
一种用于绳驱机械臂的三自由度腕关节结构.pdf

新月****姐a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于绳驱机械臂的三自由度腕关节结构.pdf
本发明涉及绳驱动机械臂领域。技术方案是:一种用于绳驱机械臂的三自由度腕关节结构,其特征在于:该结构包括布置在基座上的三个电机轮、可转动地定位在基座上的回转基座、固定在基座内的若干滑轮、可绕水平轴线转动地定位在回转基座上的传动轴、穿套固定在回转轴上的第一绕线轮、可转动地套设在回转轴上的第二绕线轮与第三绕线轮、穿套固定在传动轴上第一输出轮和两个绕线轮、可转动地套设在传动轴上的第二输出轮、与摇杆连接的末端平台、可转动地穿套在万向节第一转轴上的两个绕线环、穿套在万向节第二转轴上的两个支杆、驱动回转基座的两根传动绳
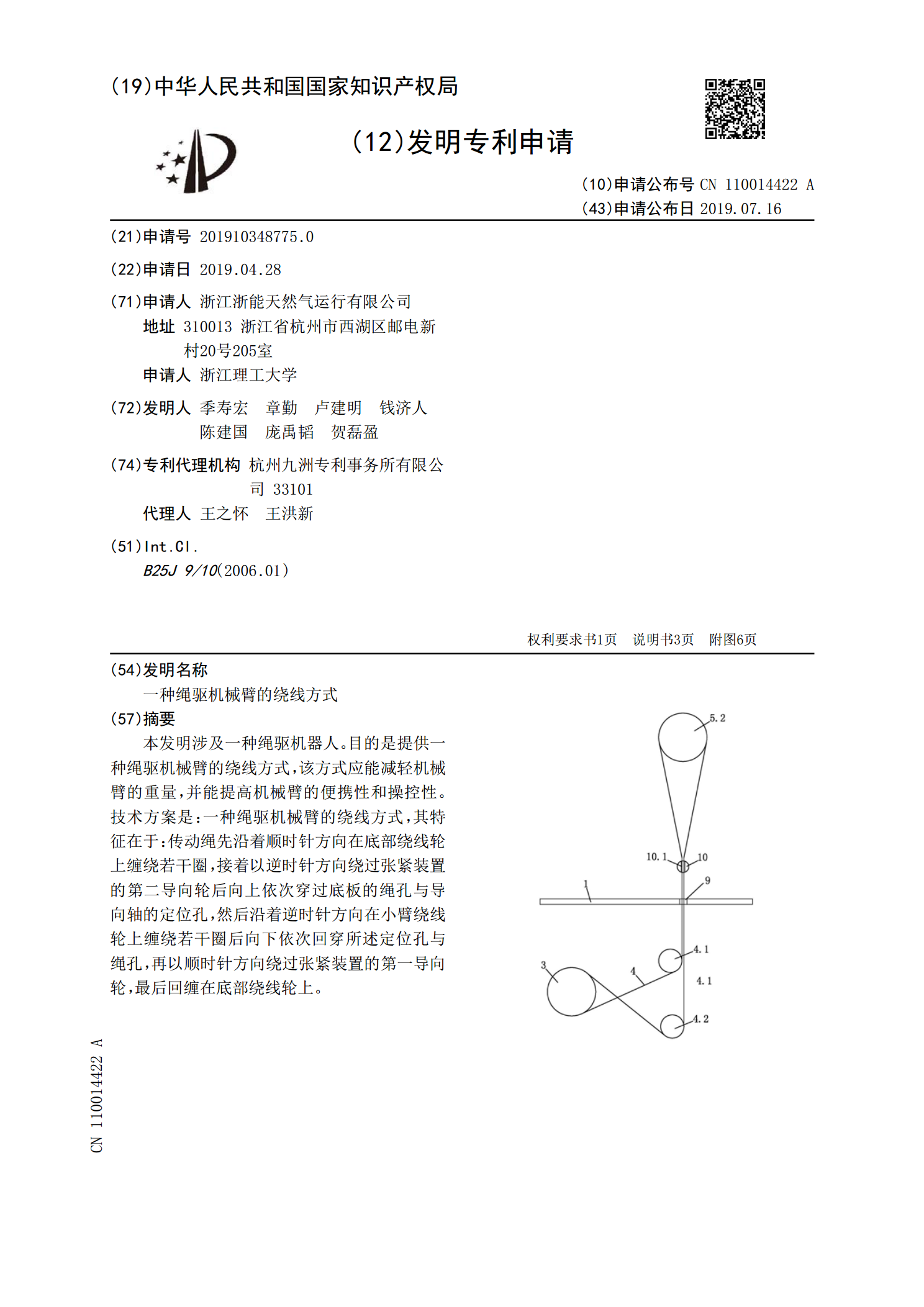
一种绳驱机械臂的绕线方式.pdf
本发明涉及一种绳驱机器人。目的是提供一种绳驱机械臂的绕线方式,该方式应能减轻机械臂的重量,并能提高机械臂的便携性和操控性。