
一种节能高效具有高续航能力的四轴飞行器.pdf

是浩****32

1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种节能高效具有高续航能力的四轴飞行器.pdf
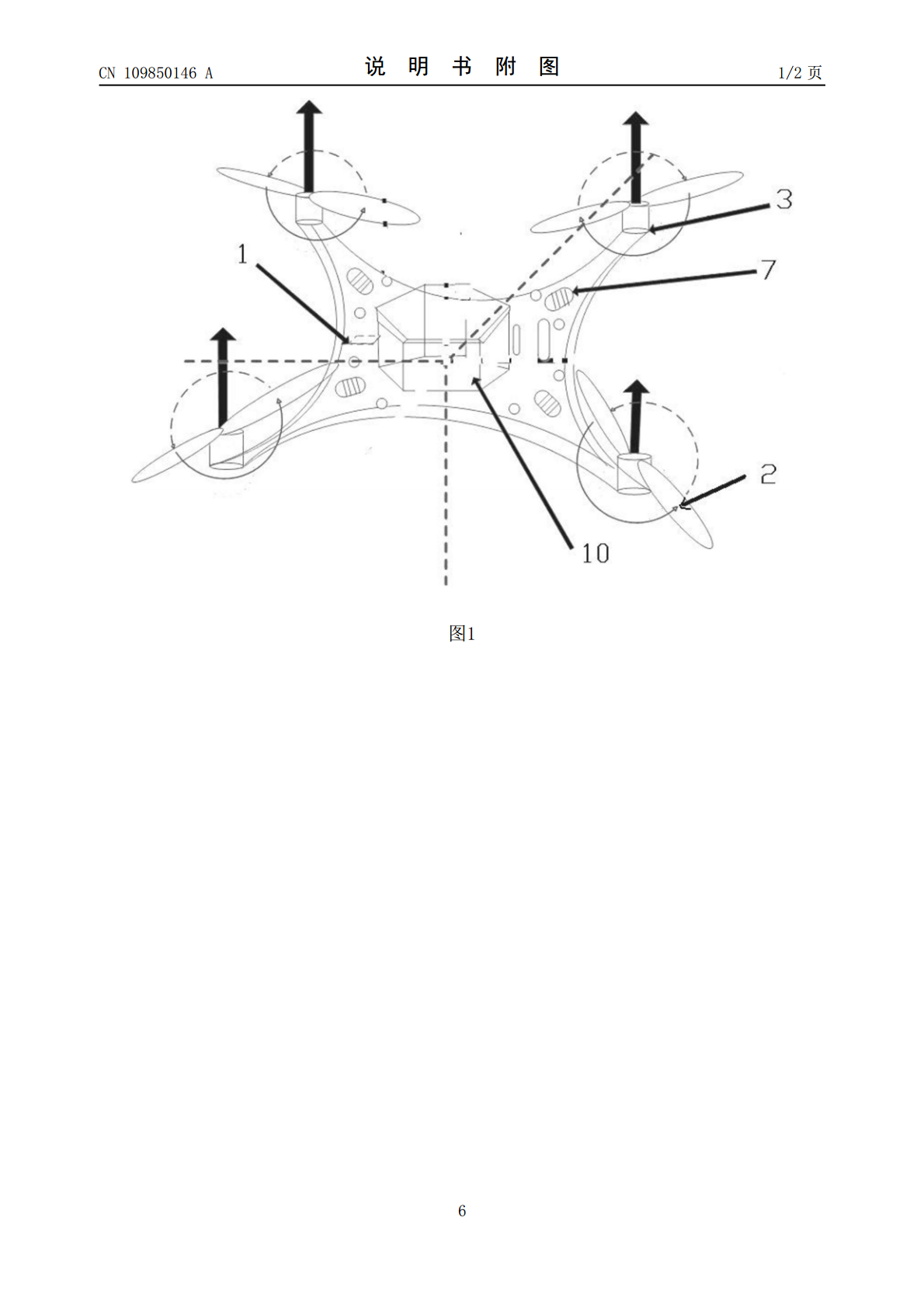
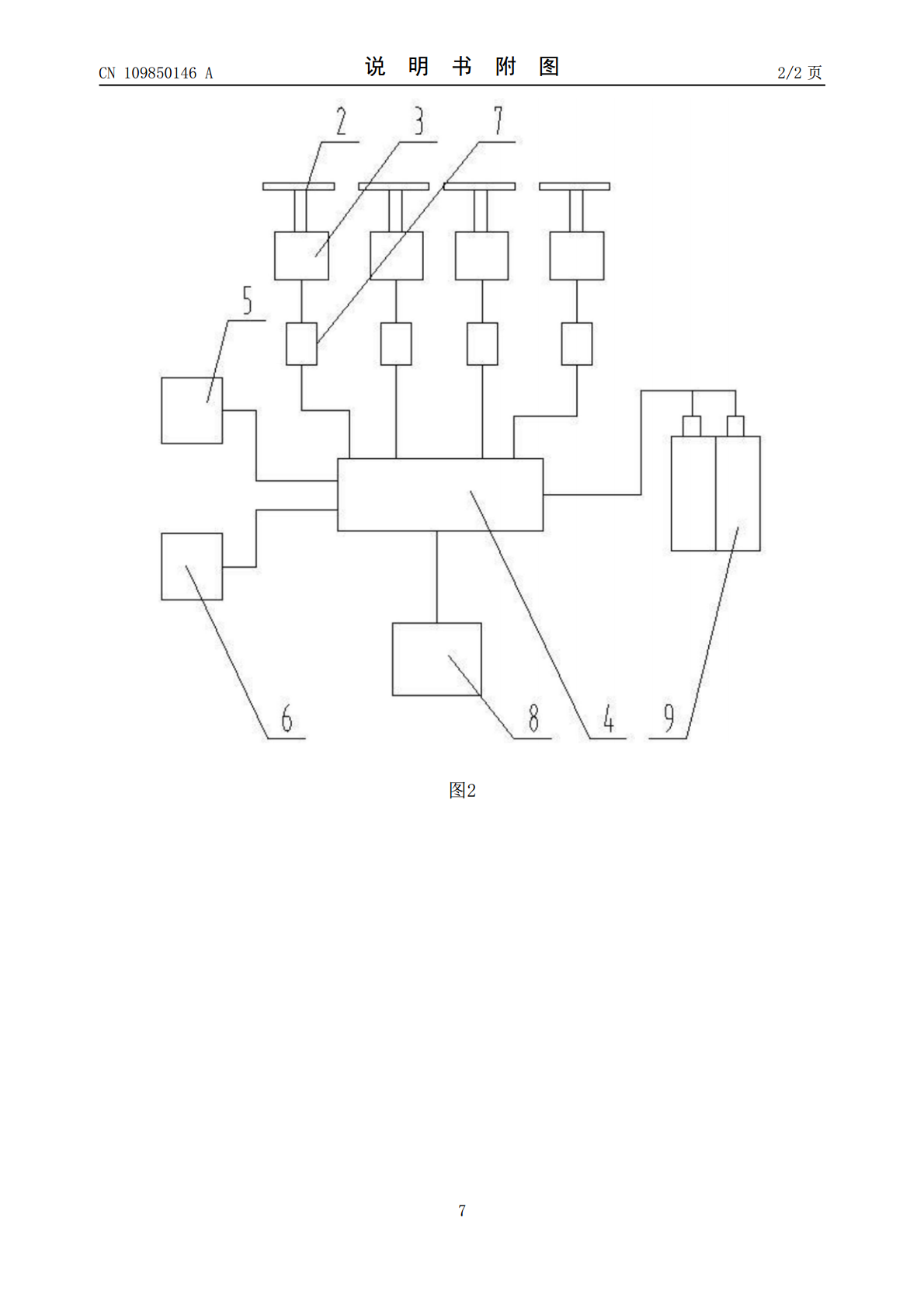
一种节能高效具有高续航能力的四轴飞行器,涉及无人机技术领域,它包括无人机机架(1)、四旋翼组件、主控制系统和姿态测量模块,无人机机架(1)上设有用于安装旋翼的四个支杆,所述四旋翼组件包括四个旋翼(2)和用于驱动旋翼转动的四个无刷电机(3),所述四个旋翼(2)分别通过转轴和轴承活动安装在无人机机架(1)的四个支杆端部,所述四个无刷电机(3)分别安装在无人机机架(1)上;本发明对四旋翼无人机基于高频振动传统自稳系统模式下出现的问题进行实质性的改善,使得数据的采集更加真实可靠,从而保障了四旋翼无人机的高稳定性控
