
一种可调节式工业机械用机械手.pdf

霞英****娘子

1/8
2/8

3/8

4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可调节式工业机械用机械手.pdf
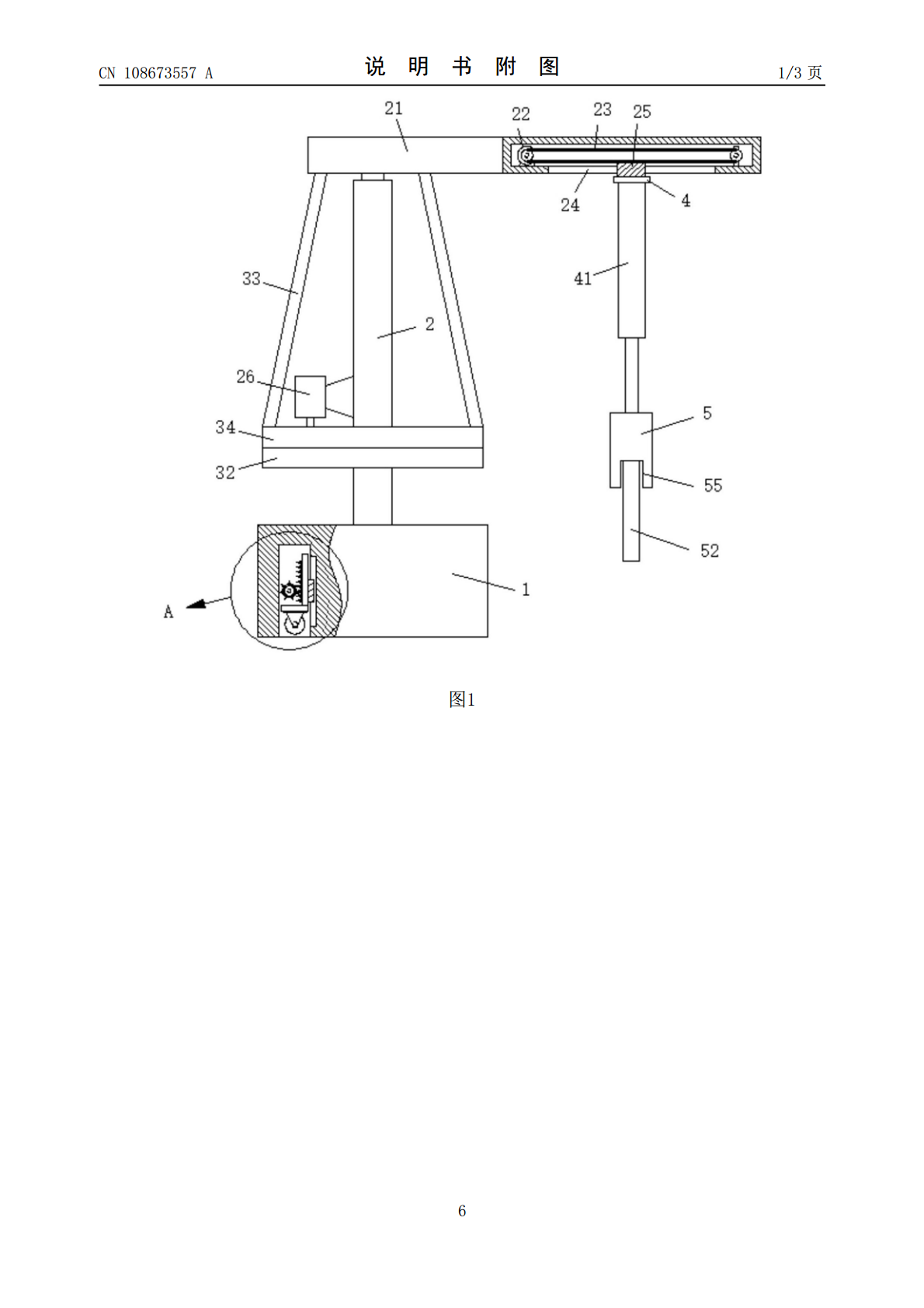
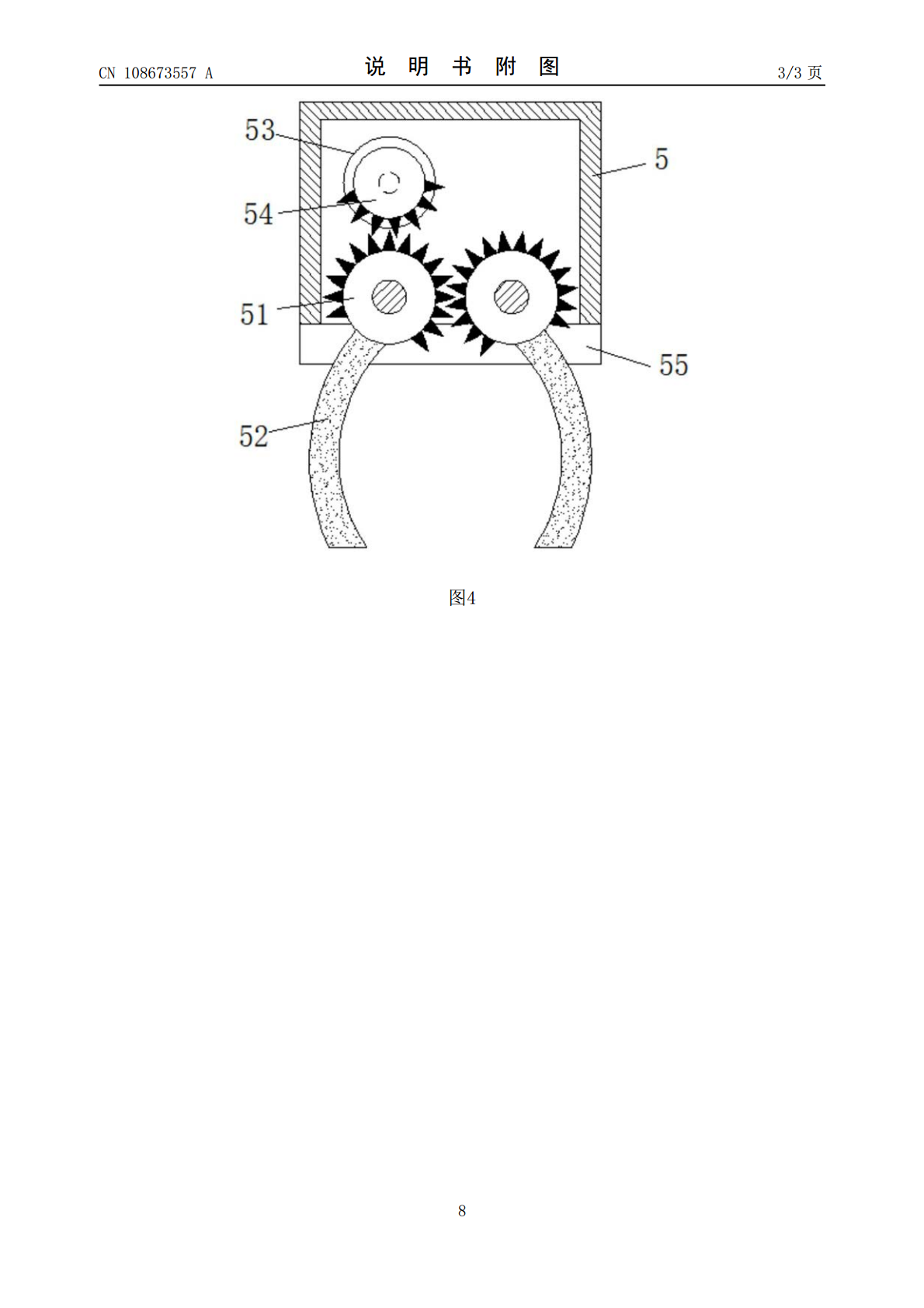
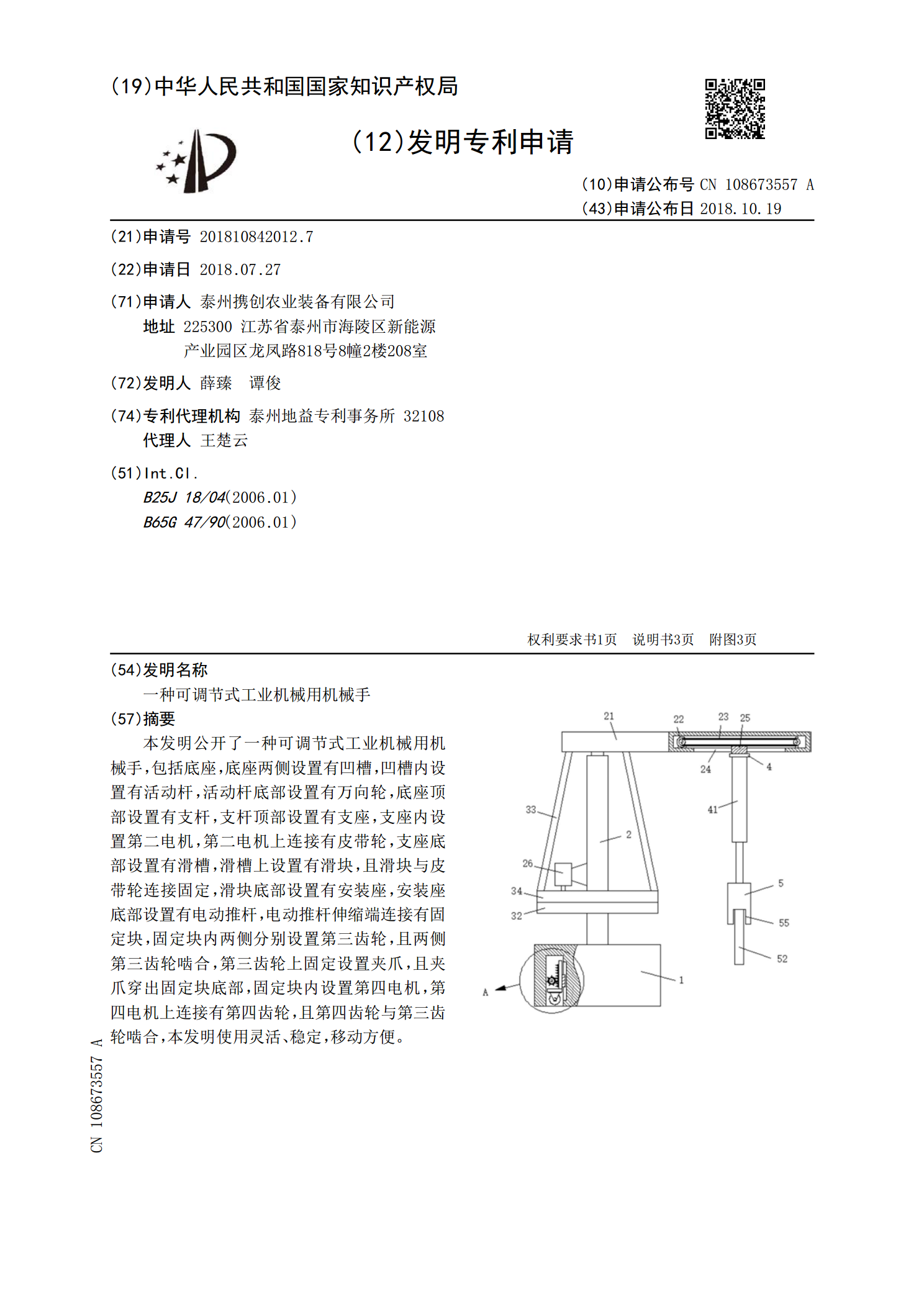
