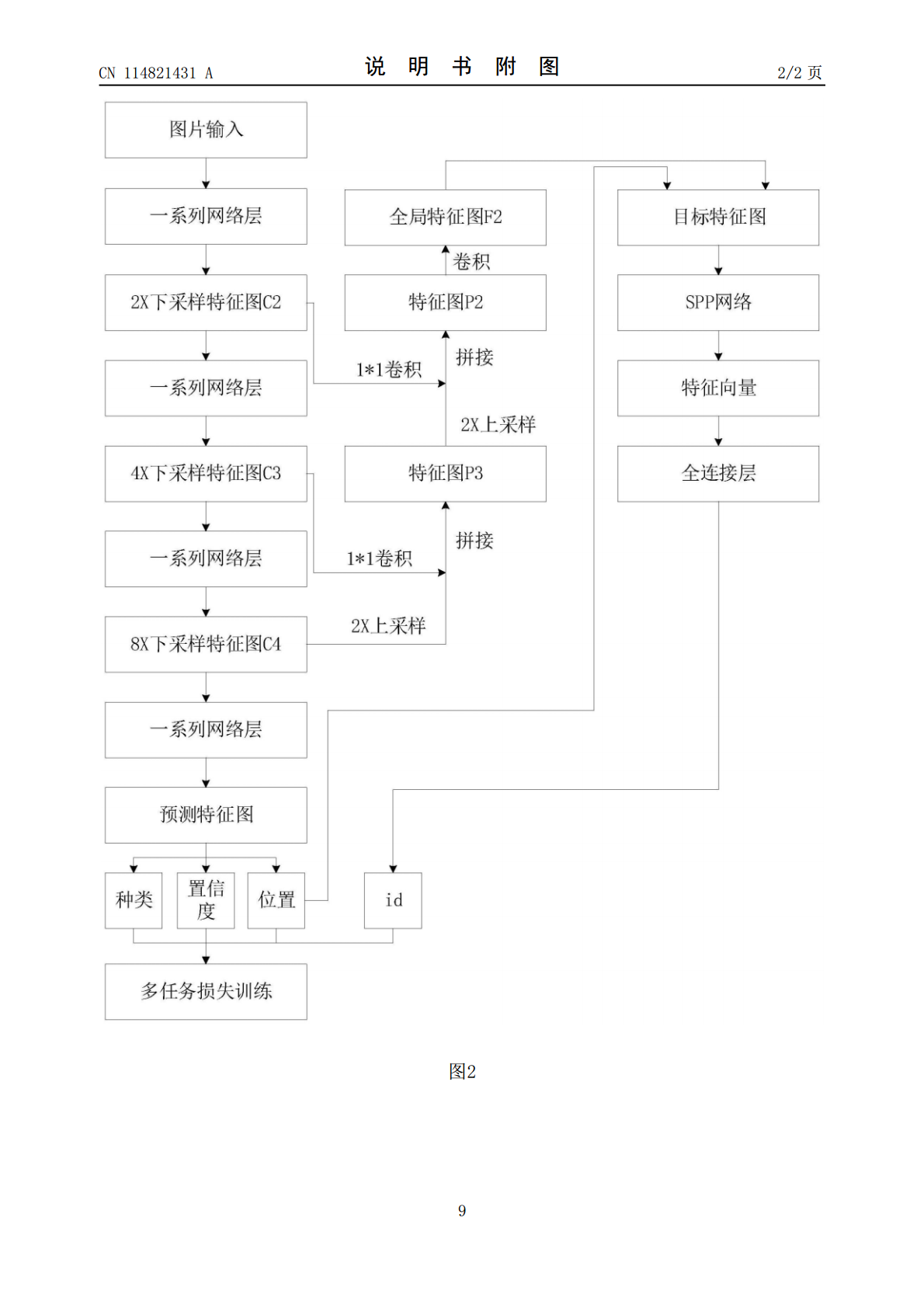
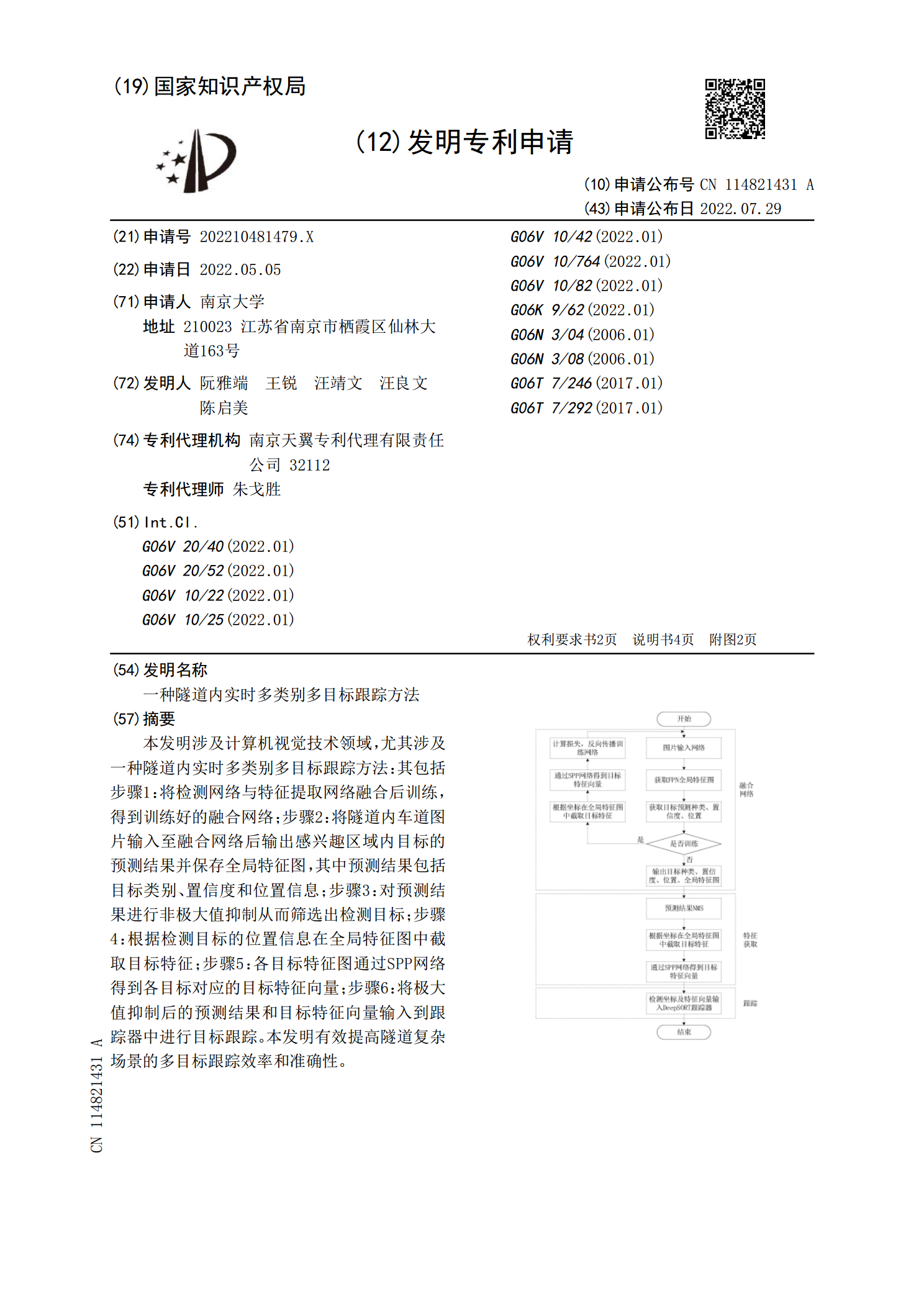
本发明涉及计算机视觉技术领域,尤其涉及一种隧道内实时多类别多目标跟踪方法:其包括步骤1:将检测网络与特征提取网络融合后训练,得到训练好的融合网络;步骤2:将隧道内车道图片输入至融合网络后输出感兴趣区域内目标的预测结果并保存全局特征图,其中预测结果包括目标类别、置信度和位置信息;步骤3:对预测结果进行非极大值抑制从而筛选出检测目标;步骤4:根据检测目标的位置信息在全局特征图中截取目标特征;步骤5:各目标特征图通过SPP网络得到各目标对应的目标特征向量;步骤6:将极大值抑制后的预测结果和目标特征向量输入到跟踪