具有高续航能力的电动汽车.pdf
本发明涉及一种具有高续航能力的电动汽车,包括车体;车体上设有增程器;增程器包括风力发电机或动力发电机;风力发电机或动力发电机与驱动电机电连接;车体的一侧的底部设有变速驱动桥,另一侧的底部设有变速从动桥;变速驱动桥与驱动电机连接;变速驱动桥的两端分别固定有一个后车轮;变速从动桥的两端分别固定有一个前车轮。增程器使得电动汽车的续航能力大大提高。其中,当发电机为风力发电机时,风力发电机在电动汽车行驶过程中,能够利用电动汽车前进产生的风力进行持续性发电;当发电机为动力发电机时,动力发电机能够利用前车轮或/和后车轮
具有高续航能力的新能源汽车.pdf
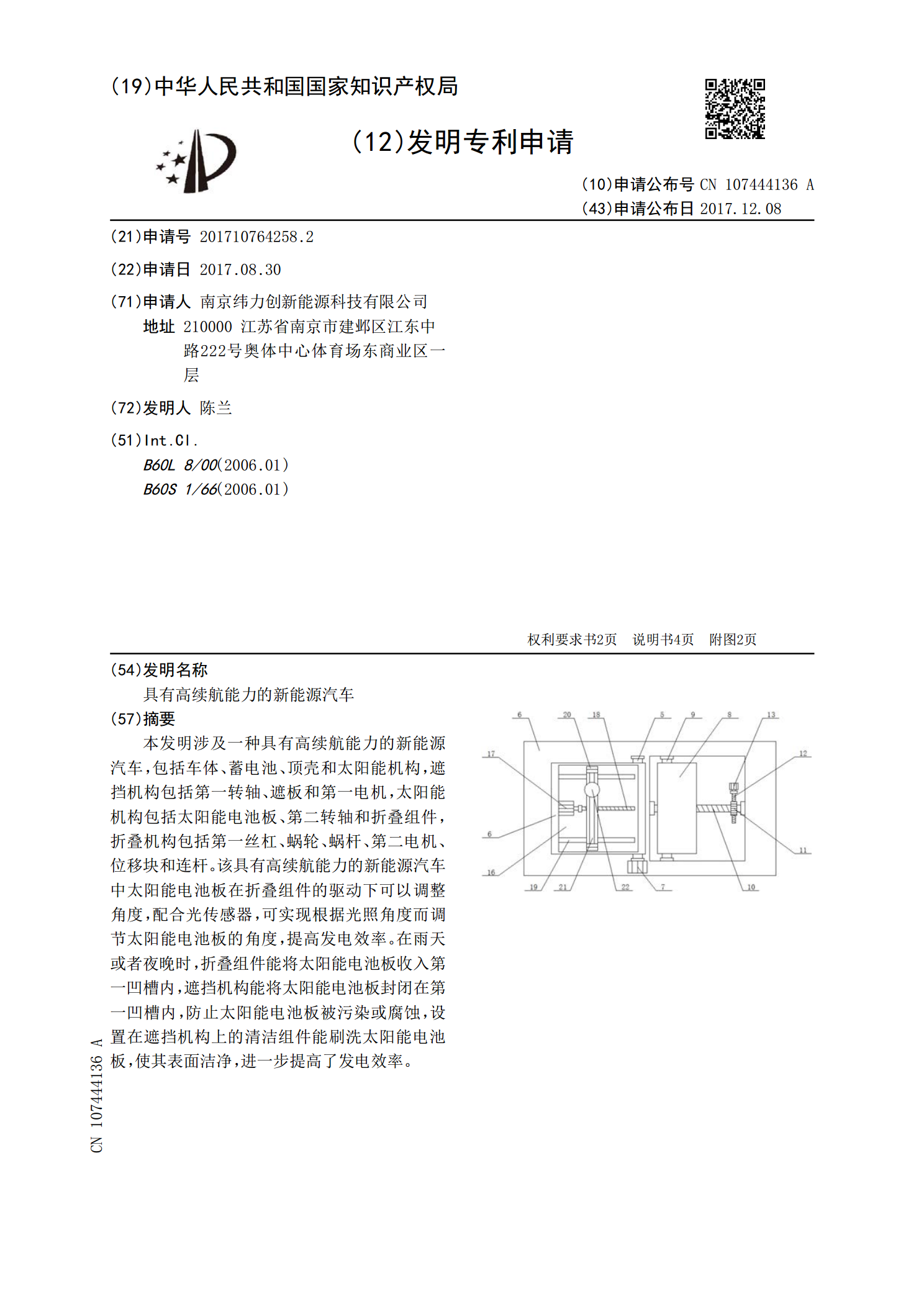