本发明公开了一种可调节式工业机械用机械手,包括底座,底座两侧设置有凹槽,凹槽内设置有活动杆,活动杆底部设置有万向轮,底座顶部设置有支杆,支杆顶部设置有支座,支座内设置第二电机,第二电机上连接有皮带轮,支座底部设置有滑槽,滑槽上设置有滑块,且滑块与皮带轮连接固定,滑块底部设置有安装座,安装座底部设置有电动推杆,电动推杆伸缩端连接有固定块,固定块内两侧分别设置第三齿轮,且两侧第三齿轮啮合,第三齿轮上固定设置夹爪,且夹爪穿出固定块底部,固定块内设置第四电机,第四电机上连接有第四齿轮,且第四齿轮与第三齿轮啮合,本
一种可灵活调节的机械手.pdf
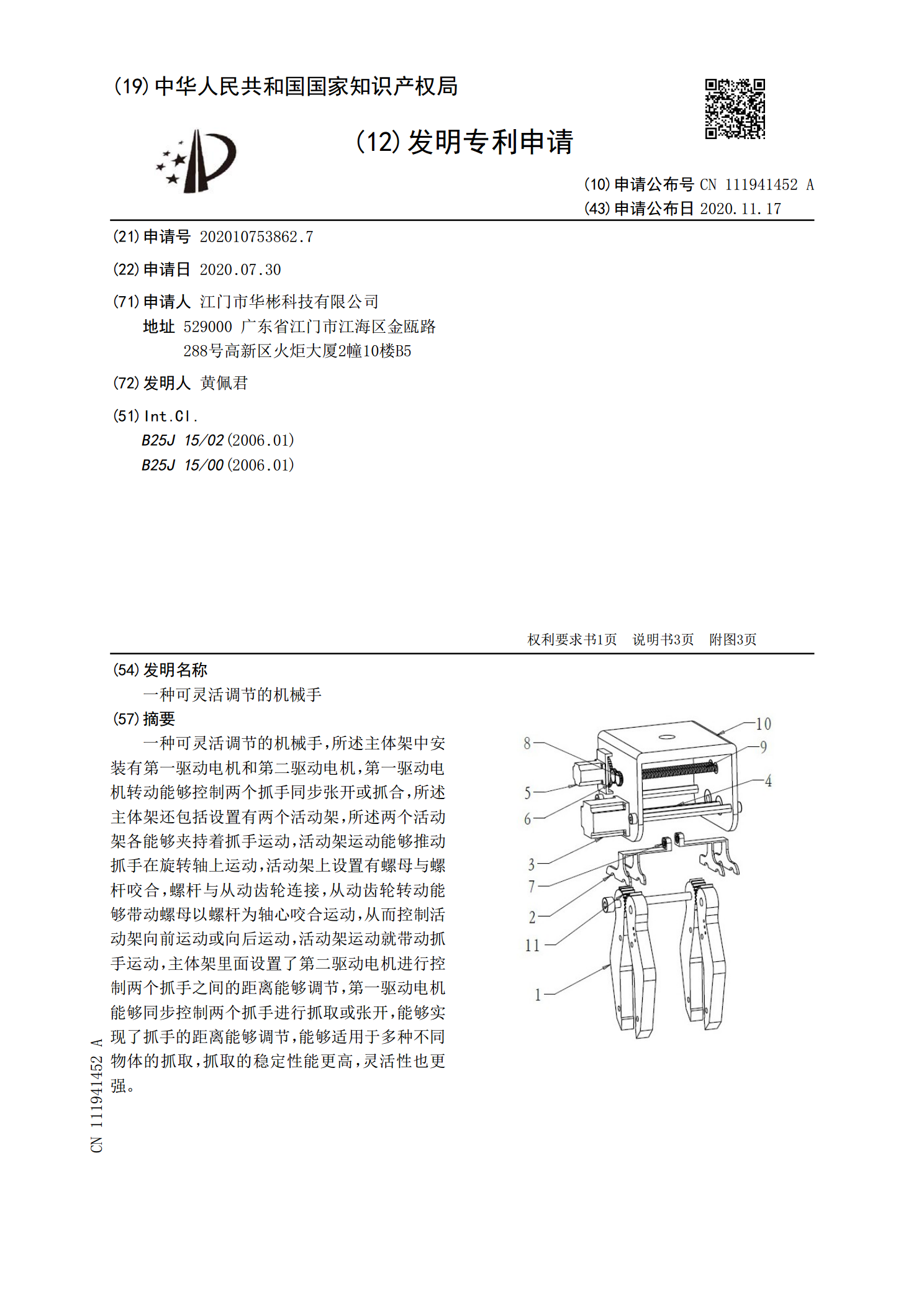