一种隧道内实时多类别多目标跟踪方法.pdf
本发明涉及计算机视觉技术领域,尤其涉及一种隧道内实时多类别多目标跟踪方法:其包括步骤1:将检测网络与特征提取网络融合后训练,得到训练好的融合网络;步骤2:将隧道内车道图片输入至融合网络后输出感兴趣区域内目标的预测结果并保存全局特征图,其中预测结果包括目标类别、置信度和位置信息;步骤3:对预测结果进行非极大值抑制从而筛选出检测目标;步骤4:根据检测目标的位置信息在全局特征图中截取目标特征;步骤5:各目标特征图通过SPP网络得到各目标对应的目标特征向量;步骤6:将极大值抑制后的预测结果和目标特征向量输入到跟踪
一种实时多目标跟踪方法.pdf
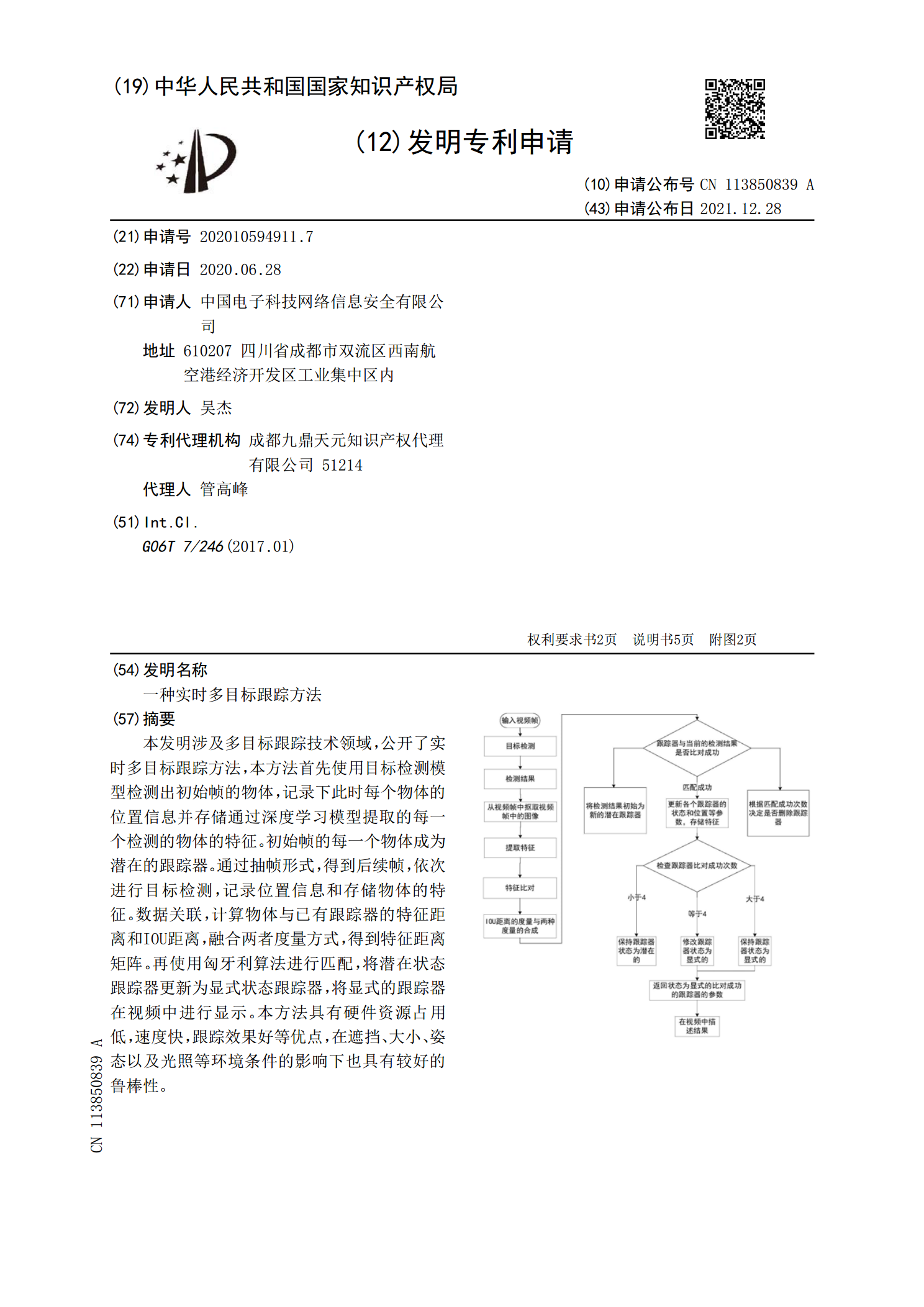
本发明涉及多目标跟踪技术领域,公开了实时多目标跟踪方法,本方法首先使用目标检测模型检测出初始帧的物体,记录下此时每个物体的位置信息并存储通过深度学习模型提取的每一个检测的物体的特征。初始帧的每一个物体成为潜在的跟踪器。通过抽帧形式,得到后续帧,依次进行目标检测,记录位置信息和存储物体的特征。数据关联,计算物体与已有跟踪器的特征距离和IOU距离,融合两者度量方式,得到特征距离矩阵。再使用匈牙利算法进行匹配,将潜在状态跟踪器更新为显式状态跟踪器,将显式的跟踪器在视频中进行显示。本方法具有硬件资源占用低,速度快