技术方案是:一种绳驱机械臂的绕线方式,其特征在于:传动绳先沿着顺时针方向在底部绕线轮上缠绕若干圈,接着以逆时针方向绕过张紧装置的第二导向轮后向上依次穿过底板的绳孔与导向轴的定位孔,然后沿着逆时针方向在小臂绕线轮上缠绕若干圈后向下依次回穿所述定位孔与绳孔,再以顺时针方向绕过张紧装置的第一导向轮,最后回缠在底部绕线轮上。

水下绳驱高冗余自由度机械臂运动学控制研究.docx
水下绳驱高冗余自由度机械臂运动学控制研究水下绳驱高冗余自由度机械臂运动学控制研究摘要水下机器人在海洋探测和海底作业等领域具有广泛应用前景。高冗余自由度机械臂是水下机器人的核心组成部分,控制其运动学十分重要。本研究以水下机器人的高冗余自由度机械臂为研究对象,研究其运动学控制方法,提出一种适用于水下环境的控制算法,并通过仿真实验验证了算法的有效性。关键词:水下机器人,高冗余自由度机械臂,运动学控制,控制算法1.引言水下机器人具有在海洋中执行任务的能力,广泛应用于海洋勘测、水下结构检查、深海探测等领域。机械臂作

一种模块化关节以及七自由度模块化绳驱机械臂.pdf