一种可灵活调节的机械手,所述主体架中安装有第一驱动电机和第二驱动电机,第一驱动电机转动能够控制两个抓手同步张开或抓合,所述主体架还包括设置有两个活动架,所述两个活动架各能够夹持着抓手运动,活动架运动能够推动抓手在旋转轴上运动,活动架上设置有螺母与螺杆咬合,螺杆与从动齿轮连接,从动齿轮转动能够带动螺母以螺杆为轴心咬合运动,从而控制活动架向前运动或向后运动,活动架运动就带动抓手运动,主体架里面设置了第二驱动电机进行控制两个抓手之间的距离能够调节,第一驱动电机能够同步控制两个抓手进行抓取或张开,能够实现了抓手的
一种工业用机械手.pdf
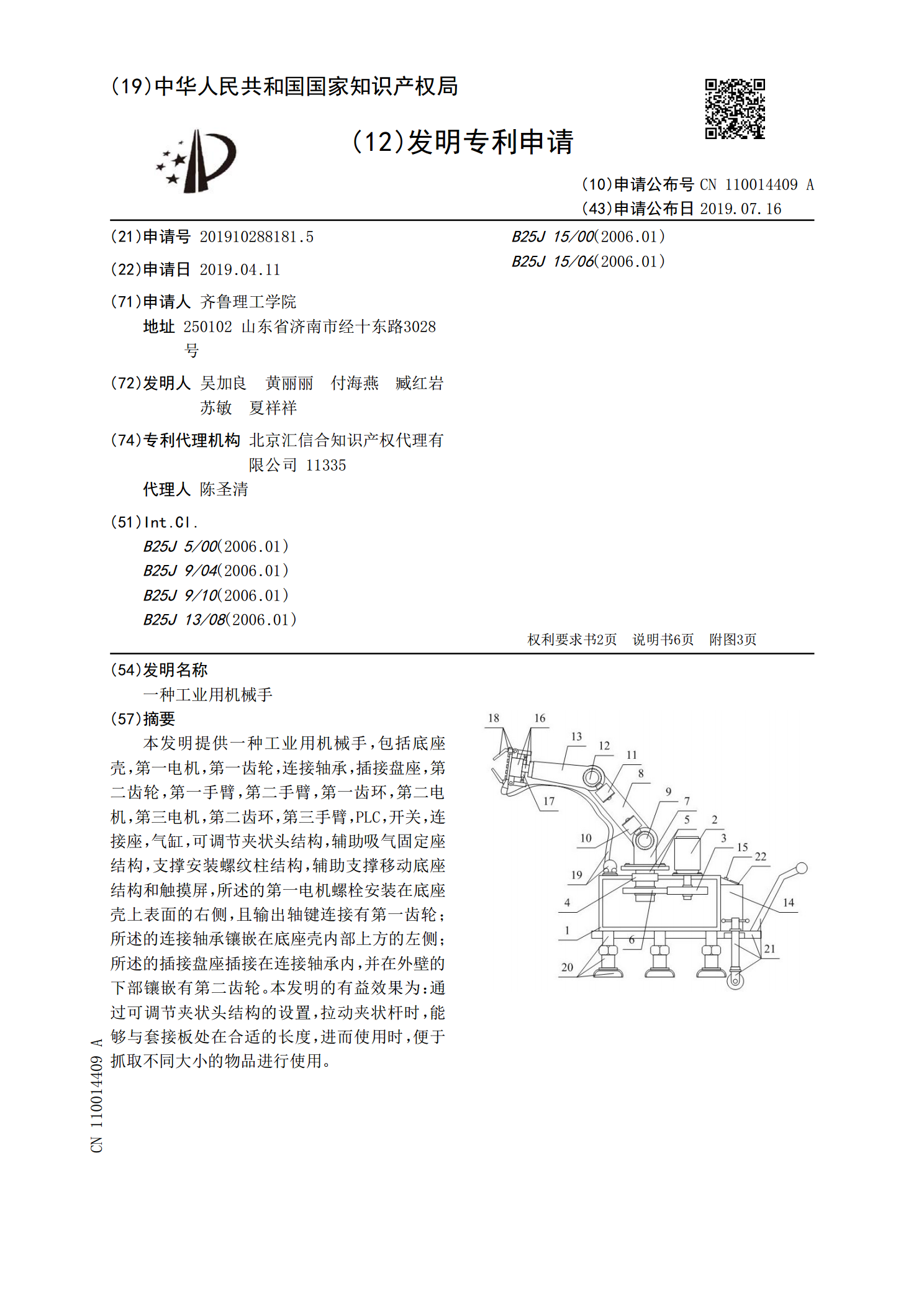
本发明提供一种工业用机械手,包括底座壳,第一电机,第一齿轮,连接轴承,插接盘座,第二齿轮,第一手臂,第二手臂,第一齿环,第二电机,第三电机,第二齿环,第三手臂,PLC,开关,连接座,气缸,可调节夹状头结构,辅助吸气固定座结构,支撑安装螺纹柱结构,辅助支撑移动底座结构和触摸屏,所述的第一电机螺栓安装在底座壳上表面的右侧,且输出轴键连接有第一齿轮;所述的连接轴承镶嵌在底座壳内部上方的左侧;所述的插接盘座插接在连接轴承内,并在外壁的下部镶嵌有第二齿轮。本发明的有益效果为:通过可调节夹状头结构的设置,拉动夹状杆时