一种基于类别最优匹配的多目标跟踪方法及装置.pdf
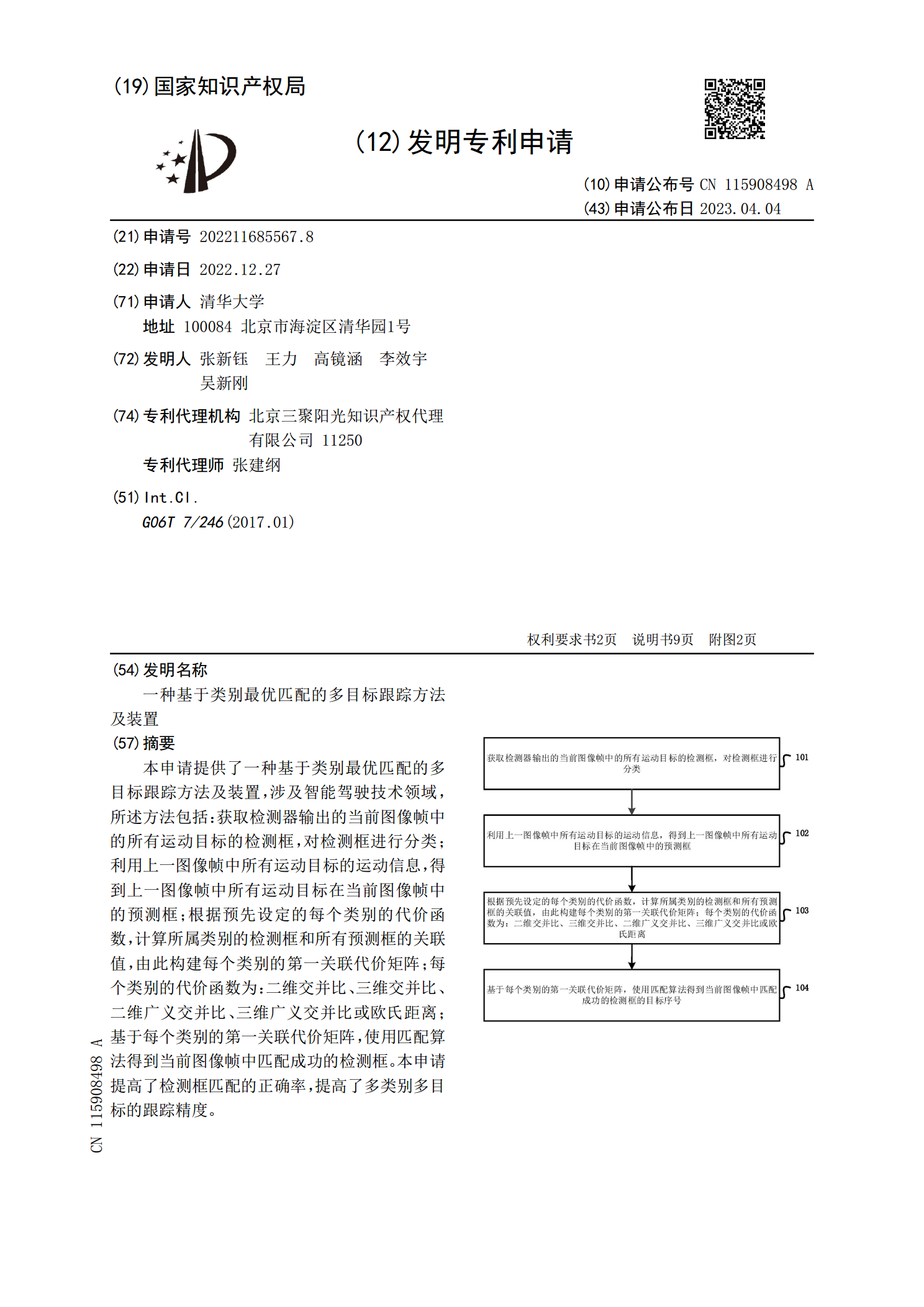
本申请提供了一种基于类别最优匹配的多目标跟踪方法及装置,涉及智能驾驶技术领域,所述方法包括:获取检测器输出的当前图像帧中的所有运动目标的检测框,对检测框进行分类;利用上一图像帧中所有运动目标的运动信息,得到上一图像帧中所有运动目标在当前图像帧中的预测框;根据预先设定的每个类别的代价函数,计算所属类别的检测框和所有预测框的关联值,由此构建每个类别的第一关联代价矩阵;每个类别的代价函数为:二维交并比、三维交并比、二维广义交并比、三维广义交并比或欧氏距离;基于每个类别的第一关联代价矩阵,使用匹配算法得到当前图像

实时视频中多目标遮挡跟踪方法研究.docx
实时视频中多目标遮挡跟踪方法研究实时视频中多目标遮挡跟踪方法研究摘要:随着计算机视觉技术的不断发展,多目标跟踪在许多应用中起着关键作用。然而,在实际应用中,目标可能会发生遮挡现象,如目标被其他目标、遮挡物或者场景中的其他元素遮挡。遮挡对于多目标跟踪带来了很大的挑战,因为它可能导致目标的丢失或者错误的跟踪。因此,本论文将研究实时视频中多目标遮挡跟踪的方法,以提高多目标跟踪的准确性和鲁棒性。一、引言近年来,多目标跟踪在许多应用领域中得到了广泛的关注和应用。例如,交通监控、视频监控和无人驾驶等领域都需要对多个目