
一种变螺距多级罗茨真空泵及其转子设计方法.pdf

一条****彩妍

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种变螺距多级罗茨真空泵及其转子设计方法.pdf
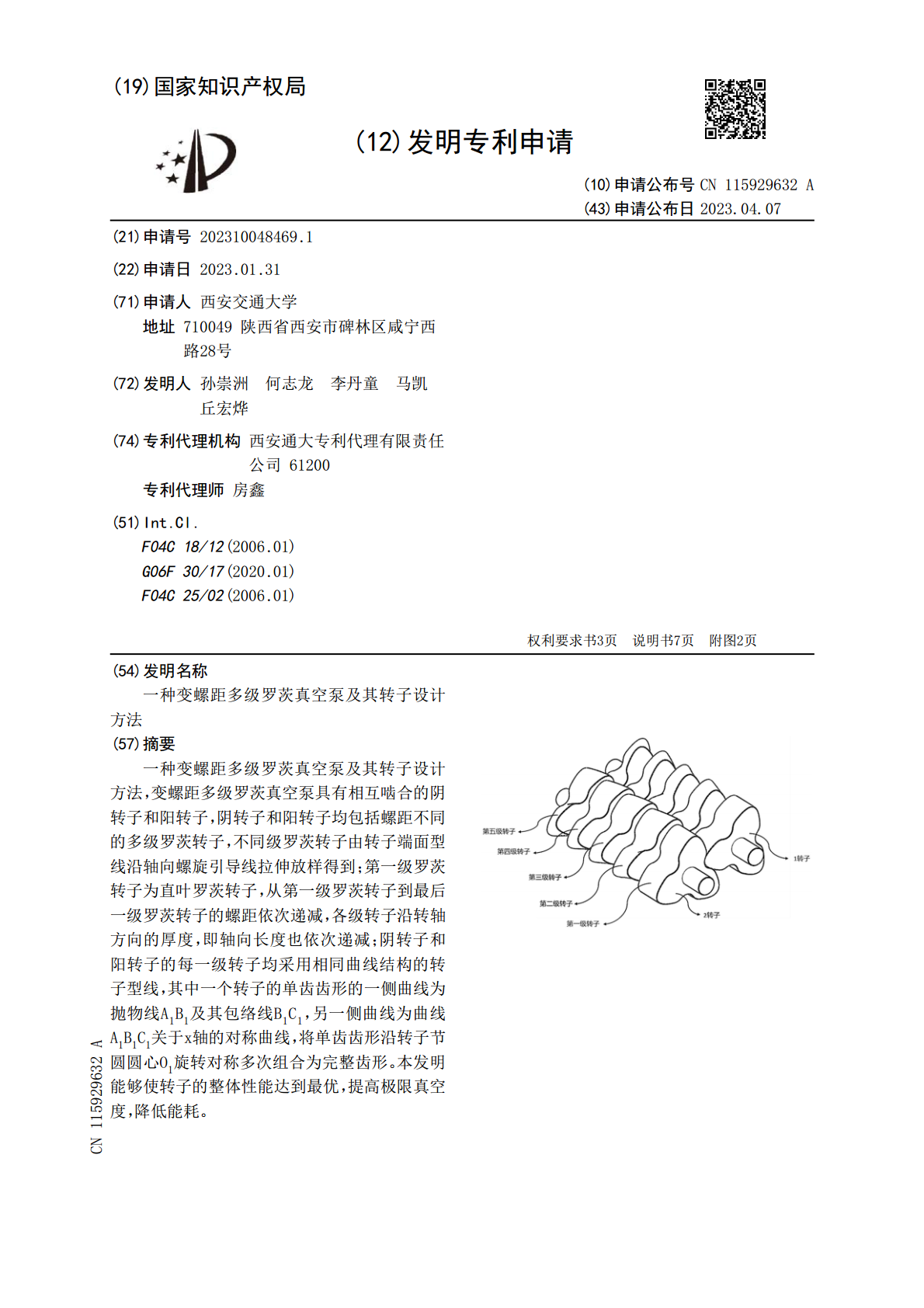
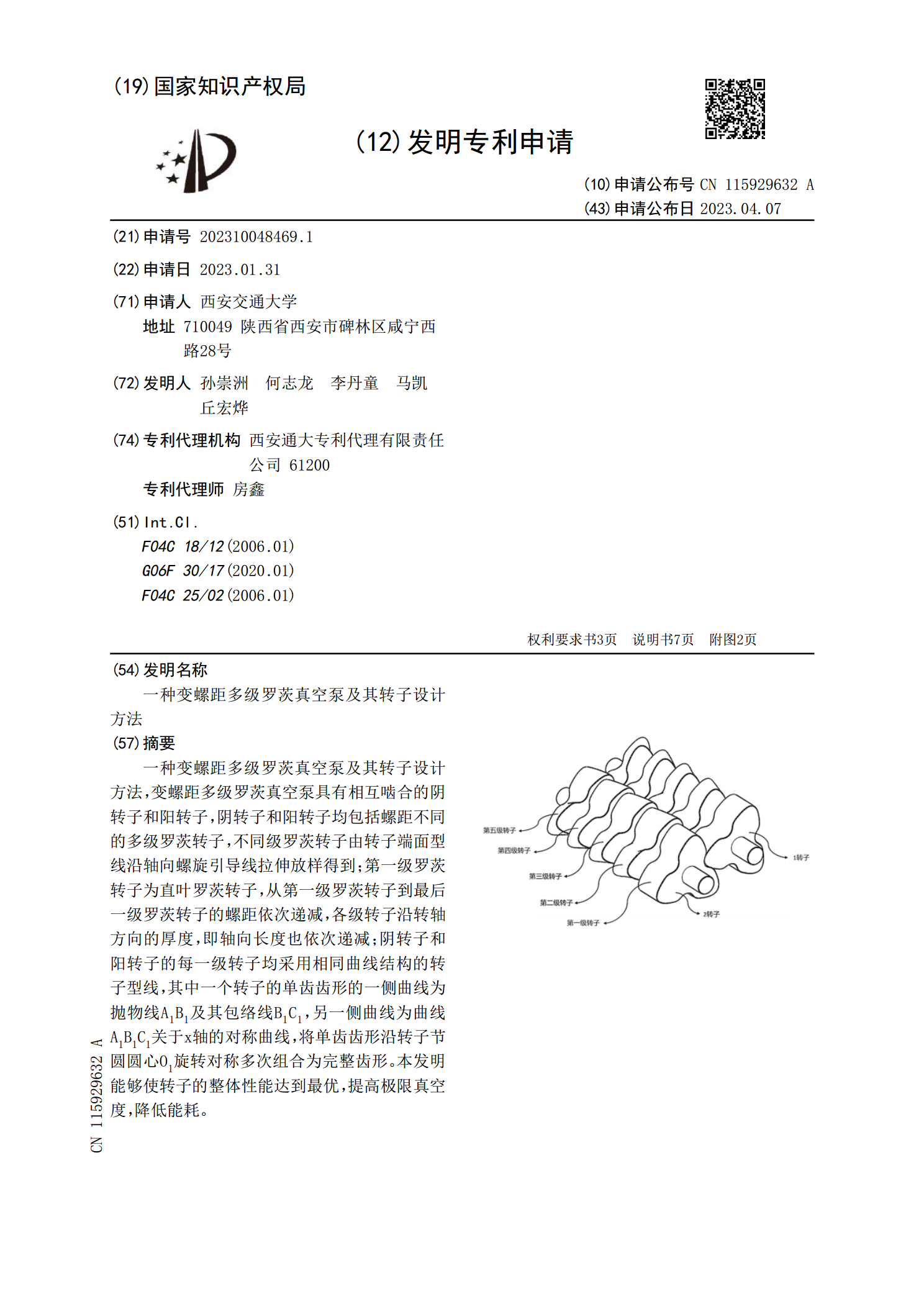
一种变螺距多级罗茨真空泵及其转子设计方法,变螺距多级罗茨真空泵具有相互啮合的阴转子和阳转子,阴转子和阳转子均包括螺距不同的多级罗茨转子,不同级罗茨转子由转子端面型线沿轴向螺旋引导线拉伸放样得到;第一级罗茨转子为直叶罗茨转子,从第一级罗茨转子到最后一级罗茨转子的螺距依次递减,各级转子沿转轴方向的厚度,即轴向长度也依次递减;阴转子和阳转子的每一级转子均采用相同曲线结构的转子型线,其中一个转子的单齿齿形的一侧曲线为抛物线A