一种可旋转工业机械手.pdf
本发明提供一种可旋转工业机械手,包括旋转机构以及夹持机构,所述旋转机构上装配有夹持机构,所述旋转机构包括转动杆、电动缸、支撑柱、支撑箱体、移动板、滚轮、电机一、单向丝杆以及电机二,所述夹持机构包括移动块、双向丝杆、夹持块、万向轮、弹簧、电机三以及凸轮,与现有技术相比,本发明具有如下的有益效果:实现了旋转的目的,同时也便于移动,而且也可对转动杆进行转动,提高空间利用率,使用效果好,实现了减震的功能,防止夹持块碰撞损坏,同时也扩大了夹持范围,而且在夹持过程中,夹持稳定性好,可防止掉落。

一种可旋转简易工业机械手.pdf
本发明提供一种可旋转简易工业机械手,包括滚珠丝杆、移动夹板、支撑块、辅助承载台、导向槽、导入腔、透明防护套筒、导向轮以及环形滑槽,滚珠丝杆装配在凹槽内中部位置,移动夹板安装在螺母座下端面上,支撑块固定在移动夹板下端面上,辅助承载台安装在固定夹板下端面上,导向槽开设在导入腔内下端面上,导入腔开设在辅助承载台中部位置,该设计实现了夹取物品的防坠落功能,透明防护套筒套装在转轴环形侧面上,导向轮安装在透明防护套筒上端面上,环形滑槽开设在机械臂下端上,该设计实现了转轴的防护功能,延长了转轴的使用寿命,本发明结构合理