
拖地机器人.pdf

听云****君哇

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

拖地机器人.pdf
本发明属于生活电器技术领域,尤其涉及一种拖地机器人,该拖地机器人包包括拖地机和基站,所述拖地机设有轮胎,所述基站具有供所述拖地机进入所述基站内的行走面,所述轮胎的胎面上设有多个第一凸筋,所述第一凸筋沿所述轮胎的周向间隔设置;所述行走面设有多个第二凸筋,所述第二凸筋沿所述拖地机的行走方向依次间隔设置,相邻两个所述第二凸筋之间形成用于供所述第一凸筋插入的凹槽。该拖地机器人行走时,轮胎上的第一凸筋落入行走面上的第二凸筋之间,轮胎转动使得第一凸筋直接作用在行走面的第二凸筋上,从而将轮胎与行走面之间的摩擦力转换推力
拖地机器人.pdf
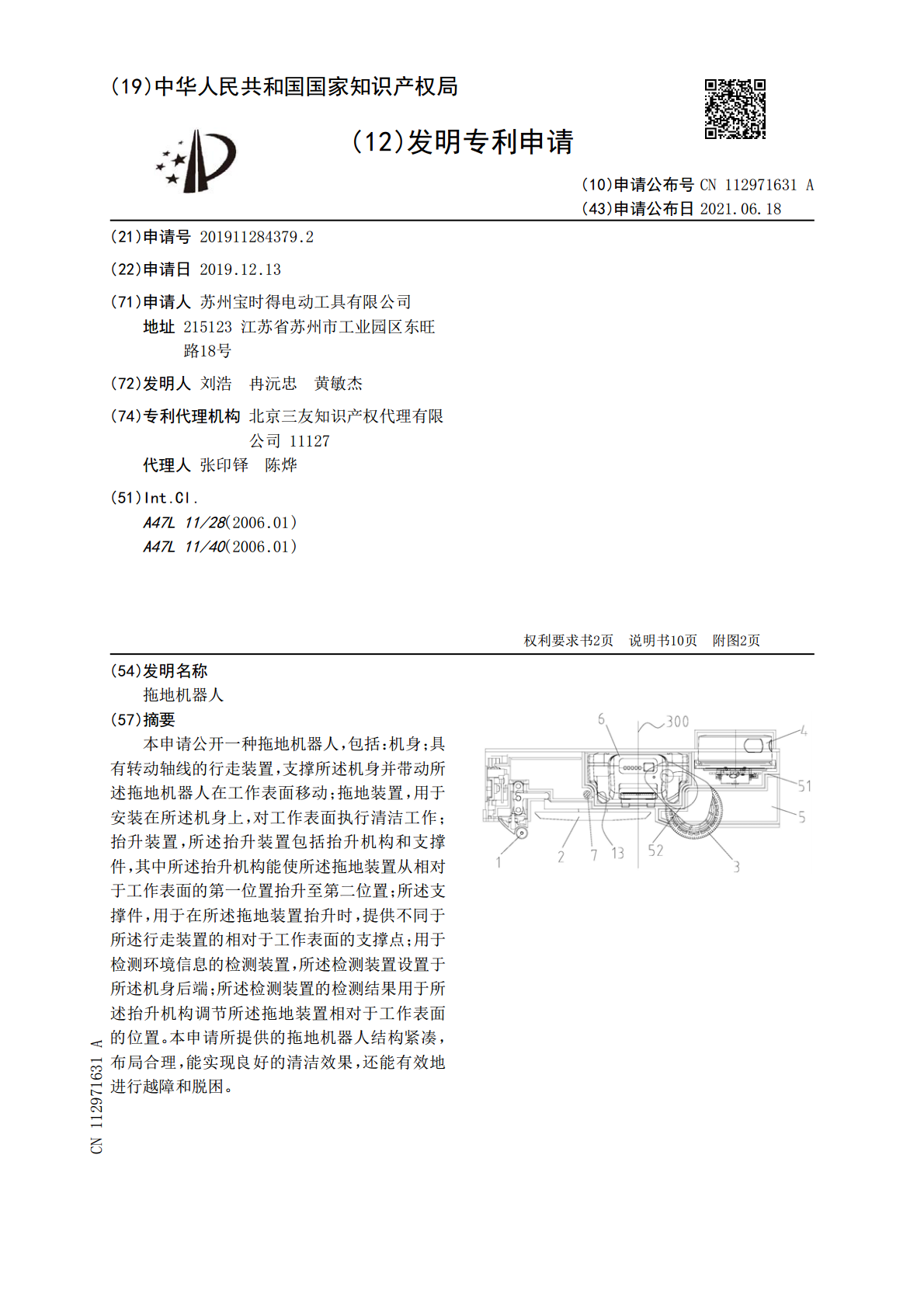
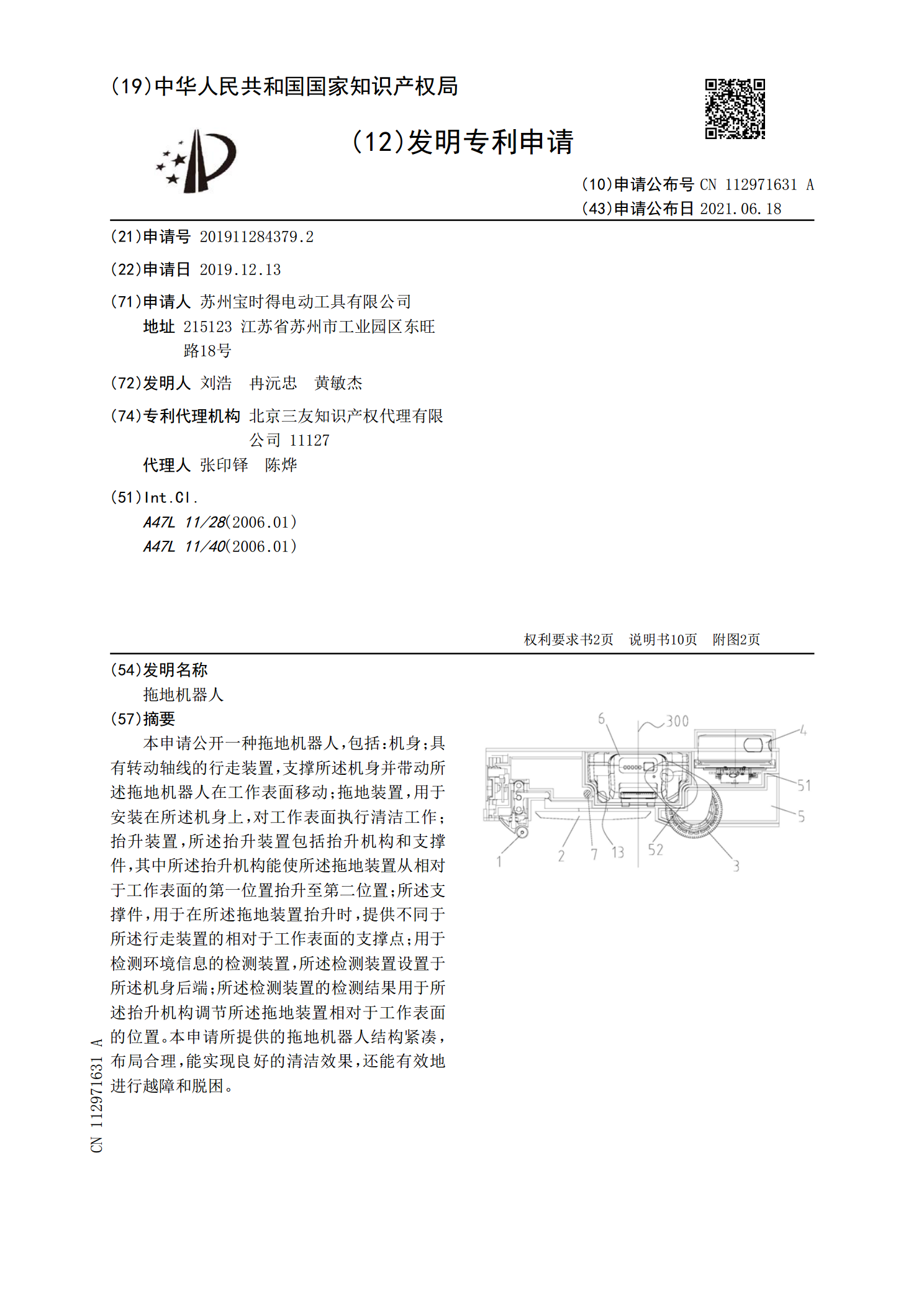
本申请公开一种拖地机器人,包括:机身;具有转动轴线的行走装置,支撑所述机身并带动所述拖地机器人在工作表面移动;拖地装置,用于安装在所述机身上,对工作表面执行清洁工作;抬升装置,所