本发明涉及一种模块化关节以及七自由度模块化绳驱机械臂,其模块化关节包括驱动电机,驱动电机带动减速机构,所述减速机构的输出轴穿过绳轮的中间孔带动所述绳轮转动,还带动所述绳轮上方设置的第一轴承的轴承内圈;设置第二轴承与所述第一轴承的轴线平行,第一、第二轴承的轴承外圈固定法兰之间固定连接、外圈轴承座固定连接;所述绳轮与所述第二轴承的内圈轴承座之间缠绕有驱动绳索。本发明的模块化关节中,驱动电机带动绳轮以及第一轴承运动,绳轮上的驱动绳索带动第二轴承转动,结构简单合理,并且具有一定在载荷能力;将模块化关节按一定方式布
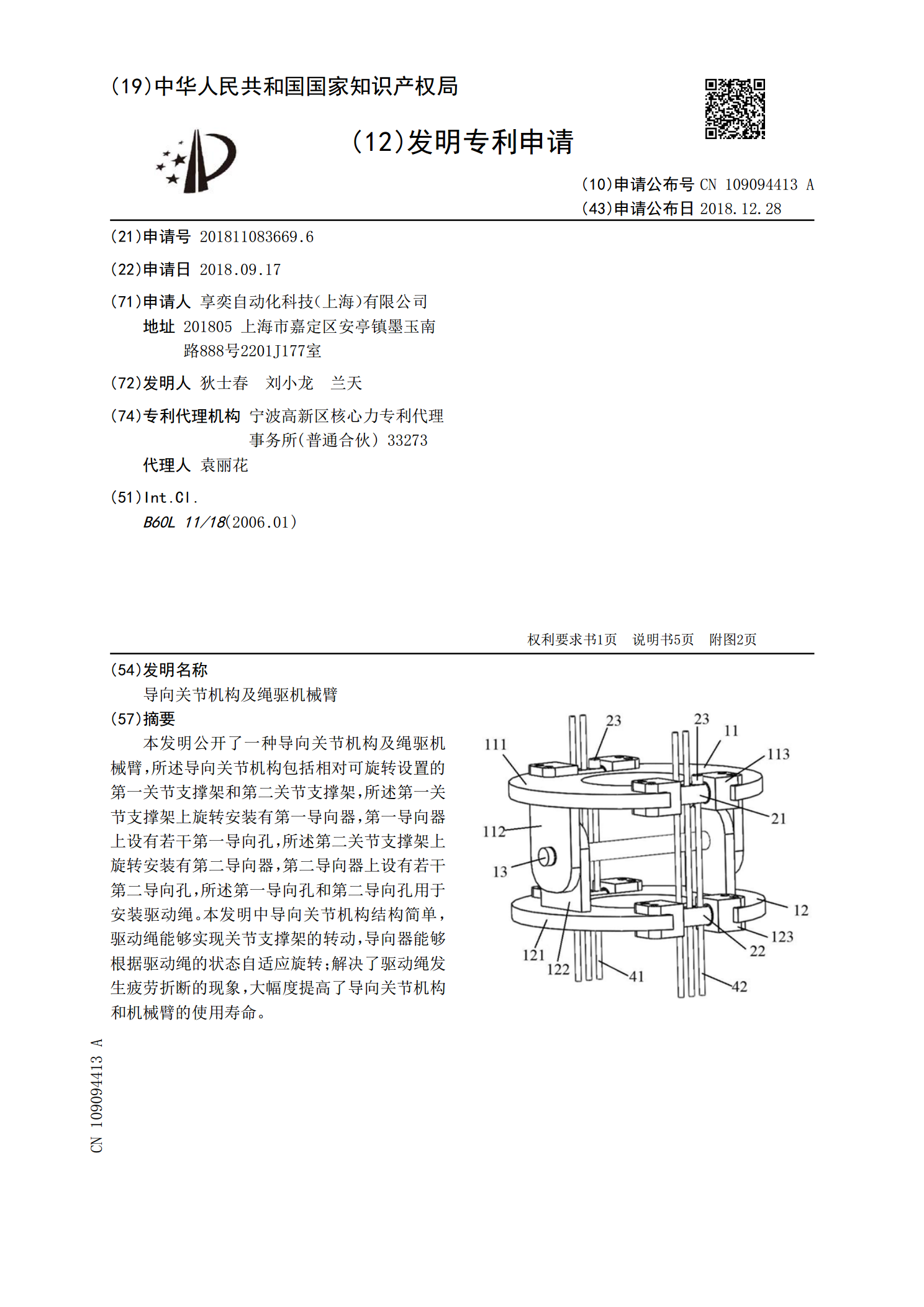
导向关节机构及绳驱机械臂.pdf
本发明公开了一种导向关节机构及绳驱机械臂,所述导向关节机构包括相对可旋转设置的第一关节支撑架和第二关节支撑架,所述第一关节支撑架上旋转安装有第一导向器,第一导向器上设有若干第一导向孔,所述第二关节支撑架上旋转安装有第二导向器,第二导向器上设有若干第二导向孔,所述第一导向孔和第二导向孔用于安装驱动绳。本发明中导向关节机构结构简单,驱动绳能够实现关节支撑架的转动,导向器能够根据驱动绳的状态自适应旋转;解决了驱动绳发生疲劳折断的现象,大幅度提高了导向关节机构和机械臂的使用寿命。