一种多级扭叶罗茨真空泵转子及其设计方法.pdf
一种多级扭叶罗茨真空泵转子及其设计方法,在转子轴上设置有多个罗茨转子级,且随着转子级编号的增加,转子轴向尺寸或径向尺寸依次减小,使转子腔体内容积依次下降,实现级间内压缩过程;转子采用扭叶形式,通过吸排气口设计,形成单转子级内的内压缩过程。设计方法包括由抽气速率要求优选第一级转子型线的齿高半径与转子中心距;由内压缩程度要求,优选转子级数、每级转子轴向尺寸、各级转子型线的齿高半径与转子型线的齿数;利用优选参数,根据啮合定理求解转子型线;利用转子级数、各级转子尺寸与各级转子型线确定整体转子结构。本发明罗茨真空泵

多级罗茨真空泵.pdf
本发明的实施例提供了一种多级罗茨真空泵,涉及真空泵技术领域。多级罗茨真空泵包括腔体和两个转子,腔体包括依次连通的进气腔、一级压缩腔和二级压缩腔,一级压缩腔的数量为两个,两个一级压缩腔相对于二者的中平面呈对称形式;两个转子安装在腔体内,两个转子相互啮合、且同步反向转动,转子包括进气转子、一级罗茨转子和二级罗茨转子,进气转子、一级罗茨转子和二级罗茨转子分别位于进气腔、一级压缩腔和二级压缩腔。将两个一级压缩腔相对于二者的中平面呈对称形式,使转子的两个一级罗茨转子相对于二者的中平面也呈对称形式,能够减小设备的体积

一种罗茨和爪式转子组合多级干式真空泵.pdf
本发明涉及真空泵技术领域,具体的说是一种罗茨和爪式转子组合的多级干式真空泵。该泵由变频电机、主从动轴、一级罗茨主从动转子、四级爪式主从动转子、五个泵腔、排气腔、轴承腔、油箱、齿轮箱、主从动齿轮构成,其中电机有水冷,泵腔外底部固定有水循环冷却管;共有5级腔体,每级腔体中通过一定的气体流道相通;本发明转速高,体积小重量轻,一级罗茨转子和四级爪式转子组合,罗茨转子为高真空吸气级,爪形转子为压缩排气级,可以在低入口压力下获得大的抽气速率,增大压缩比提高极限真空度,节约能源,在抽速相同的情况下减小了泵的体积和重量,

一种新型多级罗茨真空泵.pdf
本发明涉及真空技术领域,具体地说是一种新型多级罗茨真空泵,包括壳体、驱动组件、主动轴和从动轴,其中主动轴和从动轴设于壳体中并通过驱动组件驱动转动,主动轴上依次设有主动螺杆转子、主动扭叶罗茨转子和主动罗茨转子,从动轴上依次设有从动螺杆转子、从动扭叶罗茨转子和从动罗茨转子,且主动螺杆转子与从动螺杆转子啮合,主动扭叶罗茨转子与从动扭叶罗茨转子啮合,主动罗茨转子与从动罗茨转子啮合,壳体内部通过隔板分成第一泵腔和第二泵腔,且各个螺杆转子设于第一泵腔中,各个罗茨转子和各个扭叶罗茨转子设于第二泵腔中,第一泵腔设有排气口