述抬升装置包括抬升机构和支撑件,其中所述抬升机构能使所述拖地装置从相对于工作表面的第一位置抬升至第二位置;所述支撑件,用于在所述拖地装置抬升时,提供不同于所述行走装置的相对于工作表面的支撑点;用于检测环境信息的检测装置,所述检测装置设置于所述机身后端;所述检测装置的检测结果用于所述抬升机构调节所述拖地装置相对于工作表面的位置。本申
多功能拖地机器人.pdf
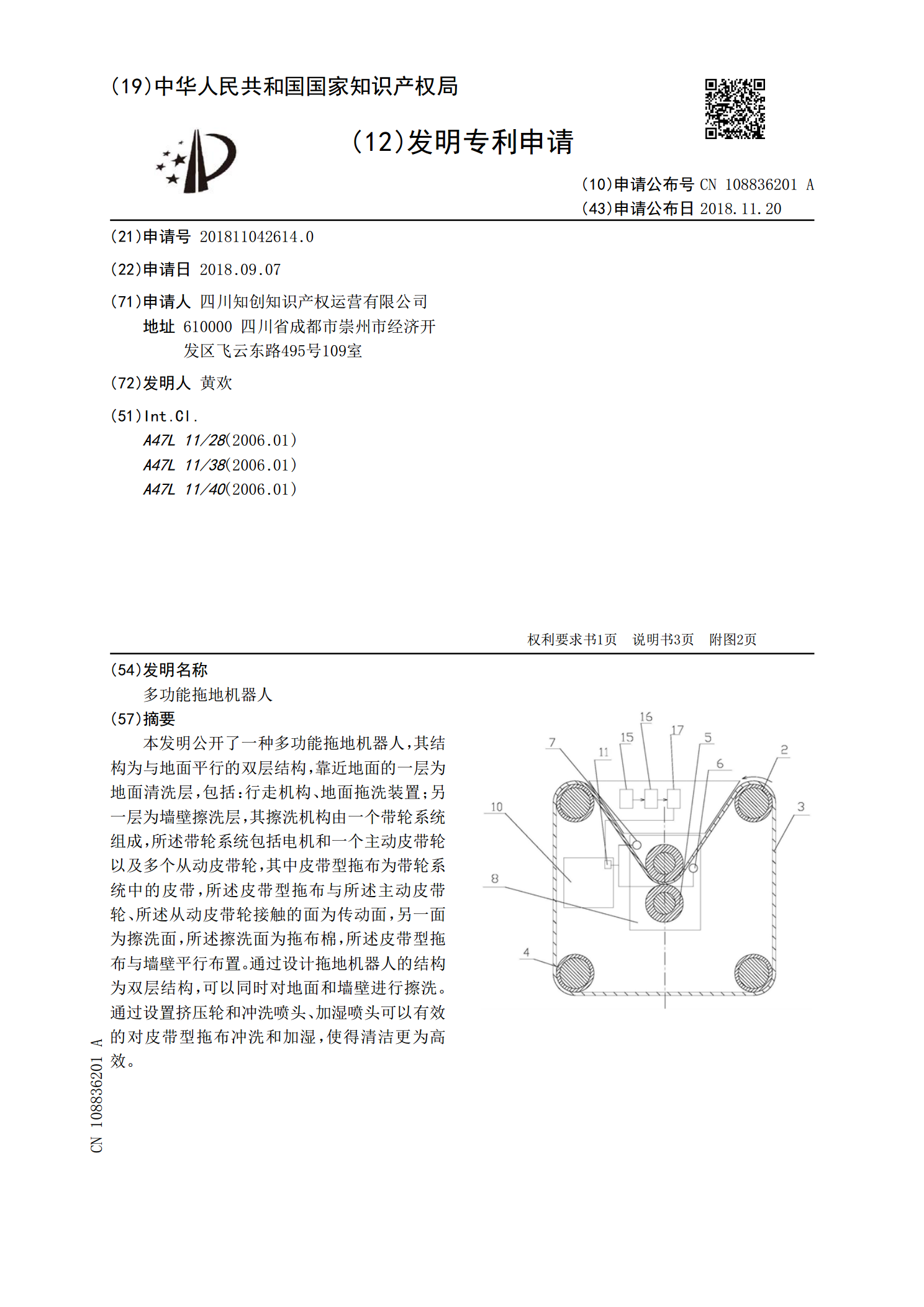
本发明公开了一种多功能拖地机器人,其结构为与地面平行的双层结构,靠近地面的一层为地