本发明涉及一种具有高续航能力的新能源汽车,包括车体、蓄电池、顶壳和太阳能机构,遮挡机构包括第一转轴、遮板和第一电机,太阳能机构包括太阳能电池板、第二转轴和折叠组件,折叠机构包括第一丝杠、蜗轮、蜗杆、第二电机、位移块和连杆。该具有高续航能力的新能源汽车中太阳能电池板在折叠组件的驱动下可以调整角度,配合光传感器,可实现根据光照角度而调节太阳能电池板的角度,提高发电效率。在雨天或者夜晚时,折叠组件能将太阳能电池板收入第一凹槽内,遮挡机构能将太阳能电池板封闭在第一凹槽内,防止太阳能电池板被污染或腐蚀,设置在遮挡机

一种具有高续航能力的智能化无人机.pdf
本发明涉及一种具有高续航能力的智能化无人机,包括机身、控制电路、飞行机构和风力发电机构,飞行机构包括若干个飞行组件,风力发电机构包括驱动组件、发电组件和升降组件,驱动组件包括转轴、轴套、连接盘、支撑架和叶片,发电组件包括第一齿轮、第二齿轮、齿轮箱和发电机,升降组件包括套杆、丝杠和升降电机。该具有高续航能力的智能化无人机结构精巧,特有的风力发电机构在其飞行时能够利用高空的风能进行发电,极大地提高了续航能力。风力发电机构中特有的升降组件能调节风力发电机构的整体高度,使该风力发电机构不会影响无人机的飞行。另外,

一种高续航能力的VR相机.pdf
本发明公开了一种高续航能力的VR相机,包括壳体,所述壳体的内部设有电路板,所述电路板上设有整流元件QZ,所述整流元件QZ的引脚1连接有光伏板U1的正极输出端,且光伏板U1的负极输出端和整流元件QZ的引脚3相连接,所述整流元件QZ的引脚4连接有电容C1、电阻R1、电容C2、电阻R2和NPN型三极管Q1的集电极,所述电阻R2的另一端连接有NPN型三极管Q1的基极和二极管D1的负极。本发明在户外采用光伏板U1分别对第一电池U2和第二电池U3进行充电,VR相机可以对太阳光进行利用,使得VR相机在户外可以进行长时间