面清洗层,包括:行走机构、地面拖洗装置;另一层为墙壁擦洗层,其擦洗机构由一个带轮系统组成,所述带轮系统包括电机和一个主动皮带轮以及多个从动皮带轮,其中皮带型拖布为带轮系统中的皮带,所述皮带型拖布与所述主动皮带轮、所述从动皮带轮接触的面为传动面,另一面为擦洗面,所述擦洗面为拖布棉,所述皮带型拖布与墙壁平行布置。通过设计拖地机器人的结构为双层结构,可以同时对地面和墙壁进行擦洗。通过设置挤压轮和冲洗喷头、加湿喷头可以有效的对皮带型
家庭用拖地机器人.pdf
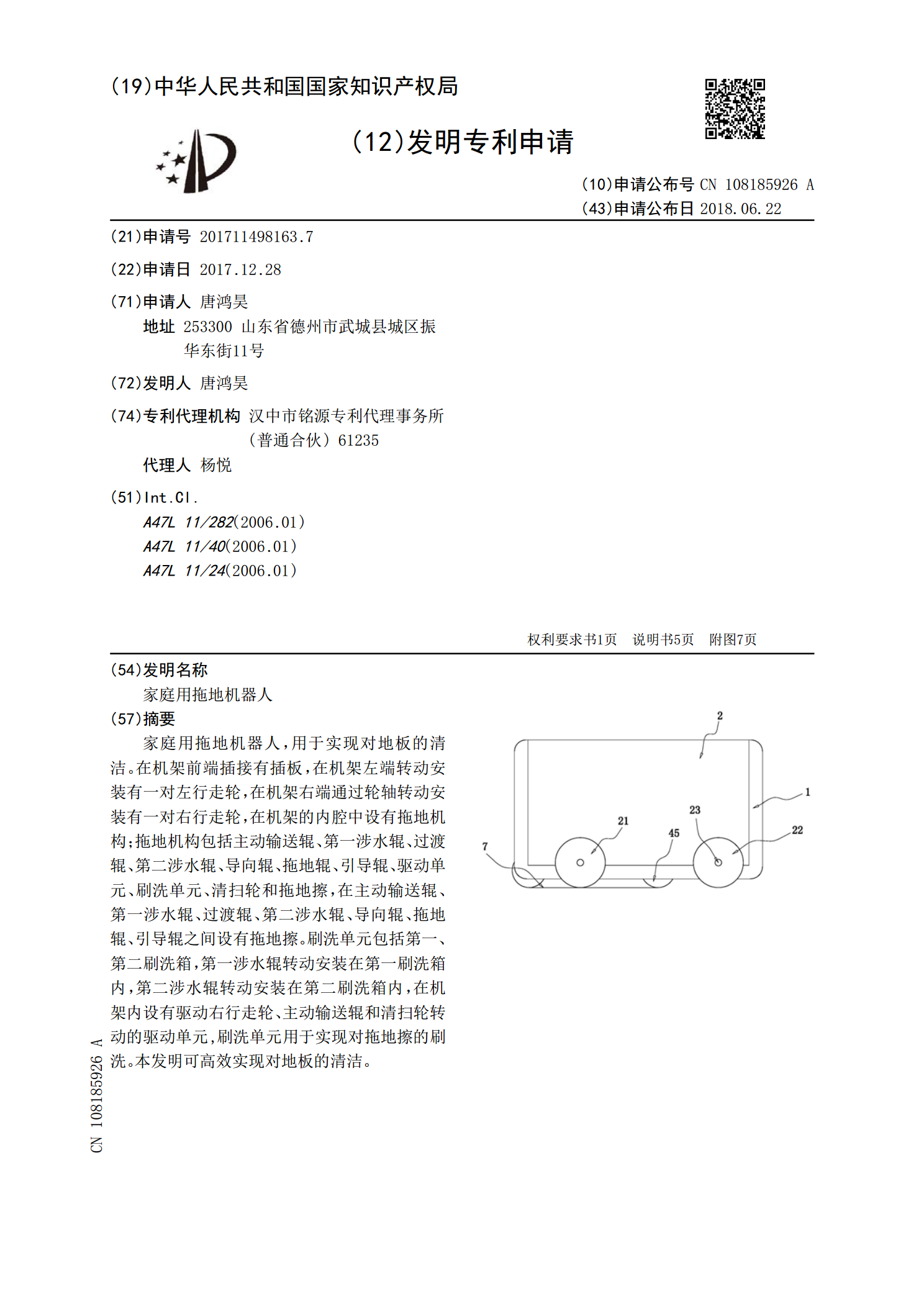
家庭用拖地机器人,用于实现对地板的清洁。在机架前端插接有插板,在机架左端转动安装有一对左行走轮,在机架右端通过轮轴转动安装有一对右行走轮,在机架的内腔中设有拖地机构;拖地机构包括主动输送辊、第一涉水辊、过渡辊、第二涉水辊、导向辊、拖地辊、引导辊、驱动单元、刷洗单元、清扫轮和拖地擦,在主动输送辊、第一涉水辊、过渡辊、第二涉水辊、导向辊、拖地辊、引导辊之间设有拖地擦。刷洗单元包括第一、第二刷洗箱,第一涉水辊转动安装在第一刷洗箱内,第二涉水辊转动安装在第二刷洗箱内,在机架内设有驱动右行走轮、主动输送辊和清扫轮转
拖地机器人的导航装置.pdf
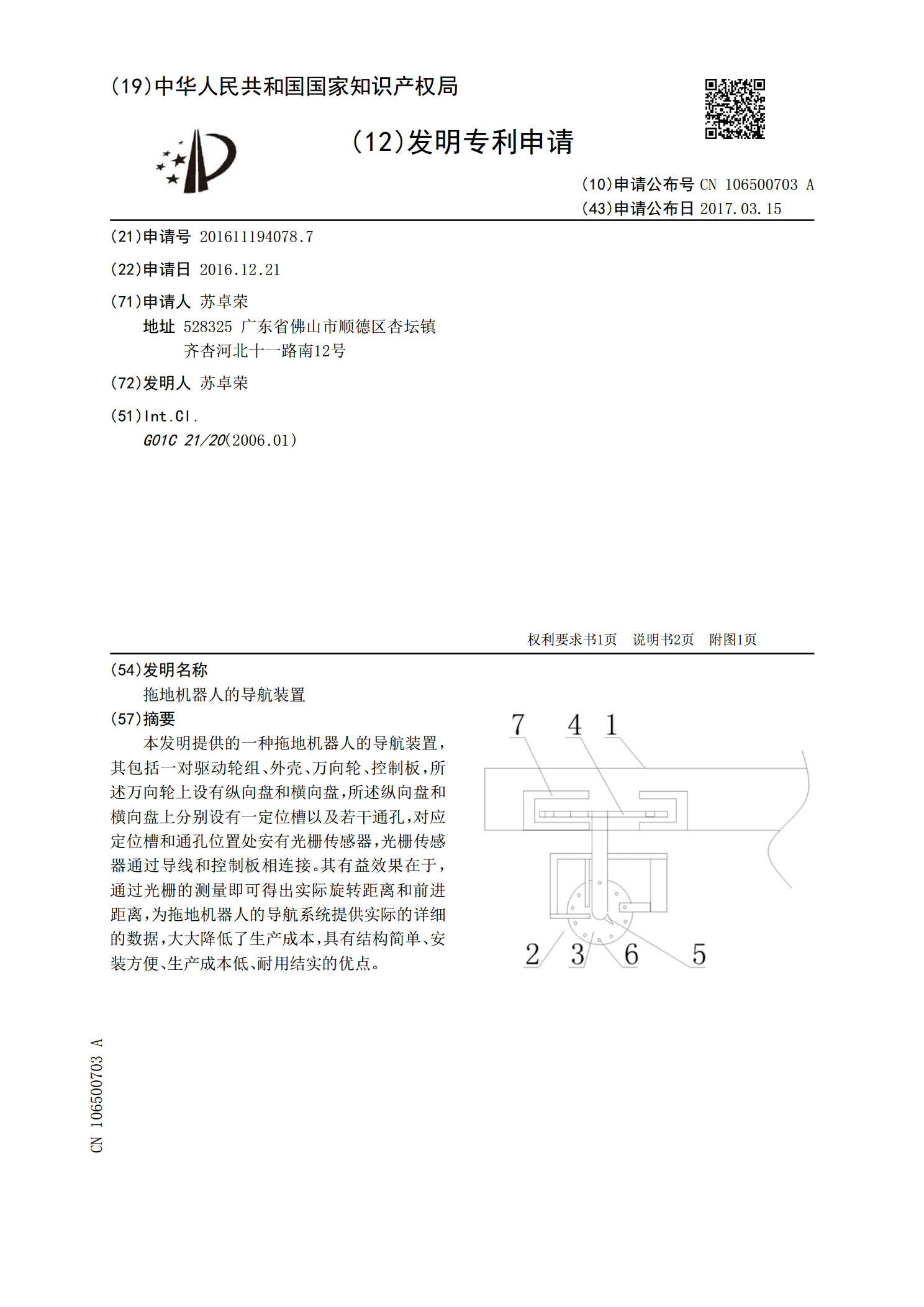
本发明提供的一种拖地机器人的导航装置,其包括一对驱动轮组、外壳、万向轮、控制板,所述万向轮上设有纵向盘和横向盘,所述纵向盘和横向盘上分别设有一定位槽以及若干通孔,对应定位槽和通孔位置处安有光栅传感器,光栅传感器通过导线和控制板相连接。其有益效果在于,通过光栅的测量即可得出实际旋转距离和前进距离,为拖地机器人的导航系统提供实际的详细的数据,大大降低了生产成本,具有结构简单、安装方便、生产成本低、耐用结实的优点。